大磁矩磁力矩器驱动电路的一种设计方案
2010-12-11 08:00范佳堃王友平崔赪旻
空间控制技术与应用 2010年2期
范佳堃,王友平,崔赪旻
(北京控制工程研究所,北京 100190)
大磁矩磁力矩器驱动电路的一种设计方案
范佳堃,王友平,崔赪旻
(北京控制工程研究所,北京 100190)
研究了一种1500~2000 A·m2的大磁矩磁力矩器的驱动电路设计方案.电路主要采用脉宽调制+H桥驱动的形式,根据输入信号的不同,输出的激磁电流呈线性变化.针对大磁矩磁力矩器电气参数的特点,建立简化电气模型,确定电气参数值,并提出抑制剩磁矩的方法和使用中的注意事项.该电路功耗小,控制方式简单,通常与大磁矩磁力矩器一同用于大型航天器的姿态控制.
大磁矩磁力矩器;驱动电路;脉宽调制+H桥驱动
磁力矩器是航天器的执行部件之一,由磁力矩器本体和为其提供特定激磁电流的驱动电路组成.由于磁力矩器在体积、质量、功耗、寿命等方面具有优势,加上地磁模型的完善,剩磁补偿、星载计算机软件算法及主动磁控技术的发展,使磁力矩器在航天器姿态控制方面得到了广泛应用,且在航天器控制工程中磁控技术也取得了一定的进展.目前国际上使用的磁力矩器输出的最大磁矩通常为5~1 000 A·m2[1-3].国内磁力矩器已从几十A·m2发展到几千A·m2,在轨使用的磁力矩器输出的最大磁矩为400 A·m2.随着中国航天事业的发展,特别是空间站的组建,大型航天器的研制势在必行.大型航天器由于体积结构庞大、姿态机动能力要求较高,因此对动量交换执行机构有较大的动量要求,对磁力矩器同样有较大的动量卸载要求,也就是对磁力矩器输出的最大磁矩有了更高的要求.本文提到的大磁矩磁力矩器是指输出的最大磁矩在1 500~2 000 A·m2的磁力矩器.
磁力矩器驱动电路的功能是为磁力矩器提供特定的激磁电流,使磁力矩器输出特定的磁矩.驱动电路形式与控制系统的方案有关,目前驱动电路的形式主要有两种:一种为开关形式(输出的激磁电流是一恒定值或为0),磁力矩器输出的磁矩为确定值;一种为线性形式(输出的激磁电流在一定范围内根据控制信号幅值的不同呈线性变化),磁力矩器输出的磁矩线性可控[3-4].
1 磁力矩器的电气模型
磁力矩器的主体通常是一根圆柱形的软磁芯棒,在芯棒上缠绕一定匝数的漆包圆铜线[4-5],根据输出磁矩的大小,确定绕线的层数及每层绕线的匝数.芯棒上缠绕的漆包圆铜线之间存在分布电容,在通电的情况下产生电感,且导线上也必不可少的存在损耗电阻.由于分布电容既存在于同层的相邻绕线间,也存在于不同层的相邻绕线间,导致磁力矩器的电气模型比较复杂.假设绕线一共有N层,每一层有n匝,每层相邻两匝线圈间的分布电容为xi,层与层间相邻两匝线圈间的分布电容为ki,如图1所示,其中“A-A”为垂直于软磁芯棒轴向的任意剖面.图2为磁力矩器的等效电气模型[6].

