
基于反推方法的滑模自适应励磁控制
2010-10-22 09:05:18鲁升敏
电网与清洁能源 2010年1期
鲁升敏
(陕西省地方电力(集团)有限公司,西安 710061)
0 引言
同步发电机励磁系统在电网中具有重要的作用,励磁系统的控制性能直接影响着电力系统的品质。传统的PID(比例-积分-微分控制)和PSS(电力系统镇定器)、LOEC(线性最优励磁控制)的设计是基于某一平衡状态下的线性化模型,因此仅对小干扰稳定问题有较好的效果,对于全局所设计的控制器也难以达到预期的性能指标。近年来,随着控制理论和技术的发展,非线性控制理论得到了很大的发展,主要有:直接反馈线性化、基于微分几何理论的精确线性化、非线性变结构控制、非线性自适应控制、非线性PID控制等。这些方法自20世纪80年代末、90年代初提出以来,在电力系统励磁控制中得到了广泛的关注,而且近十几年来在该领域进行了大量的理论研究和应用实践[1-6],取得了令人瞩目的成绩。但是这些方法需要系统精确的非线性模型,设计时需要比较高深的数学知识,设计过程相对比较复杂,对系统遭受未知干扰的控制效果不甚理想。常见的励磁控制往往将不易测量的状态变量作为实际的反馈变量,本文使用易于测量的状态变量作为控制用的状态量,因而更为实用。
反推方法的最终控制信号通过一系列 “虚拟”信号以递归的方式得到,虚拟信号事实上无需通过硬件,可直接经由计算得到,故可简化控制器的结构;递归的每一步只需要处理一个相对简单的误差系统,从而可较灵活地选择控制信号,有效改善过渡过程品质[7]。本文利用反推方法,对单机无穷大电力系统的鲁棒模型,采用反推逐步求解的方法,逐步构造出滑模超平面,通过逐步构造Lyapunov函数,设计了一种鲁棒励磁控制器。为了验证所提算法的效果,最后对设计的励磁控制器进行了仿真,结果表明在电力系统大、小扰动情况下,本文所提的非线性励磁控制器对改善稳定性有明显的作用。
1 励磁系统非线性模型
本文研究的电力系统为单机无穷大系统,由输电线路,变压器,发电机组成,其中同步发电机采用3阶模型。系统模型如图1所示。系统模型包括同步发电机的转子运动方程(1)、(2)和转子绕组电磁动态方程 (3)。

图1 单机-无穷大电力系统
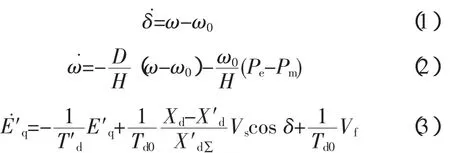
式中,δ为转子运行角;ω为转子角速度;D为阻尼系数;H为机械转动惯量;Pe为电机电功率;Pm为电机机械功率;E′q为发电机暂态电势;X′d为发电机暂态电抗;X′d∑=X′d+XT+XL,Td0为定子绕组开路时励磁绕组的时间常数;Vs为系统母线电压;Vf为励磁电压。其中

发电机的机端电压为

选择易于测量的发电机电功率代替不易测量的暂态电势E′q作为一个状态变量,对原系统进行如下变换:

则原系统方程变为:
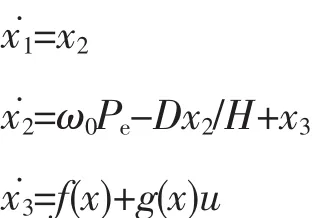
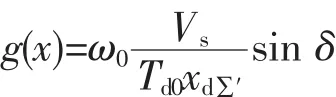
其中,

2 控制器设计
首先设计各个状态变量的跟踪误差

其中,x1d为转子运行角跟踪值;α1,α2为递推过程中的虚拟控制函数。
然后根据backstepping设计思路,逐步构造Lyapunov函数,分步逆推求解控制u。第1步:定义

