
航标灯闪光状态下的有效光强测量
2022-03-01 10:28张临强北海航海保障中心烟台航标处山东烟台264000
中国海事 2022年2期
张临强(北海航海保障中心烟台航标处,山东 烟台 264000)
一、航标灯闪光状态下有效光强测量的必要性
(一)有效光强是航标灯的重要技术指标
航标灯在夜间发出固定灯质(包括灯光节奏、周期、颜色)的灯光为船舶航行提供导助航服务。航标灯的灯光射程是由光强决定的,而对于闪烁的灯光,其射程要根据有效光强计算。所谓航标灯节奏光的有效光强是指在同样的环境和设备条件下,定光光源和节奏光光源相比,若两者的发光强度相等,则此定光光源的发光强度即为节奏光的有效光强。航标灯要保证为过往船舶提供可靠的助航服务,就必须有足够的有效光强,使灯光达到应有的照射距离。因此,有效光强是航标灯最为重要的技术指标之一。
(二)现行检测方法存在明显的局限性
我国现行的航标灯光强检测的技术标准是《航标灯光强测量和灯光射程计算》(JT/T 730-2008),该标准规定的检测方法是在航标灯处于连续发光的定光状态下进行测量,通过计算得到节奏光的有效光强。由于航标灯光源定光发光和闪光发光两种状态存在多方面的差异,因此这种通过定光光强计算得到的有效光强的测量方式存在很大的局限性,难以准确反映航标灯闪光的真实有效光强。
(三)LED光源检测的技术要求
现在,绝大部分航标灯的光源都是LED,而LED发光效率受温度影响很大,连续发光会造成温度持续升高,远远高于闪光时的温度。在定光状态下测得的发光强度无法真实反映闪光状态下的发光强度。
航标灯光强检测实践也充分证实了这一点。《航标灯光强测量和灯光射程计算》(JT/T 730-2008)规定航标灯光强检测前预热时间为15 min,但由于不同航标灯的LED光源散热不同,在实际检测中,很多航标灯预热15 min后光强仍然不稳定,有的甚至需要预热半小时以上,严重影响了检测结果的准确性。可见,目前迫切需要在闪光状态下对LED光源航标灯进行光强检测。
(四)履行IALA建议的需要
根据IALA于2017年颁布的建议R0204(E200-4)《海上信号灯光有效光强的测定和计算》第2.0版,航标灯节奏光的有效光强应在闪光状态下进行测量,并按照修正的阿拉德法(Modified Allard Method, MAM)进行计算。
二、航标灯闪光状态下有效光强的测量方法
(一)计算公式
航标灯节奏光的有效光强采用MAM进行计算,节奏光的有效光强Ie为节奏光光强函数与视觉响应函数卷积的最大值,其计算按公式(1)和公式(2)。

式中:
I(t)——闪光在t时刻的瞬时发光强度;
q(t)——视觉脉冲响应函数。
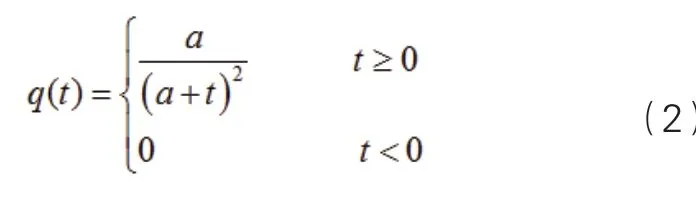
式中:
a——视觉时间常数,其中:夜间蓝光a=0.2 s,夜间非蓝光a=0.1 s;
t——时间,单位为秒(s)。
(二)测量布置
航标灯节奏光有效光强测量仪器设备布置见图1。
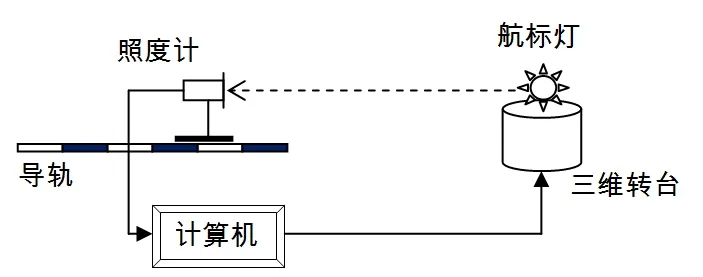
