
并联混合动力电动汽车动态协调控制策略及仿真研究
2010-12-03 09:46:56严运兵颜伏伍杜常清
中国机械工程 2010年2期
严运兵 颜伏伍 杜常清
1.武汉科技大学,武汉,430081 2.武汉理工大学,武汉,430070
0 引言
根据并联混合动力系统中电动机输出动力与汽车驱动系统的组合位置的不同,并联混合动力传动系统可分为单轴联合式、双轴联合式和单驱动系联合式等3种基本形式,这3种基本形式的动力传动系统都能实现发动机驱动、纯电动以及发动机/电动机联合驱动这3种驱动模式。此外,在特定情况下混合动力系统还可以实现驱动状态下的行车充电模式以及减速制动状态下的再生制动(能量回馈)模式[1-2]。根据路况,并联混合动力汽车在工作过程中选择其工作模式并进行能量分配,完成工作模式的切换。
按照时间尺度和系统响应特性,可以将混合动力汽车的控制问题分为两类[3]:①在稳态和动态过程中多个动力源的转矩分配(也可以是功率分配)与效率优化问题,主要根据两动力源的稳态特性进行控制,属于能量管理的研究范畴;②状态切换过程中动力源间的相互配合问题,属于动态控制的研究范畴,这一问题还涉及发动机转矩的实时反馈。
多年来,虽然对并联混合动力汽车的能量管理研究较多,但都主要集中在并联混合动力系统稳态过程中多个动力源的能量分配和效率优化方面[4-8],对控制策略中涉及混合动力系统工作模式切换过程中的转矩动态控制的研究相对较少。事实上,在状态切换过程这一很短的时间内,发动机和电动机的油门开度发生急剧变化,此时发动机转矩等输出由于其响应滞后于油门开度的变化而呈现动态特性,动态特性相对稳态特性有较大滞后,使输出转矩不足或出现超调;电动机则能迅速响应油门开度的变化而呈现出与稳态时几乎相同的动态特性[9]。这样,如果仍然根据稳态特性进行能量分配,势必因为发动机稳态特性和动态的差别而造成总需求转矩在状态切换前后出现较大波动,影响整车的舒适性。可见,在状态切换过程中,对发动机和电动机进行动态协调控制是必须的。
动态协调控制的关键在于控制切换过程中总需求转矩(即发动机和电动机转矩之和)的波动幅度,控制方法主要是以发动机的实时转矩反馈为基础,利用电机的快速响应特性进行转矩补偿,达到总需求转矩不产生大的波动从而提高舒适性的目的。日本丰田公司的Prius混合动力汽车利用其特有的动力分配机构很好地解决了发动机和电动机的动态协调控制问题,但该技术只适用于具备动力分配机构的混合动力系统,不具普适性[10]。为此,需要提出新的具有较大范围适应性的动态控制策略。
1 混合动力汽车的运行状态分析及控制算法的提出
以图1所示单轴并联混合动力结构为本文控制算法的研究对象。在该混合动力结构中,电动机与发动机共轴,由此决定了电动机的三种工作状态:空转、驱动及制动。其控制也相对简单,只是对电子油门的开和关进行控制,控制比较迅速。而要过渡到发动机工作或发动机关闭状态,则存在发动机的启动、调速和停机问题,在发动机启动和停机过程中还存在离合器接合与分离的问题,在此将这一问题统称为发动机的调速。相应地,混合动力系统动态控制算法中应包含发动机的调速控制。
表1为图1所示结构可能的5种运行状态。根据道路负载的大小,混合动力系统的运行状态可能在纯电动、发动机驱动、行车充电、联合驱动、能量回馈5种目标状态间相互切换。在任一运行状态下,混合动力系统的多能源总成控制器根据驾驶员的加速踏板开度确定出整车的需求转矩,并将这一需求转矩合理地分配给发动机和电动机,在此称之为预分配。
以整车运行状态从纯电动切换到发动机驱动为例分析状态切换过程。切换前,假设电动机的输出转矩为60N˙m,切换时电动机的目标转矩需要由60N˙m快速变为0,发动机目标转矩需要由0很快达到电动机切换前的转矩60N˙m,这样才不至于引起总目标转矩的波动。在这一切换过程中,发动机为了及时达到目标转矩,其节气门开度会在很短时间内快速增大到发动机目标转矩对应的节气门开度。由此可知,发动机在节气门开度变化过程中,输出转矩实际上不可能快速达到目标转矩,这样会引起状态切换过程中总目标转矩产生波动,进而造成整车的冲击,影响舒适性。与发动机存在响应滞后不同,电动机能很快响应电子油门,输出其目标转矩,如果在切换过程中能由电动机将发动机稳态转矩与动态转矩差值补偿到总目标转矩中去,则总的目标转矩可保持稳定。由此可见,在状态切换阶段,首先需要对发动机和电动机进行转矩预分配,确定两者的目标转矩,然后根据发动机和电动机的动态特性,对状态切换过程中出现的发动机转矩与预分配转矩的偏差进行适当的补偿。由此,补偿控制也就被包括在混合动力系统动态控制算法中。