图1 磁力矩器分布电容示意图

图2 磁力矩器等效电气模型

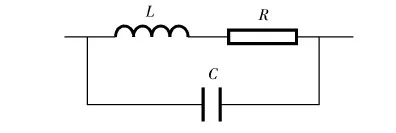
图3 磁力矩器的简化电气模型
首先根据磁力矩器的材料、外形尺寸、漆包圆铜线的规格、缠绕方式等确定磁力矩器的电感量L和损耗电阻R,然后在简化模型的基础上,通过谐振法确定分布电容C.
2 驱动电路方案
由于大磁矩磁力矩器输出的最大磁矩在1 500~2 000 A·m2,如果驱动电路采用开关形式,那么磁力矩器将对航天器产生一个不小的扰动,且姿态控制精度明显降低.驱动电路如采用线性形式可以有效解决以上问题.
由于大磁矩磁力矩器工作时需要的工作电压较高,且驱动电路需要采用线性形式,所以为降低驱动电路的功耗,电路采用脉宽调制(PWM)的方式.利用磁力矩器的电感特性(通过它的电流不能突变)来实现通过改变PWM电路的占空比来控制磁力矩器上电流的变化,实现磁矩线性可控.假设输出磁矩为m、激磁电流为i、PWM电路的占空比为d、磁矩控制信号为u,那么有以下的关系:

式中,k1、k2、k3为比例因子,数值由驱动电路本身决定,为此磁矩的大小只取决于磁矩控制信号的大小,并具有一定的线性关系.
磁矩的方向通过H桥电路进行控制.整个磁力矩器驱动电路采用脉宽调制+H桥驱动的形式.
3 驱动电路的设计
3.1驱动电路的对外接口
驱动电路与星载计算机、负载(磁力矩器)、星上电源及遥控系统之间的接口关系如图4所示.图中:星上电源为驱动电路供电;星载计算机为驱动电路提供磁矩控制信号,此信号通常为-5~+5V的电压模拟量;磁力矩器为被驱动负载;遥控系统用于接收驱动电路输出的遥测信号,用来反映激磁电流的状态.
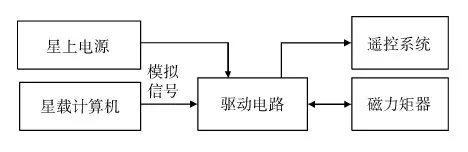
图4 驱动电路对外接口图
3.2驱动电路参数的确定
驱动电路的参数要根据负载特性及工作模式确定.由式(2)可以计算出磁力矩器工作时所需要的最大激磁电流I.

(2)
式中:M为最大磁矩;Vcore为软磁芯棒体积;I为最大激磁电流;Na为衰减系数;B为线圈总匝数;μr为软磁芯棒材料的相对导磁率;Nd为去磁因子;L′为绕线的有效长度.
驱动电路使用到的电源主要包括逻辑电路和基准电路要用到的逻辑电源(电压值为±12V或±15V)及为磁力矩器提供电流的驱动电源U,由于航天器提供的一次母线电压值一定,驱动电路要通过DC-DC变换器将其转换为所需要的二次电源.驱动电源U的电压值可以通过式(3)进行确定.
U=I×R+a
(3)
式中,a为常数,取值在5~10 V,用于驱动电路上的损耗.
PWM的开关频率f主要取决于对激磁电流品质的要求和电路中元器件的性能.从电流平稳性的角度出发,希望f越高越好,这样漆包圆铜线上的瞬时电流值更接近所期望的电流值.但是f不能高于电路正常工作所能允许的最高频率.而最高频率是由电路中使用的元器件的工作频率决定的.
3.3电路组成及原理
驱动电路的原理框图如图5所示,其组成如下.

