
基于Ansoft的单相开关磁阻发电机系统仿真与试验
2010-11-21 07:59晏桂林
电机与控制应用 2010年7期
晏桂林,丁 文
(1.湖南省电力公司试验研究院高压所,湖南长沙 415000;2.西安交通大学,陕西西安 710049)
0 引言
开关磁阻发电机(Switched Reluctance Generator,SRG)作为一种新型结构的电机,在不改变控制器和电机本体只需要改变控制策略的情况下就可以在四象限运行,非常灵活。但从整个研究方向和力度来看,开关磁阻电机(Switched Reluctance Motor,SRM)自20世纪70年代问世以来,多集中于研究开发调速电动机,极少涉及发电方面的研究,而单相SRG的研究则更少。单相SRG作为发电机运行具有自身的许多优势:(1)结构简单可靠,适用于宽转速范围内的发电系统,单相多极发电机还具有很强的发电容错能力[1-2];(2)控制器简单,主电路只需要一组功率开关管和二极管,有利于降低发电系统成本,简化控制算法[3];(3)对于带蓄电池的离网型发电系统,单相SRG输出的脉动电流有利于消除蓄电池的电化学极化,实现优化充电。
Ansoft公司的Maxwell 2D是一个功能强大、结果精确、易于使用的二维电磁场有限元分析软件。本文采用Maxwell 2D软件建立单相SRM、功率变换器和驱动电路模型,完成了单相SRM驱动系统的仿真研究并进行了试验分析。
