
基于联合仿真的四轮转向汽车控制策略研究
2010-11-09 08:18:02邓召文
重庆交通大学学报(自然科学版) 2010年6期
冯 樱,邓召文,高 伟
(湖北汽车工业学院汽车工程系,湖北十堰442002)
四轮转向(4WS)是汽车工业的高新技术之一,是主动底盘控制技术研究的关键。4WS汽车通过后轮直接参与对汽车侧向及横摆运动的控制,不仅减少了转向力产生的滞后,而且能独立地控制汽车的运动轨迹与姿态,使汽车的方向角与姿态角重合,改善了车辆高速时的操纵稳定性和低速时的机动灵活性[1]。
目前,4WS所采用的控制策略基本都是基于线性二自由度模型,围绕着使车辆质心的侧偏角为0,以提高侧向稳定性。但车辆状态和外界干扰的不确定性直接影响控制系统设计,控制性能往往难以达到设计要求[2]。对4WS控制系统的研究已逐渐从线性向非线性领域过渡。笔者在ADAMS中建立四轮转向的多刚体整车动力学模型,进行了四轮转向汽车控制策略研究,提出了比例前馈加模糊反馈的后轮转角控制策略,在Matlab/Simulink设计了四轮转向综合控制器,并基于ADAMS和Matlab联合仿真技术进行了仿真试验。结果证明本文提出的控制方法和策略是有效的,为下一步进行实车试验,开展转向与制动的集成研究奠定基础。
1 整车多刚体动力学模型
根据国产某轿车提供的数据参数,运用ADAMS软件,通过面向对象的建模方法,首先在模板建立系统的运动部件、机构约束以及与外部的信息通讯,再创建子系统,最后装配成整车[3]。所建立的整车模型包括:
1)前悬架子系统:麦弗逊独立悬架。
2)前轮转向子系统:齿轮齿条式转向系统。前轮转角由驾驶员通过转向盘及转向传动机构控制。
3)后悬架及转向子系统:带齿轮齿条式转向机构的多连杆式悬架。在多连杆式悬架子系统模板[4]中增加左右转向横拉杆、转向齿条和齿条壳体4个部件,并定义相应的约束副。通过在转向齿条和齿条壳体之间的移动副上定义一个位移执行器,由控制器控制,以实现后轮主动转向控制。若位移执行器输入为0,整车模型变为前轮转向模型。
4)车身子系统:建立在刚性底盘模板的基础上,整车其他子系统直接或间接与之连接。车辆的质量、转动惯量以及静态载荷分布在该子系统中进行定义。
5)动力总成系统:四缸直列发动机,发动机前横置前轮驱动。