综上所述,并联混合动力系统动态控制算法包括两方面的内容,即发动机、电动机目标转矩的预分配和动态切换过程中的补偿控制。补偿控制算法中,必须首先知道发动机的动态输出转矩,才能算出电动机需补偿的转矩,这正是上述发动机转矩估计问题。归结起来,并联混合动力系统动态控制算法可概括为“转矩预分配+发动机调速+发动机动态转矩估计+电动机转矩补偿控制”。其中,由于发动机调速控制只在部分工况下发生,故一般工况下动态控制基本的算法是“转矩预分配+发动机动态转矩估计+电动机转矩补偿控制”。发动机调速控制因发动机频域特性较为复杂,仿真很难达到预期效果,需进行大量调速试验研究,故本文不涉及发动机的调速仿真。
2 转矩预分配策略
转矩预分配策略属于混合动力系统的能量管理范畴。动态控制算法是以转矩波动不大为控制目标的,因此需要对发动机的转矩、电动机的转矩及总的需求转矩等进行识别。
转矩预分配研究主要包括两部分:①确定总需求转矩;②确定各工作模式下的目标转矩。鉴于逻辑门限控制策略的可靠性及较强的实现性,本文利用发动机与电动机的稳态效率脉谱(MAP)、挡位及蓄电池荷电状态(SOC)等来制订转矩预分配策略。
3 并联混合动力汽车发动机的转矩估计
如前所述,动态协调控制的方法主要以发动机的实时转矩反馈为基础,利用电动机的快速响应特性对发动机进行转矩补偿,达到总需求转矩不产生大的波动的目的。实现这一控制的前提是混合动力控制系统能实时反馈发动机的转矩。一般的发动机本身不提供发动机的转矩反馈,为达到混合动力系统动态控制的目的,必须对发动机进行稳态和动态转矩估计。
发动机的转矩估计方法目前主要有三种:基于发动机平均值模型、基于发动机曲轴瞬时转速波动和基于神经网络的转矩估计算法[3]。本研究通过AVL动态实验台测试了发动机的稳态特性和动态特性,并利用BP神经网络工具实现了对发动机稳态和动态转矩特性的估计。图2、图3所示分别为经训练得到的发动机稳态转矩估计网络和油门开度变化率在dα/dt=100%s—1时的动态转矩估计网络。
4 电动机转矩补偿控制策略
在并联混合动力系统中,转矩预分配策略按照汽车驾驶员的转矩需求预先确定发动机和电动机的目标转矩,以使汽车按照驾驶员意图运行。在并联混合动力系统工作模式不断变化的过程中,可能引起发动机和电动机目标转矩的突变,造成动力源动力输出不足或超调,同时可能引起传动系统动力传递不平稳,需要进行电动机补偿控制。当并联混合动力系统工作模式发生切换时,可以充分利用电动机对转矩控制指令迅速响应的特性来调节发动机对其目标转矩的响应程度。这样就构成了并联混合动力系统转矩动态控制策略的基本结构,如图4所示。
由于发动机目标转矩Te是按照当前状态下发动机稳态效率MAP图确定的,因此目标转矩是发动机在当前状态下的稳态转矩,也就是说分配给发动机的转矩是多能源控制总成预分配的转矩。根据该转矩,多能源总成控制器给发动机油门控制器发送指令,通过控制发动机节气门开度来输出转矩,这一节气门开度指令是由节气门开度计算模块计算确定的。根据预分配转矩,节气门开度模块计算出当前状态下发动机需开启的节气门开度;发动机转矩估计模型根据这一节气门开度估计出当前状态下发动机实际输出的转矩。若发动机在当前状态下为稳态,则输出转矩为稳态转矩(即目标转矩Te);若发动机在当前状态下为动态,则对应输出转矩为动态转矩Te_d。稳态和动态是根据发动机节气门开度变化率的大小来判断的,一般情况下,节气门开度变化率小于25%s—1时即认为是稳态,否则为动态。
为了满足总需求转矩即变速器输入端转矩Treq的需求,此时需要电动机输出剩余的转矩需求,即对电动机的实际需求转矩应该为Tm_d:

这样就可以充分利用电动机对转矩响应迅速且任何状态下零排放的特点,来保证并联混合动力系统中的发动机在当前状态下效率最优而排放较低,并且弥补发动机转矩响应延迟导致的转矩输出不足或超调的缺点。
5 动态控制基本算法仿真
根据算法研究的需要,本文应用MAT LAB/Simulink编制了整车仿真模型,并在此基础上进行了定工况和全工况仿真研究。
5.1 定工况仿真