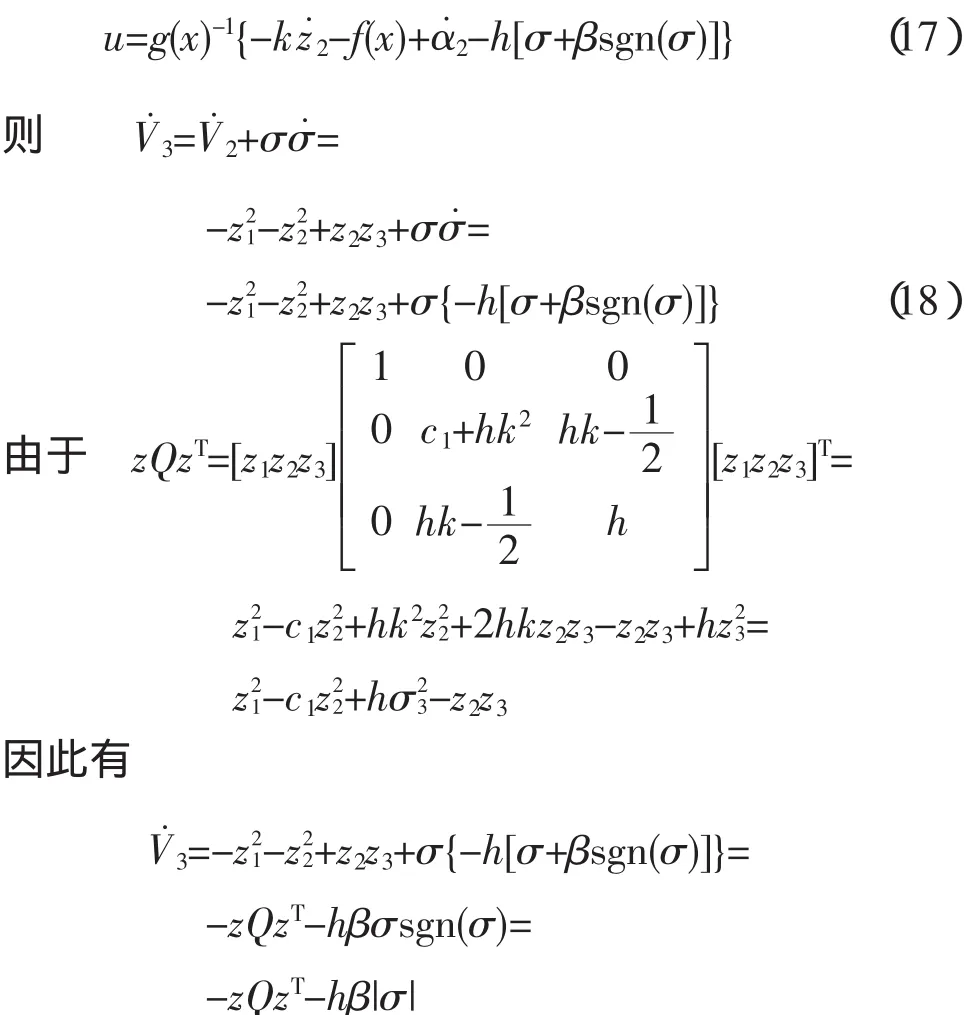
如果h,k,c1值选取得当,则可保证矩阵Q正定。
从上述设计分析过程中可以看出,本文提出的控制律能够稳定系统。
3 算例仿真
为了检验本文方法,在2种情况下对图1所示的单机—无穷大系统进行了仿真,并与常用的PID+PSS的控制进行了对比。系统中相关的参数为:H=6.2 s、D=0.075、Xd=2.8、X′d=0.38、Xp=2.3、Td0=4.5 s、XT=0.058、XL=0.053、Rf=0.31、Eq=1.32、Vs=1.0。
第一种情况,假设系统在稳定状态时突然遭受了有功功率冲击,即从100%降到70%时,图2表示机端电压和转子运行角的响应过程。
设在1 s系统发生了一回线路三相短路,1.2 s系统恢复正常。机组机端电压和转子运行角响应过程见图3。
4 结论
本文将反推设计的方法应用于发电机励磁控制设计。在对单机无穷大系统的模型进行了处理,建立了适合反推方法的下三角模型。并通过逐步反推建立了一系列Lyapunov函数,每一步在一定条件下确保了控制系统的稳定性,而且由于设计过程不需要经过任何线性化处理过程,因此对于复杂的非线性系统而言具有明显的优势。通过对单机无穷大系统设计的励磁控制仿真也证明了本文提出的控制律的有效性和正确性。
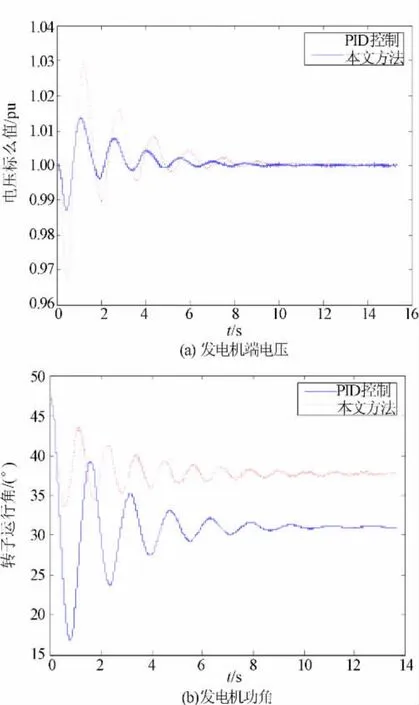
图2 系统负荷突变仿真响应曲线
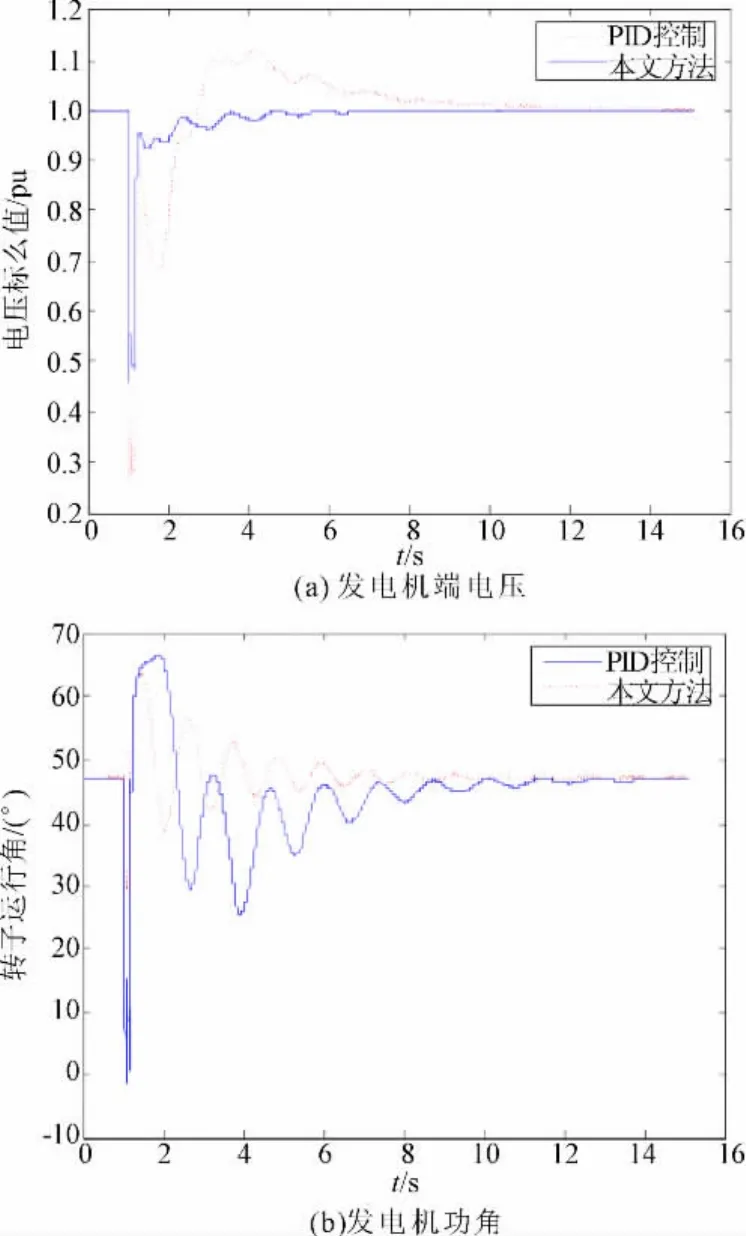
图3 系统发生三相短路响应曲线
[1] 马进,席在蓉,梅生伟,等.基于Hamilton能量理论的发电机汽门与励磁非线性稳定控制器的设计[J].中国电机工程学报,2002,22(5):88-93.
[2] Mark Gordon,David J,Hill.Flexible Nonlinear Voltage Control Design for Power Systems [C]//16th IEEE International Conference on Control Applications Part of IEEE Multi-conference on Systems and Control.Singapore,1-3 October 2007:1097-1102.