1 Ansoft二维瞬态场仿真模型的建立
1.1 单相SRG工作原理及仿真模型
单相SRG是一种双凸极结构的磁阻电机,定子上有集中绕组,转子既无绕组又无永磁体。图1为典型的单相8/8极SRG系统,图中8个绕组拓扑结构采用全部并联的形式,绕组中电流方向如箭头所示。
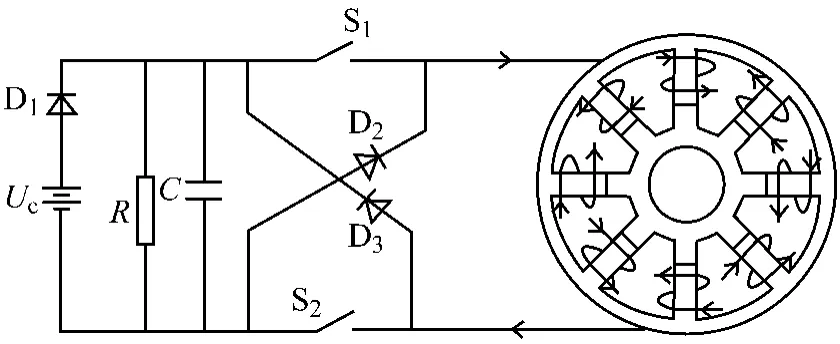
图1 单相8/8极SRG系统
磁阻电机的转子由原动机拖动旋转,通过转子位置传感器实现位置闭环,控制电机实现励磁和发电续流状态转换。主开关导通时,相绕组就形成电流,之后关断主开关,由于绕组中电流不会立即消失,电感储能将继续循续流二极管流通,并向负载或蓄电池回馈电能。磁阻电机的凸极效应使相绕组成为有源线圈传递能量,实现发电状态工作。表1给出了仿真对象的主要参数。
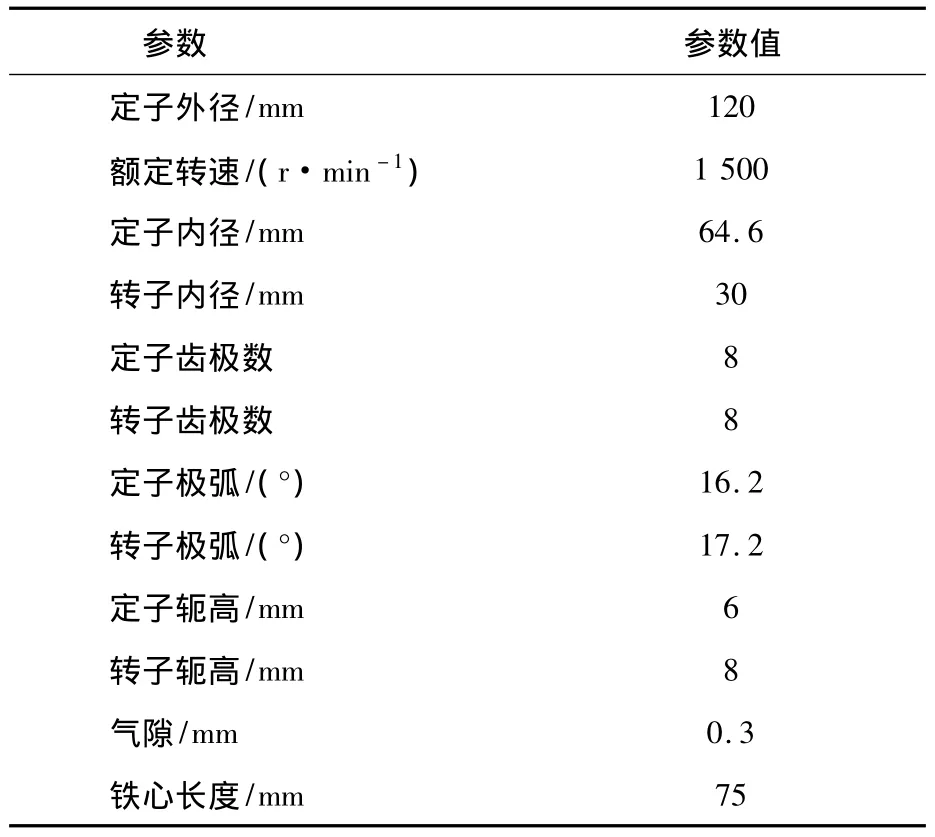
表1 样机的额定数据及结构参数
利用Ansoft软件中的Maxwell 2D模块建立单相SRG的二维有限元模型,建模过程如下[4]:
(1)选择求解平面;
(2)确定电机结构尺寸数据,画出电机模型;
(3)确定电机材料属性;
(4)确定有限元计算的边界条件和外加激励源;
(5)确定计算过程中是否考虑各种损耗;