图1 仪器设备布置示意图
测量仪器设备主要包括:被测航标灯、三维转台、照度计、导轨和计算机等。
1. 被测航标灯:被测航标灯固定于三维转台上,设置到指定的灯质,稳定地发出节奏光信号,接受测量。
2. 三维转台:三维转台承载被测航标灯,在计算机的控制下,按照测量要求带动被测航标灯在三个维度上改变方向,从而实现对航标灯不同方向上灯光信号的测量。
3. 照度计:测量所接收到的航标灯灯光信号,并将测量结果传送到计算机。
4. 导轨:用于承载照度计,照度计可在其上任意滑动,保证照度计在与被测航标灯相对方向不变的前提下调节测量距离。
5. 计算机:计算机的作用一是控制测量过程,二是处理测量数据。根据测量需要控制三维转台转动,将被测航标灯转到所需要的方向;内置公式(1)(2)数学模型,对来自照度计的测量数据进行计算处理,从而得到准确的有效光强结果。
(三)测量过程
1. 测量环境:测量在暗室内进行。测量环境温度应在20℃±5℃。周围不得有灰尘、振动、潮湿等不良因素。电源电压应满足航标灯正常工作要求。
2. 灯质设定:同一航标灯在不同灯质下的有效光强不同,因此,应指定一种常用灯质进行测量,以便对测量结果进行比较判断。例如:可以采用我国航道上常用的:联闪2次、周期6 s(即明0.5 s、暗1 s、明0.5 s、暗4 s)的灯光节奏。
3. 测量:待航标灯预热工作稳定后,将测量相关参数设置于计算机,由计算机自动控制旋转工作台在水平方向以一定的角度间隔进行旋转,快速采样探头采集获得每个角度下的闪光光强曲线,通过上述MAM算法计算各角度对应的有效光强值。
三、航标灯闪光状态下有效光强测量的关键技术问题
(一)旋转精度
针对航标灯发光特点和测量需要,三维转台必须能够进行水平360°、垂直90°匀速转动,且转动步进幅度不能大于0.01°。
(二)仪器定位
光强的测量是基于兰伯特照度定律。

式中,I0为被测航标灯的光强;E为照度计接收面上的照度;l为测量距离;θ为光束与照度计接收面法线之间的夹角。
在仪器定位时,应使被测航标灯正对照度计光束接收面,即θ=0°,这样,公式(3)即变为公式(4),便于准确测量。

(三)测量距离
兰伯特照度定律是基于点光源的,而实际航标灯发光体是有一定体积的,因此测量距离应足够大,导轨足够长。而测量距离又不能太远,否则照度计得不到充分的测量光线,致使测量精度降低。
图2显示的是对一款航标灯测量距离研究的结果,该航标灯,在测量距离超过7.9 m的时候,光强变化低于2‰,公式(4)成立。根据研究,测量距离一般不能低于航标灯发光面直径的50倍,测量中可以将测量距离以0.5 m的距离递增,测量各距离下的光照度,计算对应的光强值,直至公式(4)成立。测量距离的上限是保证照度计读数不得低于0.001 lx。
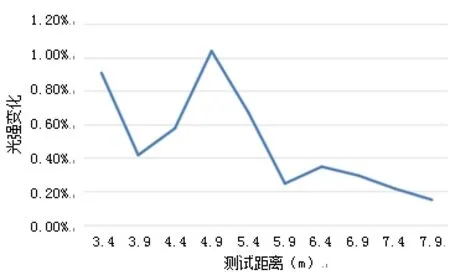
图2 航标灯测量距离研究结果
(四)预热时间
