
小球运动平台控制系统的设计与实现
2010-11-07 08:41胡天链梁艳阳熊伟西南科技大学信息工程学院621010
中国科技信息 2010年16期
胡天链 梁艳阳 熊伟 西南科技大学信息工程学院 621010
小球运动平台控制系统的设计与实现
胡天链 梁艳阳 熊伟 西南科技大学信息工程学院 621010
1 引言
小球运动平台是一个多变量、非线性控制平台,是球杆系统的二维扩展。其控制对象是具有两个相互垂直的旋转轴的平面板,控制的目标是让一个自由滚动的小球能够平衡在板上特定的位置或者沿一定的轨迹运动。平面板绕两个转轴的旋转可分别由两个电机驱动,通过传感装置得到小球在平面板上的位置后反馈给控制系统,控制系统采用一定的控制策略控制平面板在两个转轴方向的转角,实现对小球在板上定点和轨迹运动的控制[1]。
小球运动平台于上世纪90年代中期首先在捷克大学的罗克维尔控制实验室搭建起来[2]。本世纪初,美国伦斯勒理工学院的学者通过设计新的驱动方式搭建了该系统并对动力学模型和控制方法进行了的探讨[3],其后,韩国和伊朗的研究人员也针对小球平面控制系统展开了研究[4-5]。2004年后,国内的清华大学和吉林大学先后分别在各自的实验室实现了小球平面系统的物理装置,初步研究了该系统动力学模型的特点并有针对性地进行控制算法的研究[1,6-7]。以上的设计机械结构都比较复杂,有必要在保持性能前提下对系统机械和信息反馈部件进行简化。因此,本文主要从更简洁有效的机械和电气系统设计的角度出发,讨论新型的小球运动平台控制系统的设计和实现问题。
2 小球运动平台控制系统的具体设计和实现
整个系统可分为六个模块:主控单元、机构本体运动单元、电机驱动模块、人机交互模块、小球位置感知单元、通信单元。
2.1 主控单元
本设计采用主从机的方式设计。其中,主机负责处理240*64液晶模块的菜单及图形化显示、PS/2键盘与鼠标的处理、触摸屏坐标获取以及数据的去噪处理,并将处理好的数据通过串行口(UART)发送给从机;从机则根据主机获取的小球位置坐标信号,经过PID运算后分别对X、Y轴的倾角进行调整。整个系统的原理框图如图1所示。根据该原理框图和系统总体设计思路,可以进一步设计系统的电路原理图,如图2所示。
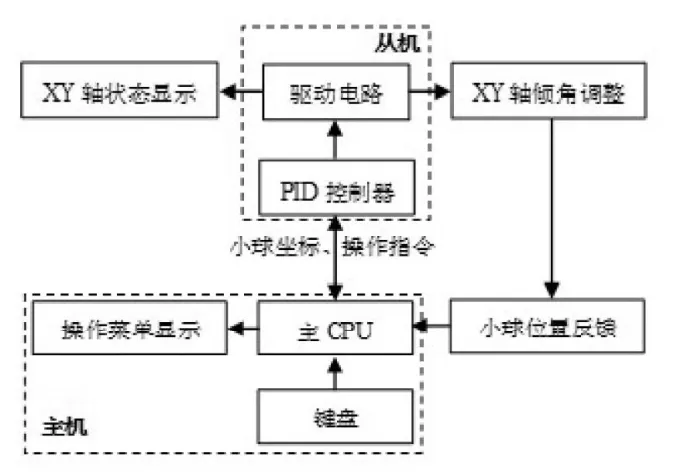
图1. 小球运动平台控制系统原理图

图2. 系统总体架构
2.2 机构本体运动单元
如图3所示为系统机械本体结构。注意到平板在X轴和Y轴两个方向上的转动分别由两个电机驱动。其中,X轴和Y轴都选择为2相、步进角为0.9/1.8deg的步进电机进行驱动。
根据电机转速n1=60r/min和从动轴转速n2=15r/min,可确定传动比为4:1。因此,可选择X和Y轴的传动带分别为HTD300-3M和HTD390-3M。
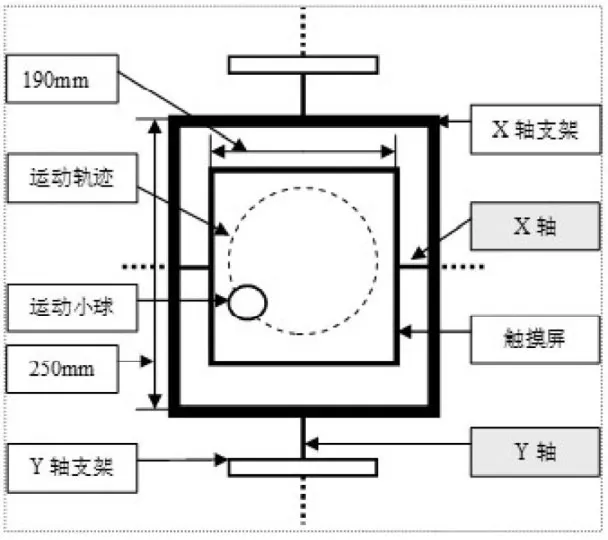
图3. 机械系统示意图
2.3 电机驱动单元
步进电机驱动原理如图4所示。为了防止驱动电路的脉冲反馈回控制电路导致单片机复位或死机,使用光耦将控制部分和驱动器部分进行电气隔离。通过改变比较匹配寄存器的值即可改变输出频率,从而实现可控频率。根据脉冲频率计算公式