6)制动子系统:前、后轮制动器采用液压盘式制动器。
7)轮胎子系统:轮胎模型利用国际上通用的Magic Formula模型,它是用三角函数的组合公式拟合轮胎试验数据,轮胎模型的一般表达式为:

式中:Y(x)可以是纵向力、侧向力或回正力矩,自变量x可以在不同的情况下分别表示轮胎的纵向滑移率s、侧偏角α、外倾角γ和垂直载荷Fz;系数B、C、D、E由轮胎的垂直载荷和外倾角等来确定。
整车模型建成后,通过与实车实验数据对比,对所建模型进行不断地调试和仿真计算,验证仿真模型的有效性,使其最终达到工程所要求的精度。整车主要参数列于表1,隐藏了车身几何的整车模型(图1)。
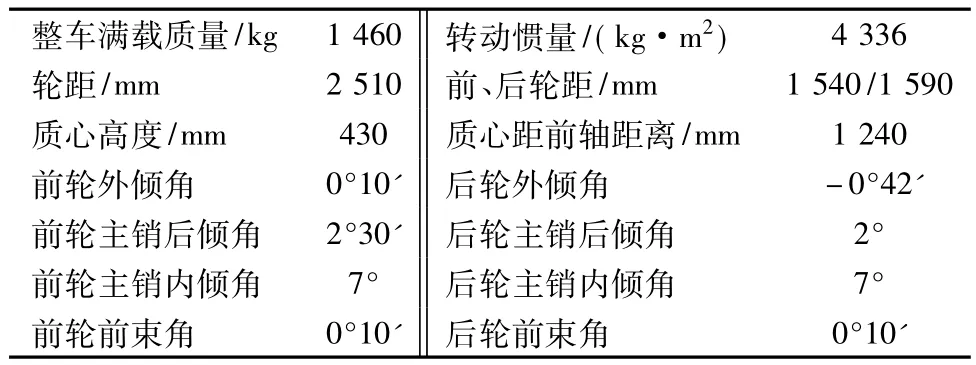
表1 整车模型主要参数Tab.1 Main parameters of vehicle model

图1 整车模型Fig.1 Vehicle model
2 四轮转向控制系统设计
2.1 后轮转向控制策略
4WS的显著优势是高速转向时通过主动实现汽车后轮转向,有效改善汽车的操纵稳定性。由于横摆角速度和侧偏角是描述汽车动力学稳定性的最佳状态变量,所以通过比较横摆角速度和侧偏角与理想值之间的差值就可以确定出汽车行驶状态的稳定程度[5]。早期四轮转向控制目标大多是控制质心侧偏角为0,使汽车在中、低速时有良好的机动灵活性,但在高速时出现横摆率稳态增益减小、相位滞后增加等问题,导致车辆的不足转向过多[6]。H2/H∞多目标综合控制具有较高鲁棒性,较好地改善了车辆的操纵稳定性,但要测量多个状态量,特别是无法用合理成本测得质心侧偏角[7]。以侧偏角及车身横摆角速度作为输入的模糊控制能较大地改善车辆的操控特性,并具有较强的鲁棒性[8]。但同样存在质心侧偏角测量问题,大大减弱了算法的实用性。比例于前轮转角加比例于横摆角速度控制的后轮转向控制方法可使综合性能得到优化[9]。
由于比例于前轮转角的后轮控制无论在高速还是低速,质心侧偏角在经过短暂超调后总能保持为0[10],故笔者控制方案保留比例于前轮转角的后轮转角前馈控制;考虑到车辆的侧偏角和横摆角速度是相互耦合的,采用比例前馈控制后,汽车质心侧偏角已得到控制,鉴于实际的质心侧偏角不易测得,故选用汽车的横摆角速度作为反馈的控制变量,对后轮进行模糊反馈控制。即控制策略为比例前馈控制加基于横摆角速度误差及其变化率的模糊反馈控制。通过前馈控制提高汽车运动状态的瞬态响应性能,模糊反馈控制用于适应整车多刚体多力学模型的非线性和时变性,以实现汽车运动状态对理想参考模型的动力学响应良好的跟踪性。后轮转角总的控制表达式为:

