
基于HOLTEK单片机的智能车
2010-12-22 11:45彭晓锋
重庆三峡学院学报 2010年3期
陈 龙 邱 刚 李 昂 王 婧 彭晓锋
(重庆三峡学院物理与电子工程学院,重庆万州 404100)
1953年,美国Barrett Electric公司制造了世界上第一台采用埋线电磁感应方式跟踪的自动导向车,也被称作“无人驾驶牵引车”.在1970年代和1980年代初,“智能车”的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发.
随着社会的发展,智能控制已经融入到了我们的学习和生活之中,它给我们带来了很多的方便,所以研究它对于我们有着重要的意义,也为我们的生活添加了许多乐趣.人们在不断探讨、改造、认识自然的过程中,制作出许多有趣的智能车,让我们在学习、工作、生活中找到更多乐趣.我们就以 Holtek MCU HT46R单片机为核心,设计出防跌落、碰撞的智能车.为了体现Holtek MCU HT46R单片机在趣味性上的应用,我们通过设计智能车来实现,同时在此作品的基础之上进行改进可以设计出清洁机器人.
1 工作原理
以Holtek MCU HT46R单片机为核心,设计上采用Holtek MCU HT46R单片机为主控器,利用红外反射式光传感器采集数据,把采集到的数据送入到以Holtek MCU HT46R为核心的单片机,通过处理数据,然后传入到直流电动机,以实现当智能车直线行走到达边缘或遇到障碍时能自动转弯继续前进的功能.
智能车可以分为信息采集模块、单片机模块、执行模块、电源模块这4个模块.
信息采集模块:该模块实现外部信息的采集,供微控制器处理,其核心是红外反射式光电传感器.为了能探测到前方和地面边缘的信号,我们采用了四个反射式红外光电传感器,其中两个用来检测地面的边缘信号,我们设置它为低电平触发.还有两个用来探测前方阻碍物信号,设置为高电平触发.因为我们把反射式红外光电传感器的输出信号作为Holtek MCU HT46R单片机的中断信号,所以我们用到74LS20,74LS00这两个逻辑电路,将四个传感器的信号通过它,然后作为Holtek MCU HT46R单片机的中断信号.
执行模块:该模块包括电机驱动,我们采用TA7267BP直流无刷电机来充当执行模块.当接收到MCU的命令后便执行相应的操作.为了实现转弯功能,小车的左右轮子分别采用了单独的电机.小车转弯通过一个轮子正转,另一个轮子反转来实现.为了避免原地行驶,我们设定当收到MCU的命令,小车向左转.
电源模块:经过多次实验,我们采用四节普通电池作为电源模块.
单片机模块:根据智能车的功能需要,我们选用了HT46RU232为我们的主控芯片,其主要实现信息处理和控制模块.使用Holtek MCU HT46R单片机主要实现的功能:将红外反射光电传感器收集的数据通过逻辑电路,计算出中断信号,然后判断是否产生中断,将中断信号通过电机驱动芯片传给电动机,使小车实现直线走、停止、转弯等功能,从而实现防止跌落和碰撞的功能.
2 作品介绍
2.1 系统的方块图如下图所示:
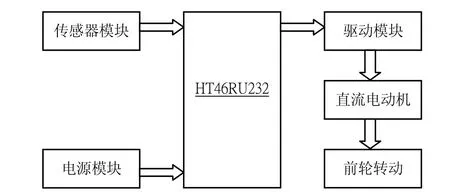
2.2 智能车以HT46RU232为我们的主控芯片,其主要实现:处理传感器采集的数据,并判断中断是否产生,然后把控制信号传递给电动机.其协同关系如下图所示:

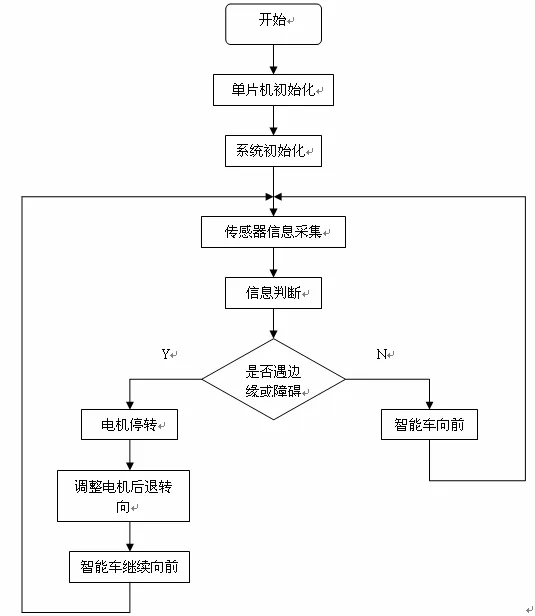
2.3 程序流程图如下图所示:
3 测试方法
3.1 由于智能车设计属于移动性高精度实时控制领域,因此各模块必须具有精度高、传感器综合控制、智能控制等性能要求,所以测试时将整个智能车系统分为:信息采集模块、单片机模块、执行模块以及电源模块.
传感器测试:作品采用了四个红外反射式光电传感器,其中两个是地面传感器,另外两个用于探测前方阻碍.
测试过程中我们用纸片充当阻碍物来测试前方传感器.当纸片由远到近,观察传感器上指示灯的提示,来调整需要的测试范围,并且通过测试传感器相互感应范围,用纸片测试出盲区,然后通过调整四个传感器的位子,避免出现检测的盲区.
电机模块测试:我们通过程序,给电机模块不同的指令,看轮子是否按设定的方式转动.
程序测试:通过与传感器模块、电机模块一同协调测试.
整体测试:当所有的模块测试没有问题后,我们将程序下载到芯片上进行测试.当按下开关,可以观察到小车无法实验防跌落的功能,即遇到边缘不会转弯.我们先检查电路板是否正确,发现无误后,我们通过小车运行的过程中,检测各个部分的电压是否达到预定值,但均没有问题.我们想到是否是中断信号有干扰,我们通过示波器观察中断信号,没有发现有毛刺等不稳定的波形.最后通过查资料在逻辑门与主控芯片之间加了一个10 uF的电容,然后检测,终于实现防跌落、碰撞的功能.
通过一系列的测试,智能车能实现预期的所有功能,即当开关按下,智能车沿直线行走,当遇到地面边缘或障碍物时,智能车能自动转弯继续前进,从而达到防跌落和碰撞的功能.
猜你喜欢
锦绣·下旬刊(2021年11期)2021-10-12
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
中国电气工程学报(2020年2期)2020-07-28
科技视界(2019年20期)2019-08-29
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
物理实验(2017年2期)2017-03-21