其中,Fclk为系统时钟频率,N为定时器分频值,OCR1A为比较匹配值。选取1024分频,可求得产生频率的范围为
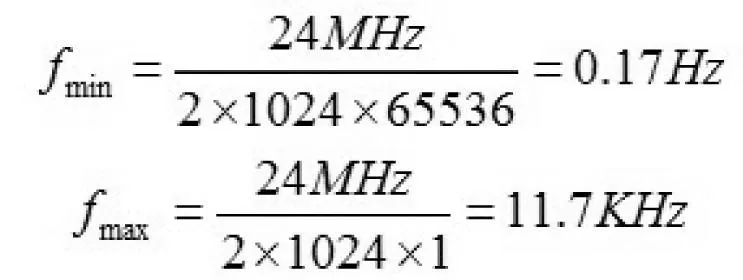
因此,步进电机的频率响应范围在0~2KHz,故可完全满足要求。此外,在发生匹配时,可选择触发中断。在中断服务程序里对脉冲计数,当达到设定值时,关闭定时器,停止产生脉冲。
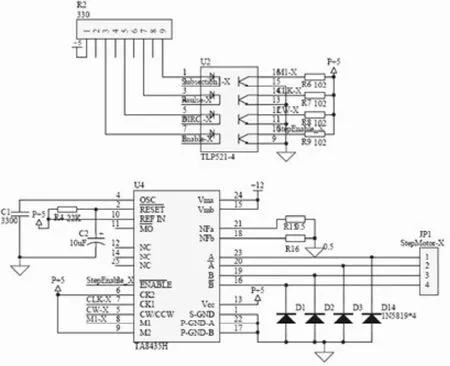
图4. 步进电机驱动电路图
2.4 人机交互单元
人机交互模块如图5所示。该模块主要由240*64分辨率的自带字库图形点阵液晶模块(LCM)和键盘组成。LCM与单片机通过8位并行接口通信,配合UP、DOWN、LEFT、RIGHT四个按键,可进行菜单中动态图形显示、参数修改、数据保存等多种操作,实现友好的人机界面。

图5. 人机交互接口模块原理图
2.5 小球位置感知单元
本设计仅利用AVR单片机内置的ADC(模数转换器)实现对触点实时位置的获取。
如图6所示,四线电阻触摸屏由两个透明的阻性层叠加而成,中间由很薄的透明绝缘支撑物隔开。每个阻性层都涂有均匀电阻质,在两端形成电极,由导线引出。屏的顶端在外力达到一定值时发生形边,与底层产生电气接触,此时可根据分压器原理计算短接位置,换算成实际的坐标。
获取触点位置关键在于采样数据的滤波处理。首先,在硬件设计层面上,通过在触摸屏根引脚上加上瓷片电容可有效减小噪声;在A/D采样电路的参考电源端采取串磁珠、并滤波电容可以减小测量误差。此外,在软件处理层面上,可采用队列平均滤波改进算法进行平滑处理。该种方法的优点在于:仅需要在初始化时填充队列,而实时采样中只需做两次加法和移位运算,处理速度大大提高,且滤波效果较好,基本没有大幅度的野点。
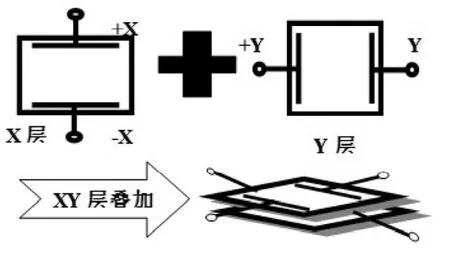
图6. 四线电阻触摸屏组成原理
2.6 通信模块
由于采用主从机模式分别处理数据,必须通过通信接口进行数据交换。传输本系统使用异步串行口数据及指令通信;双方均为TTL电平,且不需要远距离数据。为简洁起见,直接使用TTL电平的串行口传输,设置波特率为19200,每一帧由四位数据组成:帧头、数据X、数据Y、帧尾。
通讯方式为一发(主机)多收(从机),即主机发送小球的实时坐标及各种动作指令,2个从机分别检测帧头、帧尾,并从中提取出各自的信息。为了缩短数据帧长度,这里将动作指令与帧头帧尾字节复用。通信协议的命令字定义详见表1。
3 系统联调
以小球当前位置为原点,x和y的目标位置分别为10cm和20cm,可测试所设计的小球运动平台控制系统的阶跃响应性能。控制结果如图7~8所示。其中,图7表示小球在x方向和y方向的位置阶跃响应情况。从图中可见超调量约为10%,调节时间为0.7秒,上升时间约为0.2秒。图8表示小球在整个平板上的运动轨迹,横坐标为x方向位置,纵坐标为y方向位置。由于小球在x方向和y方向上都存在超调,所以小球的实际轨迹先经过图8中的点(0. 1, 0.2)处,然后到达图8中的右上顶点,最后稳定于点(0.1, 0.2)。