汽车四轮转向控制的总体方案如图2。图2中,由ADAMS模块输出的整车横摆角速度作为Matlab/Simulink控制系统的反馈输入,与参考模型输出的理想横摆角速度进行比较,两者的误差及其变化率作为模糊控制器的输入,得到模糊控制器输出U后,再与前馈比例控制量kδf一同构成ADAMS整车模型中后轮转向齿条的输入量。
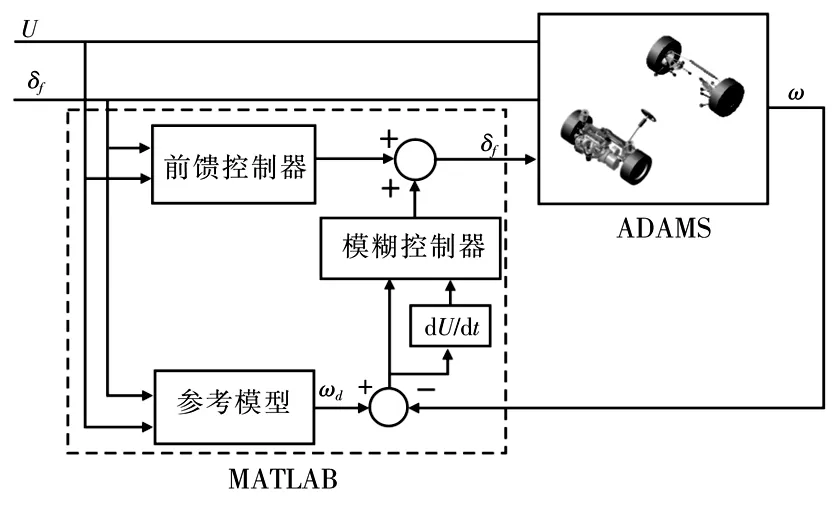
图2 四轮转向控制系统Fig.2 Structure of four-wheel steering control system
2.2 前馈控制器
比较典型的前馈型四轮转向系统采取的是0质心侧偏角控制策略[11]。即:
式中:a为质心距前轴的距离;b为质心距后轴的距离;L为轴距;m为整车质量;kf、kr为前、后车轮的侧偏刚度,仿真时取车辆静载时由轮胎魔术公式计算所得的侧偏刚度;u为汽车的车速。
2.3 参考模型
由于线性二自由度车辆模型,可以反映驾驶员的转向输入与横摆角速度之间的线性关系,因此有文献把线性二自由度车辆的转向特性作为汽车理想的转向特性。根据线性二自由度参考模型[12],由式(4)计算得到理想转向横摆角速度:
式中:K为汽车的稳定性因数;其它符号意义同前。
2.4 模糊控制器
以横摆角速度误差和误差变化率为输入、后转向齿条位移为输出的模糊控制器采用mandani推理法作为模糊控制算法,模糊控制器如图3。
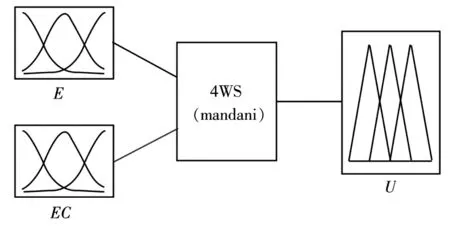
图3 模糊控制器Fig.3 Fuzzy controller
输入和输出语言变量的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB),其中:NB、NM、NS 分别表示负大、负中和负小;ZE表示0;PS、PM、PB分别表示正小、正中和正大。隶属度函数取常用的三角形函数,该隶属函数运算简单,有利于实时混合仿真,且又能满足控制精度要求。输入和输出论域范围,通过实际仿真得到。输入输出参变量的论域和隶属度函数如图4。在模糊数远离0时,其对应的词汇数尽量少些,使控制器灵敏度增强;模糊数靠近0时,其对应的词汇多些,以保证控制的鲁棒性,实现精细控制。