选择周期同为2 s,闪光节奏分别为亮0.4 s暗1.6 s和亮0.5 s暗1.5 s的两种灯质进行稳定时间的研究,点亮待测航标灯,每5 min测量一次航标灯的有效光强,总共监测50 min,计算各时间点的相对误差见图3。
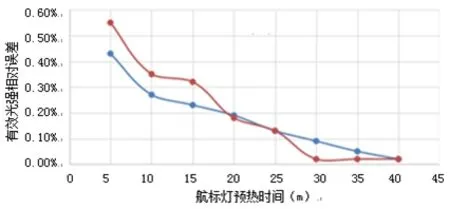
图3 航标灯预热时间研究结果
随着稳定时间的增加,有效光强相对误差逐渐降低,预热20 min后,有效光强相对误差降至2‰以下。因此,航标灯预热时间确定为20 min为宜。
(五)采样频率
MAM算法的核心是测量闪光瞬时光强曲线,采集光信号的采样频率无疑直接影响了测试结果的准确性。
图4、图5显示的是不同采样频率下测得有效光强的误差情况。采样频率分别为50 Hz、100 Hz、150 Hz、200 Hz、300 Hz、500 Hz、1 000 Hz和20 000 Hz。图4研究的是闪光周期相同而闪光明的持续时间不同的灯光信号,图5研究的是闪光明的持续时间相同而闪光周期不同的灯光信号。两组研究得出的共同结论是,随着采样频率的增大,相对误差逐渐降低,当采样频率大于500 Hz后,有效光强的相对误差降到1%以下。
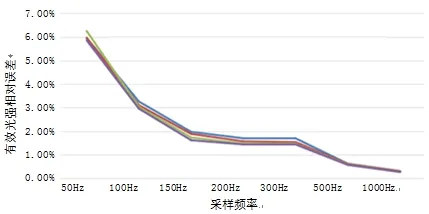
图4 不同明持续时间信号的采样频率研究结果
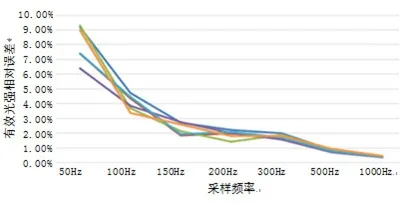
图5 不同周期信号的采样频率研究结果
因此,采样频率确定为1 000 Hz比较合适。
(六)采样时间
MAM算法的理念为测量闪光在无限长的采样时间下的光强值,故测量采样时间越长,越接近理论值。但在实际测量中,对同一测量点采样的时间必然是有限的。
图6显示的是对周期为1.5 s(亮0.2 s,暗1.3 s)的灯光信号,在1T,2T,3T,4T,5T采样时间下分别测得有效光强的变化情况。从图中可以看出,为保证测量的准确性,采样时间应至少为闪光周期的4倍。

图6 采样时间研究结果
四、结语
根据航标灯检测的实际需要,借鉴IALA建议的办法,采用MAM方法进行计算,解决了测量中的关键技术难题,对航标灯实现了在正常闪光的状态下测量其有效光强,能够更加真实准确地反映航标灯的实际发光能力。这一方法的实施,将进一步提升我国航标灯节奏光信号有效光强的测量水平,促进航标技术管理水平提升,从而进一步提高航标灯的效能,为国家蓝色经济建设更好地保驾护航。
猜你喜欢
小资CHIC!ELEGANCE(2021年36期)2021-10-15
心声歌刊(2021年4期)2021-10-13
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
智慧少年·故事叮当(2020年12期)2020-12-25
家庭影院技术(2018年10期)2018-11-02
电子制作(2018年2期)2018-04-18
海峡姐妹(2015年8期)2015-02-27
中国火炬(2013年3期)2013-07-24
中国市场(2004年9期)2004-09-23