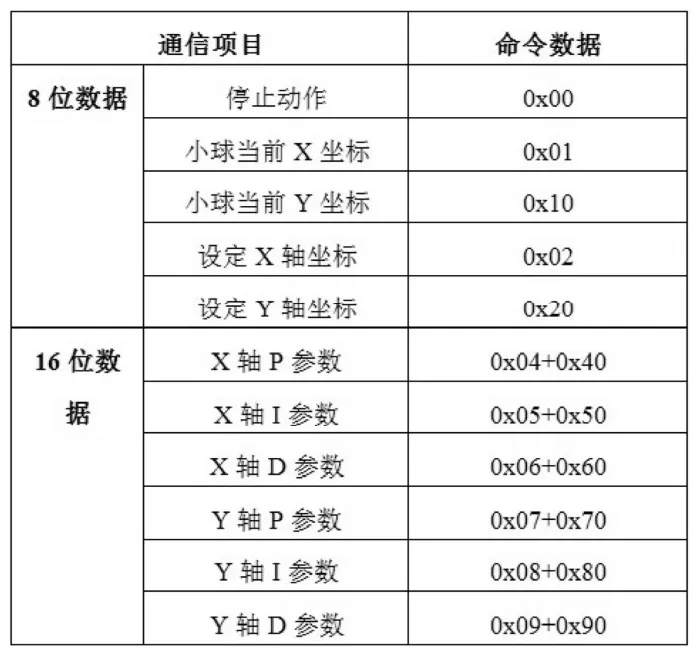
表1. 通信命令字

图7. x方向和y方向的阶跃响应
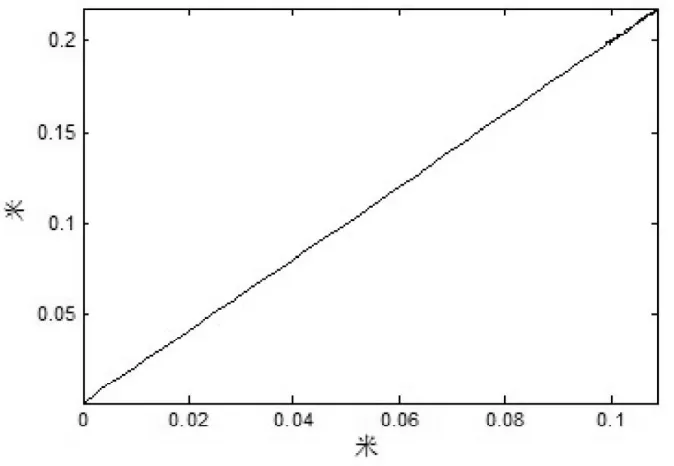
图8.小球在平板上的运动轨迹
4 结束语
本文基于机械、电子和控制技术设计并实现了新型的小球运动平台控制系统。该系统在PID控制下能实现小球沿平板上给定轨迹运动或定位于平板上任意给定位置。系统联调结果表明所构造的小球运动平台控制系统具有快速的响应和较高的位置控制精度,可以用于实验室的控制理论教学实验平台,根据需要可对PID算法进行拓展,或基于此平台研究其他更高性能的控制算法。
[1]王赓, 孙政顺. 板球控制系统的PD型模糊控制算法研究[J]. 电气传动, 2004, 4: 23-25.
[2]J. Fuka, Z. Hanzalek. Rockwell automation technology in intensive trainiing course[M]. Prague: Rockwell Automation, Allen Bradley, 1998, 1-15.
[3]S. Awtar, C. Bernard, N. Boklund, et al. Mechatronic design of a ball-on-plate balancing system [J]. Mechatronics, 2002, 12(2): 217-228.
[4]J. H. Park, Y Jong Lee. Robust visual servoing for motion control of the ball on a plate [J]. Mechatronics, 2003, 13(7): 723-738.
[5]M. Moarref, M. Saadat, et al. Mechatronic design and position control of a novel ball and plate system [C]. Control and Automation, 2008 16th Mediterranean Conference on, 1071-1076.
[6]李军, 孙政顺. 模糊控制在板球系统中的仿真研究[J]. 电机与控制学报. 2001, 5(4): 270-274.
[7]H. Wang, Y. Tian, et al. Nonlinear control for output regulation of ball and plate system [C]. Control Conference, 2008. CCC 2008. 27th Chinese, 382-387.
Design and Implementation of Ball on Plate Motion Control System