图5 驱动电路原理框图
(1)二次电源电路
二次电源电路主要由前置级电路和变换器电路组成.前置级电路的主要功能是提供输入端的过流保护,减小二次电源对航天器一次母线的干扰,为变换器提供相应的电源.变换器电路采用双管正激变换器拓扑电路,其功能是将一次母线转换成特定的二次电源,为驱动电路提供逻辑电源和驱动电源.
(2)锯齿波发生器
锯齿波发生器的主要功能是提供与磁矩控制信号相比较的波形.
(3)输入信号处理电路
输入信号处理电路主要由1个反相器和1个射极跟随器组成,其功能是将-5~+5V的磁矩控制信号转换为单一方向的-5~0V的控制信号,并将此信号输出到前置放大电路,通过与锯齿波的比较进行脉宽调制,从而调整驱动电路输出的激磁电流的大小.
(4)前置放大电路
前置放大电路的功能是控制H桥电路中两个上桥臂工作在PWM状态下的占空比.电路采用比例积分(PI)的形式,并以差分方式引入激磁电流负反馈,以保证磁力矩器电流稳定,从而保证磁力矩器输出磁矩的稳定.
(5)方向电路
方向电路采用过零比较器电路,目的是根据磁矩控制信号方向的不同,将-5~+5V的电压模拟量信号转换为一个逻辑电平信号.此信号的状态将决定H桥电路的导通方向.从式(2)可以看出,磁矩的方向只取决于激磁电流的方向,即通过控制H桥电路电流导通方向可以改变磁矩方向.
(6)H桥电路
H桥电路的示意图如图6所示.H桥电路的导通状态由方向电路控制,处于工作状态的两个功率管如V1和V4,其中下桥臂上的功率管V4处于常导通的状态,上桥臂上的功率管V1处于PWM的状态.整流二极管Z3和Z4的作用是在上桥臂的功率管V1处于截止状态时进行续流,在设计上对桥臂的控制信号加入死区以防止发生上下桥臂对通的现象.

图6 H桥电路的示意图
(7)遥测电路
遥测电路的功能是反映驱动电路输出的激磁电流的大小和方向,通常为0~5V的电压模拟量,且要求与激磁电流具有一定的对应关系.
4 注意事项
大磁矩磁力矩器驱动电路,由于其负载的特殊性和复杂性,在设计和使用中均有值得关注的方面.
4.1电磁兼容性
为降低驱动电路的功耗,驱动电路采用了PWM的方式调整激磁电流的大小,同时,驱动电路中的二次电源电路也具有工作频率,该工作频率要根据PWM的频率加以确定,避免电磁干扰.在此基础上,还可以通过在DC-DC变换器电路和PWM电路间实现空间隔离(如增加金属隔板)、在DC-DC变换器电路和PWM电路间的连接处增加滤波电路、在离IC芯片电源及输入端管脚尽可能近的地方放置去耦电容等方法降低电磁干扰对电路性能的影响.
4.2反电势的消除及电路保护
大磁矩磁力矩器的电感量很大,在关闭时会产生很大的反电势.为消除反电势,驱动电路中应设计续流回路[7].续流回路的形式有很多种,要根据控制系统对响应时间的要求以及驱动电路自身的特点,进行有针对性的设计.
4.3剩磁矩的抑制
剩磁矩是用零输入时的磁矩占最大磁矩的百分比来定义的,其大小也是衡量磁力矩器性能的重要指标,有效抑制剩磁矩的大小可以减小磁力矩器对航天器姿态的扰动[8].如果控制系统要求磁力矩器的剩磁矩很小或近似为0,那么驱动电路设计中要采用消磁电路,以保证零输入时,剩磁矩可以满足控制系统的要求.
这里介绍两种抑制剩磁矩的方法.一种是对磁力矩器的输出磁矩采用闭环控制方法,在控制线路中增加霍尔传感器网络,利用该网络将磁力矩器产生磁场的磁感应强度转换为电压信号,经反馈与磁矩控制信号共同控制驱动电路,其原理框图如图7所示.这种方法的优点是控制精度高,缺点是驱动电路结构过于复杂[4].一般磁力矩器的剩磁矩的大小为一固定值,主要取决于磁芯棒材料的磁性能,另一种方法就是基于剩磁矩的这个特点,先对剩磁矩的大小进行标定,再将标定值作为磁矩控制信号为零时,磁力矩器输出磁矩的固定偏差,通过驱动电路对此偏差进行校正.确保在磁矩控制信号为零时,驱动电路输出的激磁电流可以使磁力矩器产生一个与剩磁矩大小相等方向相反的磁矩.该方法简单、易实现,但精度不如前一种方法.