(6)确定动态参量,包括运动边界、外加载荷、时间步长等。
1.2 功率变换器模型
功率变换器承担着励磁功率输入与发电功率输出的双重任务,Maxwell 2D中的功率变换器模型如图2所示。其中S1、S2为电压控制型开关,其开通、关断由控制电路决定;W1、W2为电流控制型开关,控制变量为电流I,其目的是为了实现电流斩波控制算法,将回路电流控制在可预见的范围之内,实现对负载的可靠供电。
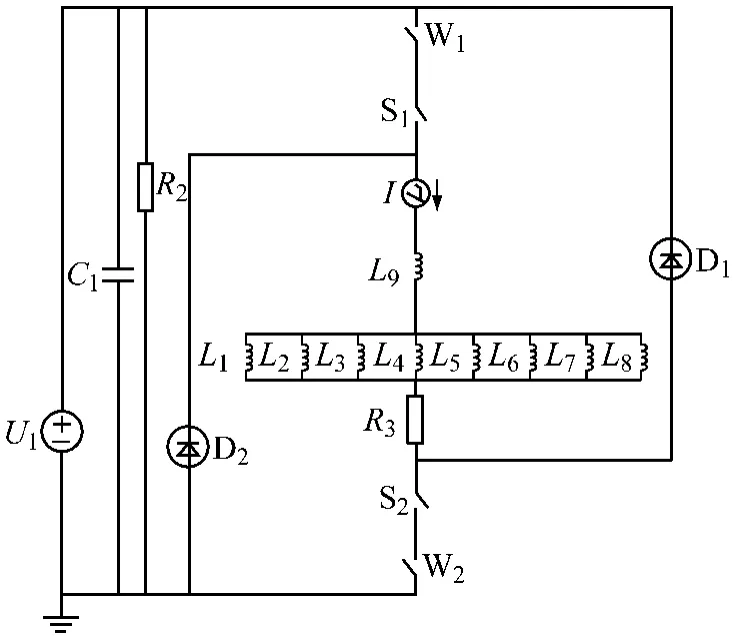
图2 功率变换器模型
1.3 驱动电路模型
SRG系统的运行依赖于转子的位置信号,从而为功率开关提供正确的开通、关断信号。由于Anosft带有位置变量P,可以利用变量P得到转子运行的位置。利用Maxwell 2D提供的电路元件建立简单的驱动电路模型,如图3所示。电压控制开关S1~S2的通断受到驱动电压源U2控制,驱动电压源为位置变量P的函数,产生脉冲电压信号,该信号波形如图4所示。
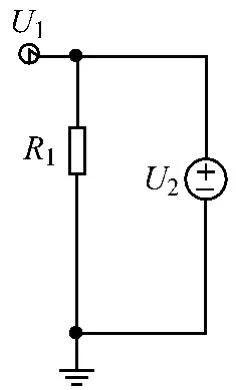
图3 驱动电路模型
2 系统仿真结果及其分析
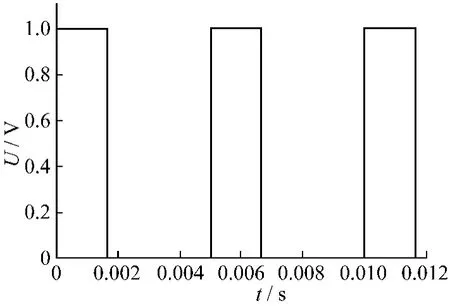
图4 驱动信号仿真波形