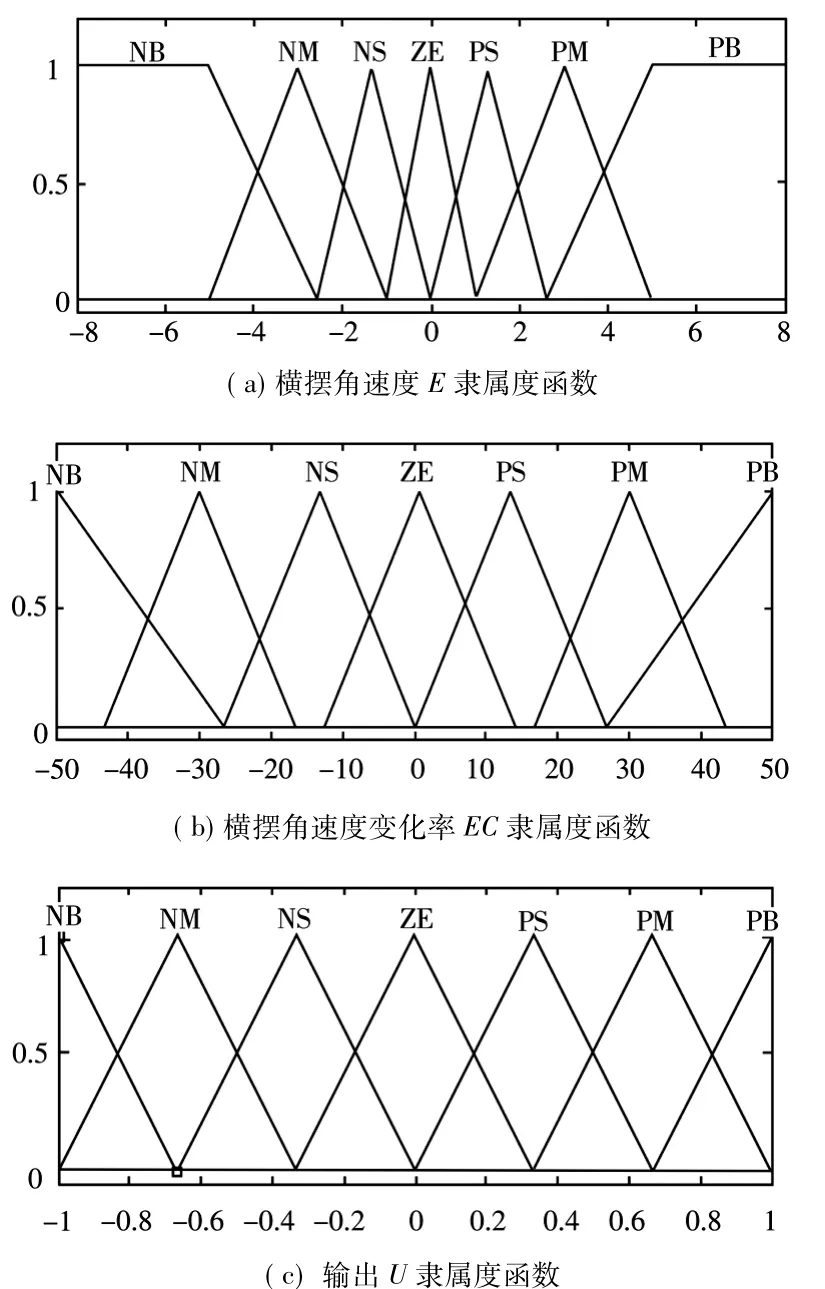
图4 输入和输出变量隶属度函数Fig.4 Membership functions of input and output variables
当横摆角速度误差E为负大、误差的变化EC为负大时,误差有变负大的趋势,要求控制器的输出量U为正大,尽快跟上设定值的变化;当误差E为正大、误差的变化EC为正大时,看到误差有变正大的趋势,而且此时超调量也有变大的趋势,于是要求控制器的输出量U为负大,尽快减少超调量。
模糊控制器的部分模糊控制逻辑如下:
1.IfEis NB andECis NB thenUis PB;
4.IfEis NB andECis ZE thenUis PB;
35.IfEis PS andECis PB thenUis NM。
控制规则见表2。
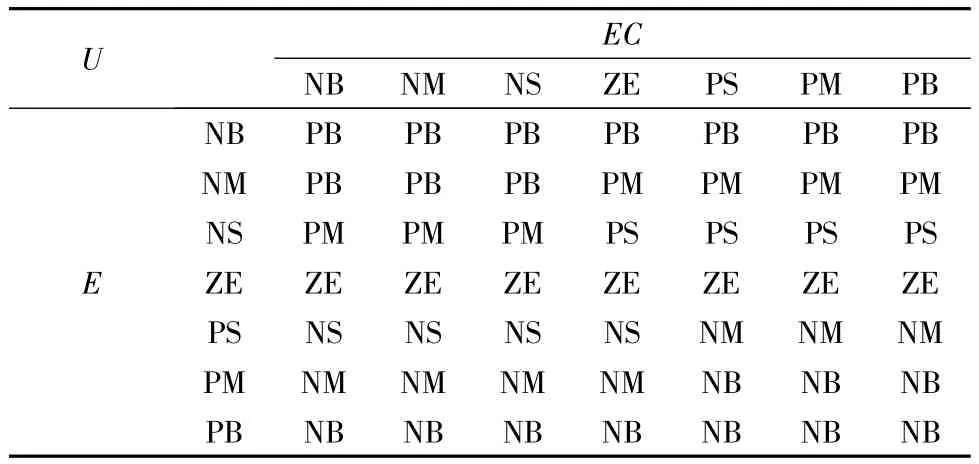
表2 模糊控制规则Tab.2 Table of fuzzy controller rules
3 ADAMS与Matlab联合仿真
为了验证系统建模、控制策略和仿真算法的合理性和有效性,进行了2种高速典型工况仿真试验。
3.1 工况1
工况1是在附着系数为0.8路面作单移线运动,其中车速为100 km/h,前轮正弦输入幅值为4 deg,频率为0.33 Hz。图5为作单移线运动时前轮转向(FWS)汽车、比例前馈四轮转向汽车和比例前馈加模糊反馈四轮转向汽车仿真结果对比曲线。
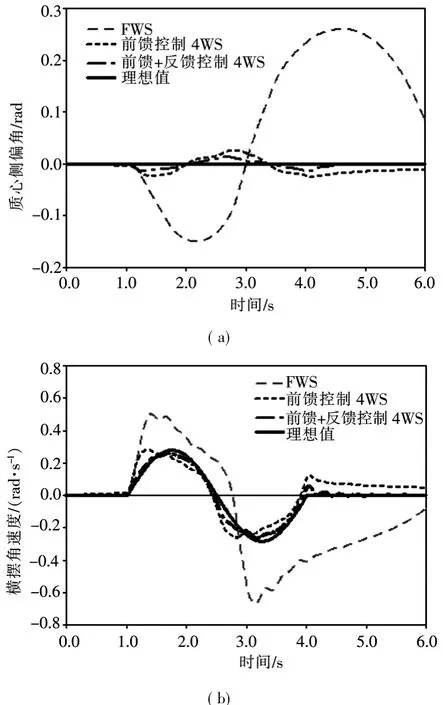
图5 正弦转向输入下的响应Fig.5 Responses under sine steering input