HU Tian-lian, LIANG Yan-yang, XIONG Wei
(Department of Information Engineering, Southwest University of Science and Technology,Mianyang 621000, China)
本文基于计算机控制技术、单片机技术、传感器技术以及机电一体化技术,通过对主控系统、位置信息感知系统、驱动单元等模块进行详细的理论论证、设计与调试,设计并实现了一个小球运动平台控制系统。该系统能自动获取小球的位置和速度信息,根据设计好的运动控制算法改变平面的X、Y轴倾角,保证小球稳定运动并停留于平面上的任意给定参考位置。
小球运动平台;运动控制;触摸屏
Based on the computer control technique, single chip processor technique, transducer technique and electromechanical integration technique, a ball on plate system is designed and implemented through detailed theoretical discussion, design and tuning for modules such as the main control unit system, position information acquisition system and driving unit, etc. The system can automatically obtains position and velocity information of the ball and guarantees the ball arriving to and staying at any given reference position in the plate, by changing the angles in X and Y direction according to motion control algorithm.
ball on plate system;motion contro;ltouch-screen
10.3969/j.issn.1001-8972.2010.16.076
西南科技大学博士研究基金(08zx0111)
胡天链(1981-),男,讲师,四川绵竹人,从事机电一体化技术研究;
梁艳阳(1980-),男,副教授(博士),广东阳江市人,从事非线性自适应控制;
熊伟(1984-),男,硕士研究生,河南信阳人,从事吊摆控制研究。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
铁道通信信号(2019年4期)2019-10-10
中学生数理化·高三版(2019年1期)2019-07-03
试题与研究·高考数学(2016年1期)2016-10-13
通信电源技术(2016年1期)2016-04-16