在Maxwell 2D中建立瞬态仿真模型。SRM采用单相8/8极结构,功率变换器采用不对称半桥电路,控制功率开关使得SRM在励磁和发电两种状态之间不断转换。定义定子齿极轴线与转子槽轴线重合时为0°(机械角度,下同),称为不对齐位置,则当定子极中心线与转子极中心线重合时的位置角度为22.5°,此时称为对齐位置。以45°机械角度为一个开关周期,对样机进行了仿真分析,得到了对齐位置和不对齐位置处的电机磁场分布,以及静态电磁参数仿真结果和动态性能仿真结果。
2.1 静态磁场分布
在外施激励恒定为5 A的情况下,可以仿真得到单相SRG在对齐位置和不对齐位置下的磁场分布图,如图5所示。
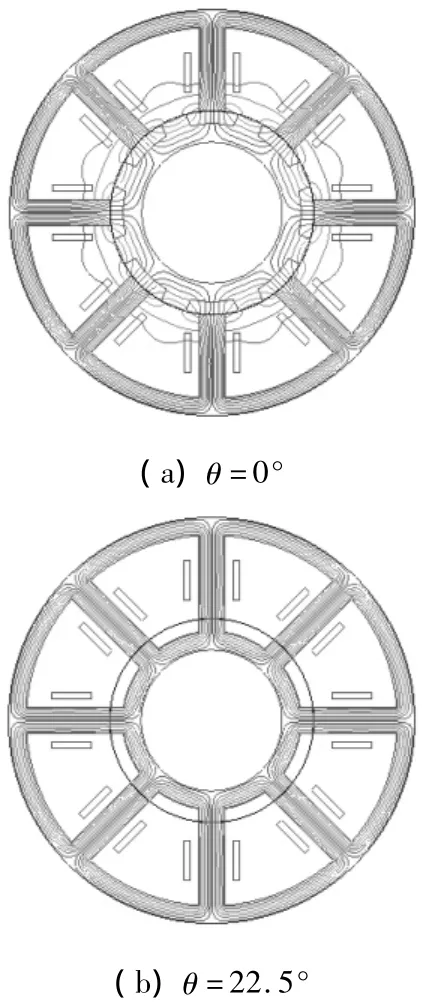
图5 不同位置电机磁场分布图
从图5中可看到当单相SRM相绕组通电流时,电机的磁通主要分三个部分:一是定子绕组磁极经气隙达到转子极的主磁通;二是经极间气隙达到定子轭部的漏磁通;三是从励磁极经气隙达到相邻绕组的相间漏磁通。当转子位置处于位置角θ=0°时,由于气隙磁阻较大,所以漏磁通也较大。当定、转子极完全重合(θ=22.5°)时,定、转子极极身的局部饱和最为严重,此时定、转子极尖的磁密最大。
2.2 静态电磁特性
在Maxwell 2D模块下,很容易得到单相SRG的静态电磁特性,如图6所示。其中图6(a)为电机的磁链特性,图6(b)为电机的电感特性。
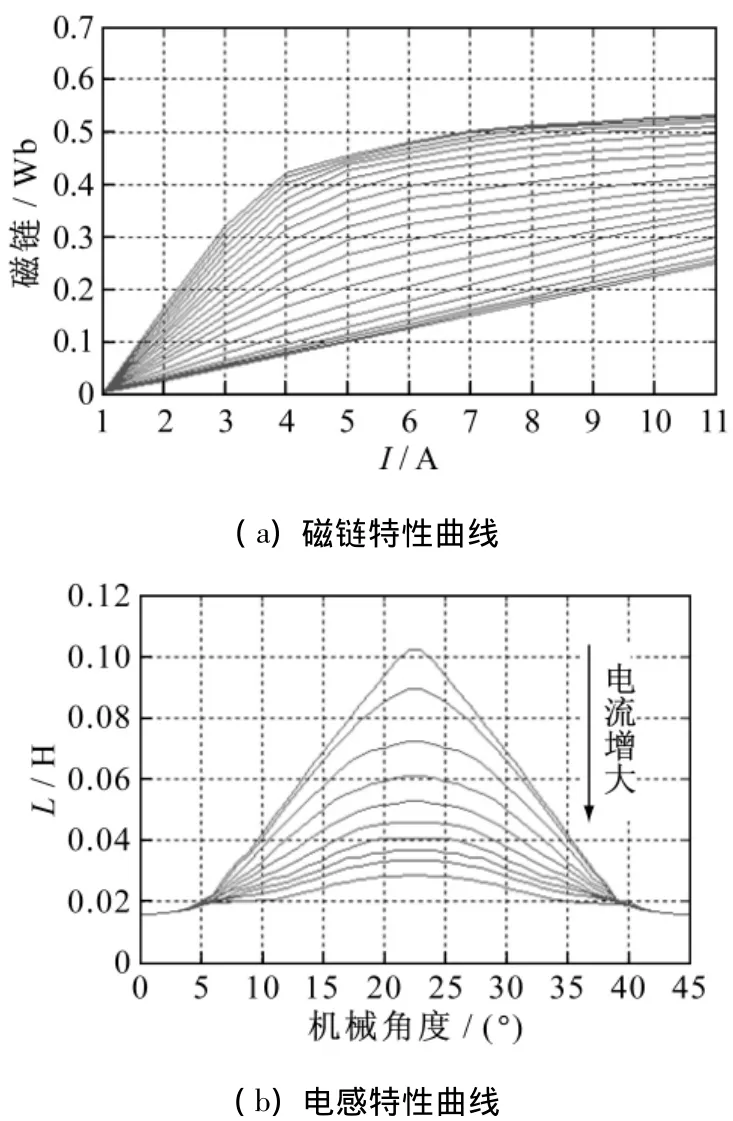