由图5(a)、(b)可见,在工况1下,前轮转向汽车的质心侧偏角和横摆角速度都严重偏离理想值,出现失稳现象。采用比例前馈从理论上可以得出质心侧偏角恒为0的解析解,但由于4WS多体整车模型中考虑了轮胎的非线性和过程的时变性等因素的影响,质心侧偏角虽得到较好的控制,并不为0;横摆角速度相对于理想值也有一定的偏差。而采用比例前馈加模糊反馈控制的4WS汽车,由于模糊控制器的输入量为横摆角速度误差及变化率,从图5(b)可见,其横摆角速度与理想值极为接近;同时质心侧偏角的控制也优于单纯的比例前馈,即综合控制效果良好。
3.2 工况2
工况2是在附着系数为0.8的路面上,车速为100 km/h,汽车作转向盘为角阶跃(前轮转角为4°)输入的运动。图6为该工况下的仿真结果对比。
由图6(a)、(b)可见,前轮转向汽车在工况2下,质心侧偏角和横摆角速度都存在超调,将产生转向抖动现象。采用比例前馈四轮转向汽车的质心侧偏角和横摆角速度均得到较好控制,且峰值减小,稳定时间缩短。而采用比例前馈加模糊反馈控制策略的四轮汽车无论是横摆角速度还是质心侧偏角的控制又明显优于比例前馈策略的四轮转向汽车。
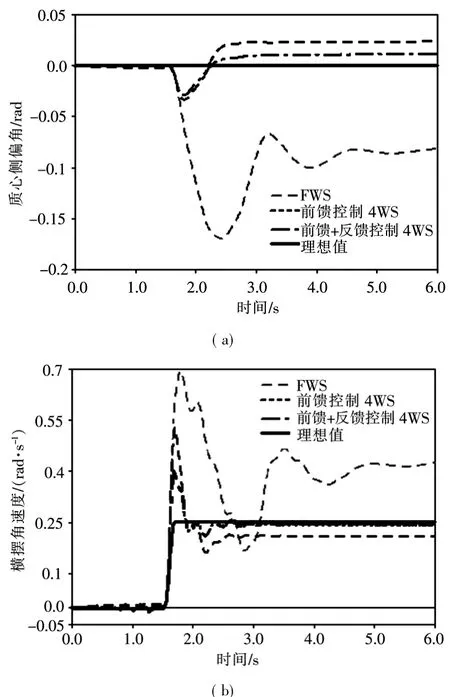
图6 角阶跃转向输入下的响应Fig.6 Responses under step steering input
以上仿真结果表明,所设计的综合控制器能很好地保持汽车在高速转向操纵下的稳定性,且系统响应迅速。
4 结论
通过在ADAMS中建立的四轮转向整车动力学模型,在Matlab/Simulink环境中建立四轮转向比例前馈加模糊反馈的综合控制系统模型,与ADAMS的整车多刚体模型实现了联合控制仿真。通过仿真研究可以看出,使用该控制策略时车辆横摆角速度可以有效跟踪理想模型保持在理想的水平。同时,侧偏角也能保持较为理想的动态和稳态特性,有效改善了车辆的操纵性能。
[1]屈求真,刘延柱,张建武.四轮转向汽车自适应模型跟踪控制研究[J].汽车工程,2002,22(2):73 -76.
[2]王洪礼,张锋,乔宇.汽车四轮转向系统的非线性控制[J].机械强度,2003,25(2):130 -133.
[3]陈军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008:55-95.
[4]冯樱,郭一鸣,郑冬黎,等.基于ADAMS的整车建模和操纵稳定性仿真评价[J].湖北汽车工业学院学报,2009,23(3):7-10.