图7 磁矩闭环控制电路原理框图
4.4使用方法
大磁矩磁力矩器不仅电感量很大,在输出最大磁矩时,自身的功耗也很大,针对各种不同的工作模式,要明确其使用方法,以避免错误的使用对驱动电路造成损坏,影响其性能指标.使用要求主要体现在以下几个方面.
1)磁矩控制信号不能直接换向,应该采用过零的控制方式.因为如果磁矩控制信号直接换向,驱动电路将会对驱动电源产生充电现象,使驱动电源的电压值升高,电压升高的幅度取决于换向前激磁电流的大小.由于大磁矩磁力矩器电感量过大,在磁矩控制信号直接换向时,磁力矩器释放出大量的能量,使驱动电源电压值大幅升高,极易造成驱动电源的损坏.
2)在加电时应遵循先加一次电源,再从零逐步调节磁矩控制信号;断电时应遵循先将磁矩控制信号逐步调整到零,再断一次电源.避免磁矩控制信号的绝对值较大时,直接接通或断开一次母线对飞行器的姿态产生较大的扰动.
3)如果驱动电路有备份且负载(磁力矩器)没有备份,那么主备份电路在切换前应将磁矩控制信号逐步调整到零,再进行切换.目的是防止主备份电路串电,导致出现主备份电路均失效的现象.
5 结 论
大磁矩磁力矩器有着广泛的应用前景,并有磁矩不断增大的趋势.围绕着如何驱动这个功率部件目前国内已开始了一些研究.本文针对大磁矩磁力矩器电气参数的特点,提出其驱动电路的一种设计思路和原理实现方法,电路主要采用脉宽调制+H桥驱动的形式.该电路功耗小,控制方式简单,通常与大磁矩磁力矩器一同用于大型航天器的姿态控制.
[1] 屠善澄.卫星姿态动力学与控制(4)[M].北京:宇航出版社,2006,400-406
[2] 黄福铭.航天器飞行控制与仿真[M].北京:国防工业出版社,2004,37-38
[3] 郑育红,王平.一种用磁力矩器控制卫星姿态的新方法[J].宇航学报,2000,21(3):94-99
[4] 孔庆松,赵光恒.磁力矩器反馈控制电路设计与仿真[J].计算机仿真,2007,24(1):29-31
[5] 易忠,袁胜华.卫星强磁场干扰分析[J].航天器环境工程,2005,22(2):77-80
[6] 蔡圣清,周玉慧.分布电容对变压器内参数影响不可忽略性分析[J].陕西理工学院学报(自然科学版),2008,24(4):30-32
[7] 李保军.全数字智能控制系统在磁力吊车上的应用[D].武汉科技大学,2006
[8] 李杨,涂歆滢.星体剩磁矩对姿控系统影响的仿真研究[J].系统仿真学报,2002,14(2):215-218
ADesignMethodofLarge-Magnetic-TorquerDriveCircuit
FAN Jiakun, WANG Youping, CUI Chengmin
(BeijingInstituteofControlEngineering,Beijing100190,China)
The paper investigates the design skills and principle of a large-magnetic-torquer drive circuit, adopting pulse width modulation and H-bridge.The drive circuit can output linear-current with analog input signal.According to the characteristics of the large-magnetic-torquer electric parameters, a simple electric model is established and a method for determining electric parameters is presented.Also methods for eliminating the remanence and remarks of the circuit application are proposed.This kind of circuit is usually used in the attitude control systems of large spacecrafts with large-magnetic-torquer, and has been validated to be low-consumption and easy-controlled.
large-magnetic-torquer; drive circuit; pulse width modulation and H bridge
2009-04-26
范佳堃(1977—),女,哈尔滨人,工程师,研究方向为航天器执行结构驱动电路(e-mail:fjkzy1530@sina.com).
TH133,V448.22
A
1674-1579(2010)02-0058-05
猜你喜欢
国际太空(2022年7期)2022-08-16
中国特种设备安全(2022年2期)2022-07-08
国际太空(2019年9期)2019-10-23
航天器工程(2019年3期)2019-07-31
数字海洋与水下攻防(2019年2期)2019-06-28
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
山东青年(2016年12期)2017-03-02
航天器环境工程(2016年4期)2016-09-09
航天制造技术(2016年6期)2016-05-09