在定工况过程中,并联混合动力系统的运行状态是预先设定的,即发动机和电动机的运行状态给定,不需要经过转矩预分配策略对两者的转矩进行确定。对采用转矩动态控制策略和不采用转矩动态控制策略的有关仿真结果进行对比,考察转矩动态控制策略在特定运行状态时的控制效果。定工况研究就是为了在特定工况中具体考察并联混合动力系统转矩输出的情况。本文仅以发动机驱动切换为纯电动的过程为例进行说明,假设切换前后传动系统传动比为1,驾驶员对动力系统的需求总转矩维持在45N˙m,则切换前后发动机和电动机的转矩变化情况如表2所示。
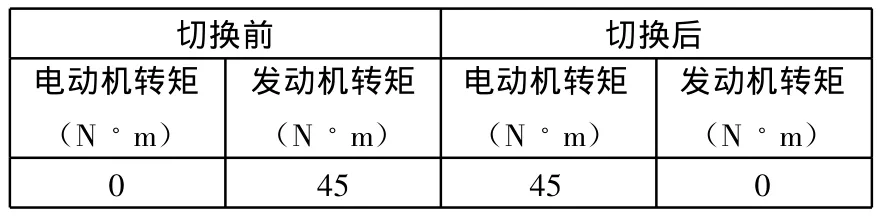
表2 发动机驱动切换为纯电动前后发动机和电动机目标转矩的变化情况
图5、图6所示分别为发动机驱动模式向纯电动模式切换过程中不采用动态控制算法和采用动态控制算法得到的结果。如图所示,t=8s时混合动力系统工作模式发生了切换。比较图5、图6可看出,不采用动态控制算法时,动力系统的实际输出总转矩在状态切换瞬间出现了很大的波动(图5a),进而使得加速度出现了大的波动(图5c),这样势必影响整车舒适性;而采用动态控制算法时,尽管动力系统实际输出总转矩在切换瞬间也出现波动,但波动很小(图6a),加速度也波动不大(图6c),整车舒适性较好。
没有转矩动态控制时(图5),在系统发出状态切换指令后,电动机即刻停机,输出转矩由45 N˙m骤减到0(图5b),同时要求发动机能及时输出同样的目标转矩45N˙m,但由于发动机对节气门信号响应滞后,导致发动机实际输出转矩不能跟踪其目标转矩45N˙m,动力系统实际输出的总转矩不能满足驾驶员的转矩需求,出现驱动转矩不足的现象,汽车加速度也随之急剧减小而产生较大的冲击,影响汽车动力传递的平稳性。
采用转矩动态控制时(图6),系统接到切换指令后,发动机接到45N˙m的目标转矩指令,但发动机实际输出转矩不能即刻达到45N˙m,只能由0逐渐增大到45N˙m;另一方面,电动机的输出转矩也没有直接由45N˙m减到0,而是利用其对控制指令响应的迅速性,根据发动机转矩输出情况,逐渐递减到0(图6b),从而保证了发动机和电动机转矩之和(即动力系统实际输出的总转矩)能够较好满足驾驶员转矩的需求,使得在工作模式发生切换的过程中汽车加速度变化比较平稳。可见,在并联混合动力系统定工况工作模式切换过程中转矩动态控制策略较好地保证了并联混合动力系统对动力性的要求,同时也可以保证动力传递平稳。
5.2 全工况仿真
全工况仿真是指对驾驶员模块中输入踏板行程参数后,随踏板行程、车速以及蓄电池SOC值等参数的变化,并联混合动力系统经历若干个连续状态变化的过程进行仿真。在全工况仿真过程中,发动机、电动机目标转矩按照混合动力系统转矩管理策略确定,并相应地确定混合动力系统的运行模式;转矩动态控制策略应能保证在混合动力系统工作模式发生切换的过程中,发动机和电动机输出转矩之和(即变速器输入转矩)满足驾驶员对转矩的需求,并保证转矩传递平稳。全工况仿真包括加速过程和减速过程,本文仅以加速过程的全工况仿真进行说明。图7和图8分别示出了不采用转矩动态控制策略和采用转矩动态控制策略时的仿真结果。驾驶员加速踏板的行程在第2s时以30%s—1的变化率增大,在5.33s时行程达到最大。随着踏板行程的持续增大,混合动力汽车的工作状态在4.67s时由纯电动切换为发动机和电动机共同驱动。
由图7a、图8a可看出,除变速器换挡期间发动机和电动机转速有差别外,其他期间转速曲线差别不大,这是因并联混合动力耦合系统转速存在1∶1的关系,使发动机和电动机转速相等。
图7b和图8b、图7c和图8c反映了车速和整车加速度的变化情况。由于采用了转矩动态控制,在并联混合动力系统工作模式发生切换的第4.67s时刻,图8b的车速曲线比图7b的车速曲线相应部分平滑。这是由于在混合动力系统工作模式切换时,电动机输出转矩有效地弥补了发动机转矩输出的不足,因而使得图8c中的汽车加速度曲线在第4.67s时较图7c的汽车加速度曲线相应部分振荡幅度小得多。
图7d中,电动机首先启动,提供系统所需转矩,在第4.67s时由于电动机提供的转矩不能满足系统的转矩需求,因此发动机启动,参与提供驾驶员的需求转矩,混合动力系统的工作模式由纯电动切换为联合驱动,此后混合动力系统一直工作于联合驱动的状态。由于发动机对转矩需求信号响应的滞后,因此发动机输出的转矩变化较慢,但电动机输出转矩迅速按照整车控制策略的分配规则迅速减小。图8d中,由于运用了转矩动态控制策略,因此发动机输出转矩增大较慢;由于发动机参与提供系统所需转矩,电动机输出转矩有所减小,但由于电动机此时输出的转矩中还有应该包含发动机转矩输出的不足部分,因此电动机转矩输出减小速度较慢,这样在满足驾驶员转矩需求的前提下,同时也保证了转矩输出的平稳。