[5]汪东明.基于DYC控制的4WS汽车操纵稳定[J].现代机械,2009(6):42-45.
[6]You S S,Chai Y H.Multi-objective control synthesis:an application to 4ws passenger vehicle[J].Mechatronics,1999(9):123-126.
[7]王洪礼,张锋,乔宇,等.汽车四轮转向系统的H2/H∞混合控制[J].汽车工程,2003,25(6):578 -580.
[8]张云清,马开献,田强,等.基于ADAMS和MATLAB协同仿真的转向模糊控制策略研究[J].计算机集成制造系统,2007,13(6):1235-1240.
[9]宋正华,陈南.4WS汽车虚拟模型的闭环控制动力学仿真[J].机械制造与自动化,2005,34(1):93 -96.
[10]Masato A,Yoshio K,Kazuasa S,et al.Side-slip control to stabilize vehicle lateral motion by direct yaw moment[J].JSAE Review,2001,22:413 -419.
[11][日]安部正人.汽车的运动和操纵[M].陈辛波,译.北京:机械工业出版社,1998:174-177.
[12]余志生.汽车理论[M].北京:机械工业出版社,2010:140-150.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06 03:36:14
装备制造技术(2021年4期)2021-08-05 07:39:40
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
物理教学探讨(2018年1期)2018-02-13 09:26:52
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
农机使用与维修(2014年11期)2014-11-18 01:32:07
中国自行车·骑行风尚(2014年4期)2014-10-10 05:00:14
小猕猴智力画刊(2013年6期)2013-04-29 00:44:03