图6 静态电磁特性曲线
2.3 不同控制方式下动态仿真结果
为了对比研究不同控制方式、不同转速条件下电机的发电特性,分别采用角度位置控制和电流斩波控制策略对单相SRG进行仿真分析。
(1)在开通角 θon=11.5°,关断角 θoff=26.5°,转速为1 500 r/min条件下进行角度位置控制算法下的动态仿真,图7为该仿真的电机性能波形。其中:(a)为相电流波形;(b)为磁链波形;(c)为反电势波形;(d)为转矩波形。
(2)在开通角 θon=11.5°,关断角 θoff=26.5°,转速为1 000 r/min条件下进行角度位置控制算法下的动态仿真,图8为该仿真的电机性能波形。其中:(a)为相电流波形;(b)为磁链波形;(c)为反电势波形;(d)为转矩波形。
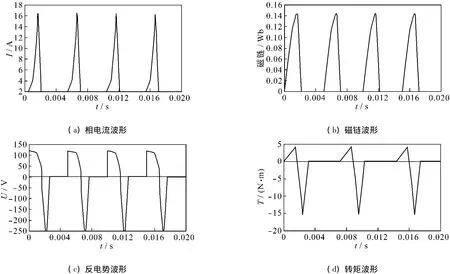
图7 角度位置控制下电机性能波形(n=1 500 r/min)
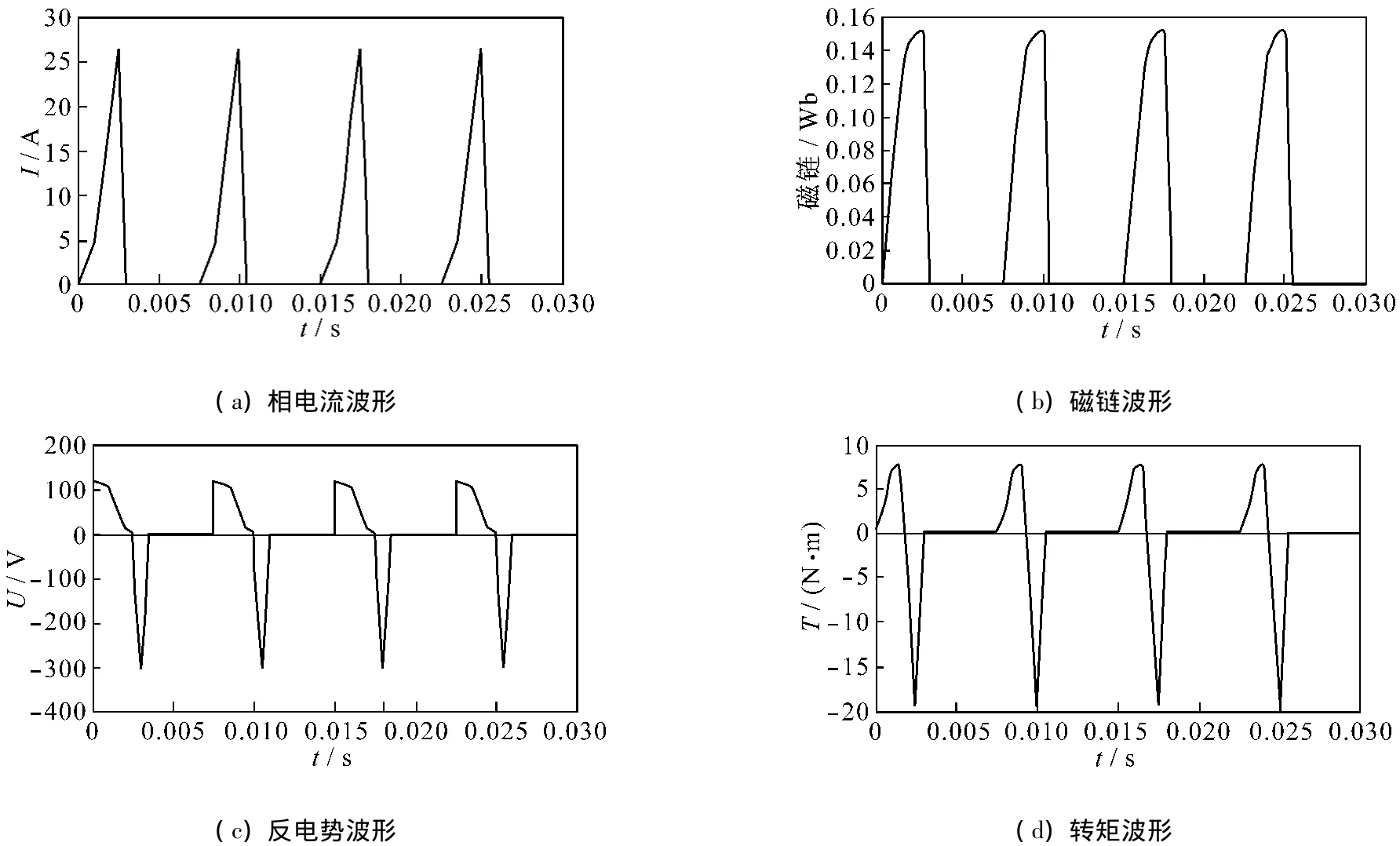
图8 角度位置控制下电机性能波形(n=1 000 r/min)
(3)电流斩波控制(CCC):在开通角θon=11.5°,关断角 θoff=26.5°,转速为 1 500 r/min,电流斩波控制,参考电流值Iref=2.5 A,滞环电流幅值为0.2 A,图9为电流斩波控制下电机性能波形。其中:(a)为相电流波形;(b)为磁链波形;(c)为反电势波形;(d)为转矩波形。