由图7e、图8e可以看出,除去换挡引起的转矩波动以及工作模式切换引起的转矩波动外,两转矩曲线吻合较好,即并联混合动力系统能够较好地满足驾驶员需求转矩。在混合动力系统工作模式发生切换的第4.67s时刻,不采用动态控制策略时实际输出总转矩波动较大(图7e),而采用动态控制策略后,其实际输出总转矩变化平稳(图8e),达到了动态控制的目的。
6 结论
发动机稳态特性和动态特性存在较大差异,使得并联混合动力电动汽车在状态切换过程中,因发动机实际输出转矩与预分配的目标转矩存在差异而影响整车舒适性。为此,本文对混合动力系统状态切换过程进行分析,以切换过程中总需求转矩不发生大的波动为目标,利用电动机响应快的特点,提出了并联混合动力系统“转矩预分配+发动机调速+发动机动态转矩估计+电动机转矩补偿控制”的动态控制算法。为验证算法的有效性,搭建了整车仿真平台,并分别进行了采用动态转矩控制算法和不采用动态转矩控制算法的定工况和全工况仿真。仿真结果表明,上述动态控制算法能有力地解决并联混合动力汽车在状态切换过程中转矩波动大的问题,大大提高了状态切换过程中整车的舒适性。
[1]孙逢春,何洪文.混合动力车辆的归类方法研究[J].北京理工大学学报,2002,2(1):40-44.
[2]Chan C C.The State of the Art of Electric and Hybrid Vehicles[J].Proceedings of IEEE,2002,90(2):247-275.
[3]童毅,张俊智,欧阳明高.混合动力汽车扭矩管理策略[J].汽车工程,2003,43(8):33-36.
[4]Niels J S,Mutasim A S,Naim A K.Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic[J].Control Engineering Practice,2003,11(2):171-177.
[5]Huang Miaohua,Yu Houyu.Optimal Control Strategy Based on PSO for Powertrain of Parallel Hybrid Electric Vehicle[C]//IEEE International Conference on Vehicular Electronics and Safety,ICVES.Piscataway:IEEE Computer Society,2006:352-355.
[6]Wu J,Zhang C H,Cui N X.PSO Algorithm—based Parameter Optimization for HEV Powertrain and Its Control Strategy[J].International Journal of Automotive Technology,2008,9(1):53-69.
[7]Jeon Soon—il,Jo Sung—tae,Park Yeong—il,et al.Multi—mode Driving Control of a Parallel Hybrid Electric Vehicle Using Driving Pattern Recognition[J].Journal of Dynamic System,Measurement and Control,2002,124(3):141-149.
[8]胡红斐,黄向东,罗玉涛,等.一种混联式HEV瞬时优化监控策略的研究[J].中国机械工程,2006,17(6):649-653.
[9]童毅.并联式混合动力系统转矩协调控制[D].北京:清华大学,2004.
[10]王伟华.并联混合动力汽车的控制[D].长春:吉林大学,2006.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
制造技术与机床(2017年6期)2018-01-19 02:41:07
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
电源技术(2015年9期)2015-06-05 09:36:06