[3] 李啸骢.U型非线性抗扰励磁控制规律设计[J].中国电机工程学报,1999,19(9):72-75.
[4] 王冰,季海波,陈欢,等.汽轮发电机励磁与汽门协调无源性控制[J].中国电机工程学报,2004,24(5):104-109.
[5] 兰洲,甘德强,倪以信,等.电力系统非线性鲁棒自适应分散励磁控制设计[J].中国电机工程学报,2006,26(17):1-5.
[6] Tielong Shen,Shengwei Mei,Qiang Lu,et al.Katsutoshi Tamura A Daptive Nonlinear Excitation Control With L2 Disturbance Attenuation for Power Systems[J].Automatica,2003,39:81-89.
[7] 董文瀚,孙秀霞,林岩.反推自适应控制的发展及应用[J].控制与决策,2006,21(10):1081-1086.
猜你喜欢
电气电子教学学报(2023年5期)2023-11-13 08:43:16
电子产品世界(2023年12期)2023-03-20 10:16:37
科技信息·学术版(2021年31期)2021-12-03 05:09:36
湖南大学学报·自然科学版(2021年1期)2021-02-21 08:39:40
中等数学(2020年2期)2020-08-24 07:58:46
科学与财富(2020年3期)2020-04-02 07:09:52
测控技术(2018年9期)2018-11-25 07:44:24
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
北京航空航天大学学报(2016年6期)2016-11-16 01:50:50
光学精密工程(2016年3期)2016-11-07 09:03:32