3 样机试验结果及分析
在前文理论分析的基础上,设计了一套小功率单相开关磁阻发电试验样机系统,样机数据如表1所示。该系统由原动机、单相SRG和控制器组成。原动机采用直流电动机,负责为单相SRG提供所需的机械能;单相SRG则负责将原动机输入的机械能转化为电能,实现发电运行。
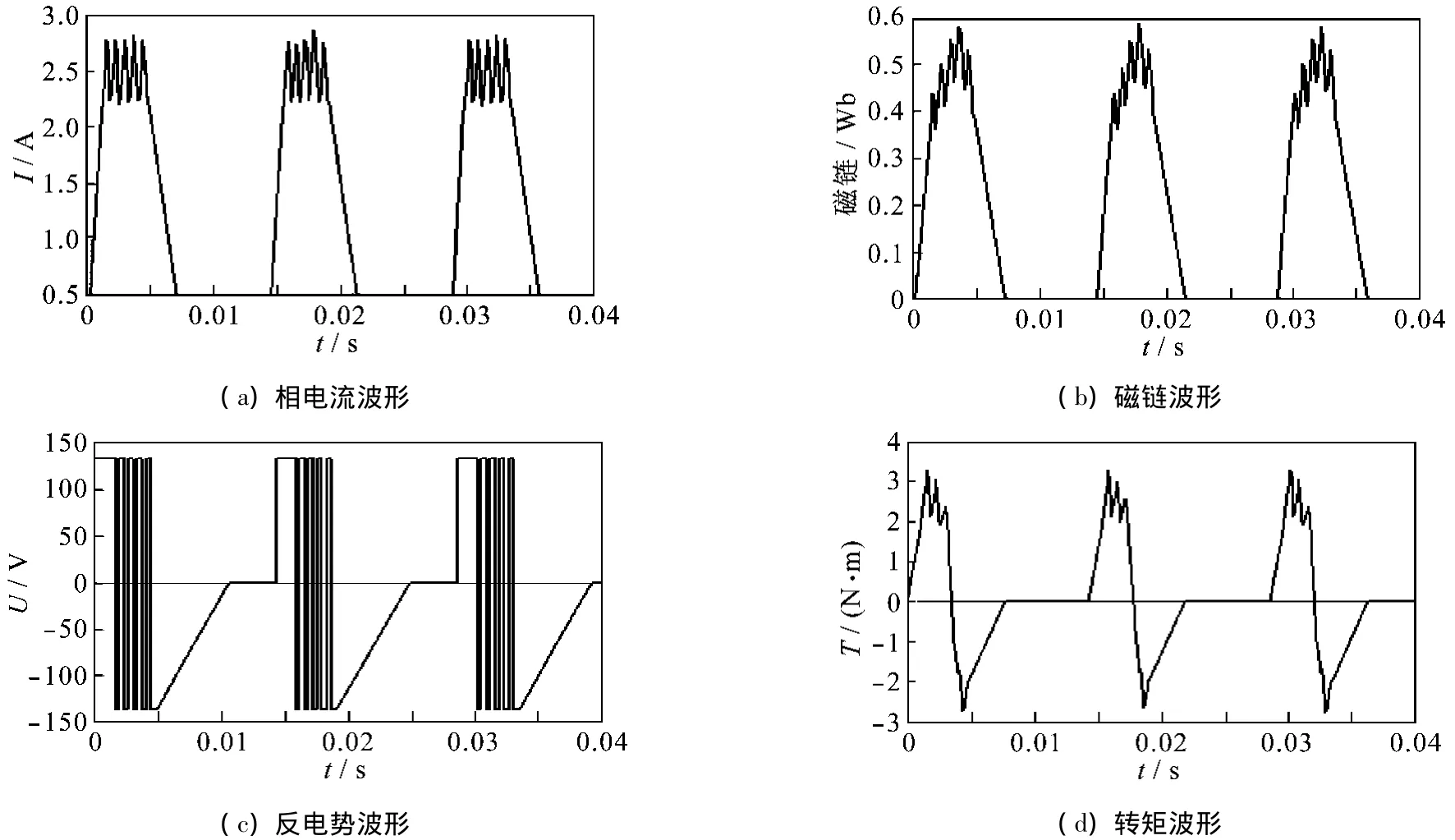
图9 电流斩波控制下电机性能波形
为了考察开通、关断角对发电性能的影响并验证理论分析的正确性,将电机拖动到发电转速1 500 r/min,固定负载不变,针对不同开关角试验,观察试验波形。固定关断角θoff=30°,调节开通角θon的相电流和母线电压波形如图10所示,固定开通角θon=15°,调节关断角θoff的相电流和母线电压波形如图11所示。
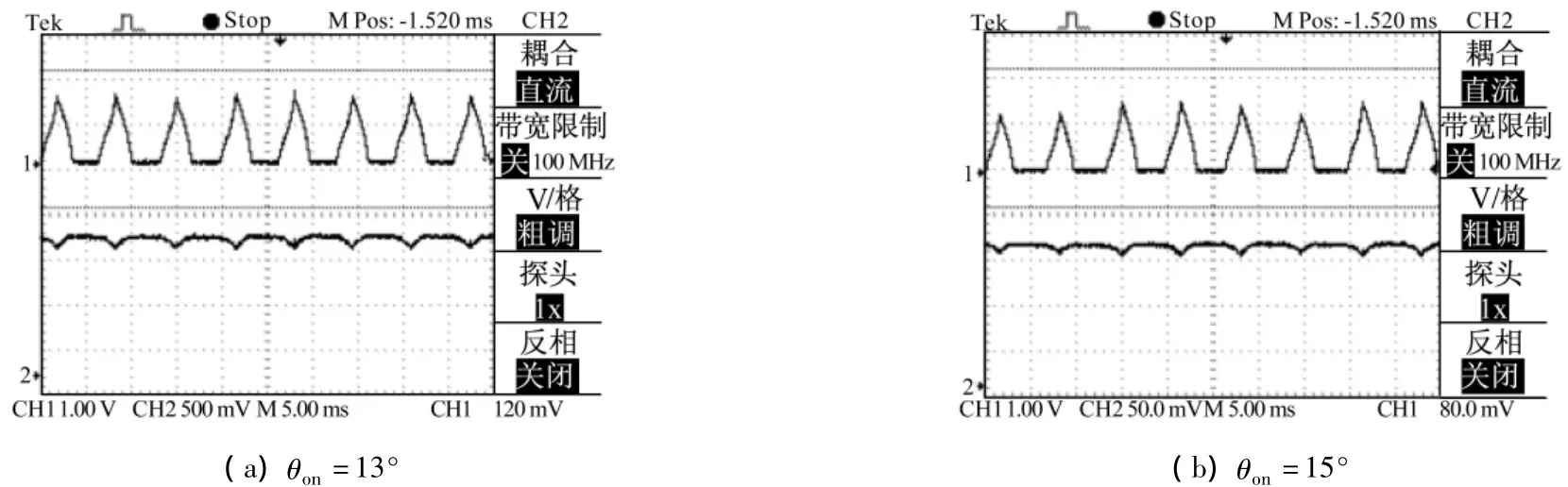
图10 固定关断角θoff=30°,调节开通角θon时相电流和母线电压波形
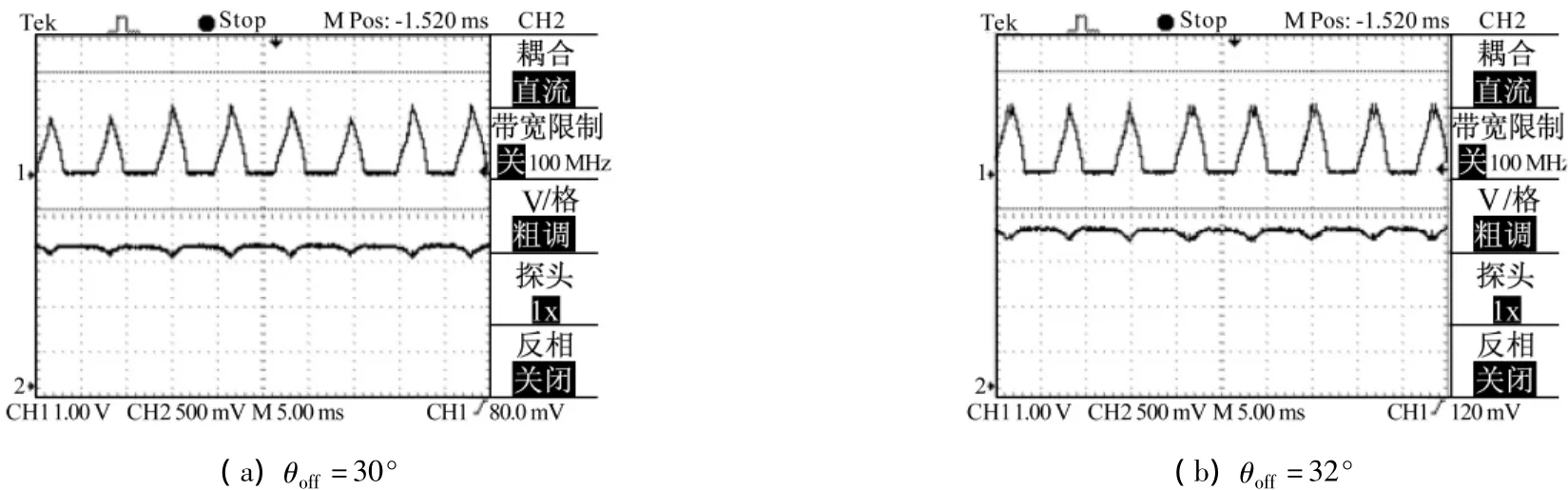
图11 固定开通角θon=15°,调节关断角θoff时相电流、母线电压波形
图10、11中示波器通道1测量的是电流值,每一格代表10 A,通道2测量的是电压值,每一格代表60 V。从图10、11可以看出单相SRG实测电流波形和理论分析基本吻合,验证了理论分析的正确性。
4 结语
本文在Ansoft Maxwell 2D环境下建立了单相SRG的仿真模型,完成了对单相SRG系统的磁场、静态电磁特性,以及不同控制方式下的动态特性仿真研究。仿真结果准确反映了单相SRG的磁场分布,为电机结构参数优化设计提供依据。其中电磁参数的仿真分析所得到的电磁特性参数,为下一步在SIMPLORER环境下的系统仿真提供了参数准备;电流和磁链反映了单相SRG的基本性能,尤其为如何选择最优的开通角和关断角提供了依据。在此基础上设计了一套小功率开关磁阻发电试验系统,试验系统的试验结果印证了理论仿真的结果。
[1]Tadashi sawata,Philip C,Kjaer CC,et al.A study on operation under faults with the single-phase SR generator[J].Trans on Industry Applications,1999,35(4):1136-1141.
[2]Tadashi sawata,Philip C,Kjaer CC,et al.Fault-tolerant operation of single-phase SR Generator[J].Trans on Industry Applications,1999,35(5):774-781.
[3]吴韬.小功率开关磁阻发电系统的理论研究与实践[D].南京:南京航空航天大学,2003.
[4]周会军,丁文,鱼振民.基于Ansoft Maxwell的开关磁阻电机仿真研究[J].微电机,2005,38(6):10-12.
[5]杨泽斌,黄振跃,张新华.基于 Ansoft/Maxwell 2D的开关磁阻电机起动性能仿真分析与实验研究[J].微电机,2009,42(8):19-22.
[6]杨丽伟,张奕黄.基于Ansoft的开关磁阻电机建模与仿真[J].电机技术,2007(3):13-16.
猜你喜欢
微电机(2022年1期)2022-03-21
电子与封装(2021年7期)2021-07-29
防爆电机(2021年4期)2021-07-28
电子制作(2016年11期)2016-11-07
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
电测与仪表(2015年11期)2015-04-09
电机与控制应用(2015年2期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年21期)2014-04-04
