
基于HGK-1型过程控制系统的实验研究
2010-09-27 02:36袁杨赵莉
中国现代教育装备 2010年15期
袁 杨 赵 莉
连云港市职教中心 江苏连云港 222000
基于HGK-1型过程控制系统的实验研究
袁 杨 赵 莉
连云港市职教中心 江苏连云港 222000
介绍了HGK-1型过程控制实验平台,采用试验建模方法建立了被控对象的数学模型,在此基础上进行实验研究,证明了在大时延系统的控制上,串级系统控制优越性较强。
过程控制;PLC
一、实验系统介绍
HGK-1型过程控制系统是由东南大学自动化学院Rockwell实验室自行开发,基于工业过程模拟对象的多功能实验装置,实验装置的总体结构包括多功能实验台和控制面板两个部分(如图1所示)。
图1 实验设备图
多功能实验台构成有:水箱、储水槽、SCR电加热器,温度传感器、大时滞盘管、压力传感器、液位传感器、流量传感器、变送器、电动调节阀、电磁阀、变频器、水泵、循环水泵、接线端子排等。控制面板上有开关,指示灯,智能控制仪表,实现一些控制和监视的功能。图2为实验系统结构示意图。
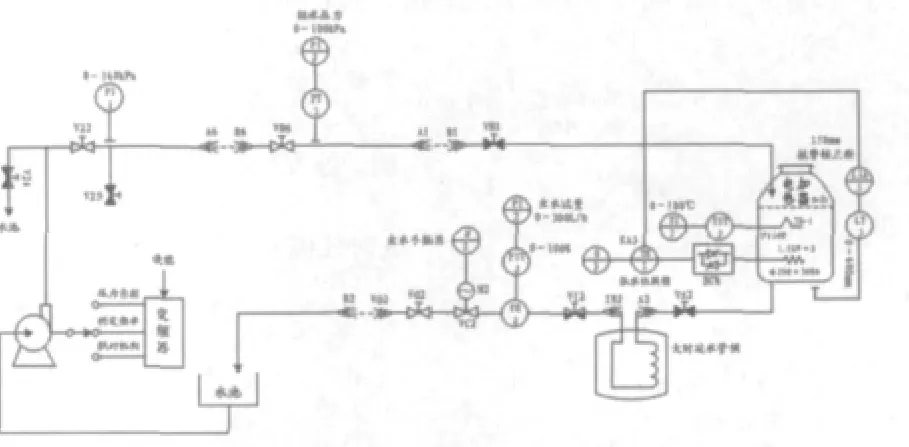
图2 实验系统结构示意图
笔者以上述系统为对象,采用Rockwell自动化公司的MicroLogix1500 PLC对对象中的大时延系统进行了实验研究。
二、系统的建模与仿真
我们将实验平台中的大时延系统(即锅炉加水管延时)近似为一个一阶惯性加时延系统,我们通过飞升曲线法求得系统的K、T、τ,即可近似认为确定了大时延系统的传递函数。具体操作方法为:首先使输入保持不变,等到系统稳定后,加入一个扰动,记录下锅炉大时延管道出口处的温度曲线,可见该曲线的形状为S形,可用切线法或计算法来求取各项参数,得出大时延系统的数学模型。实验曲线如图3所示。
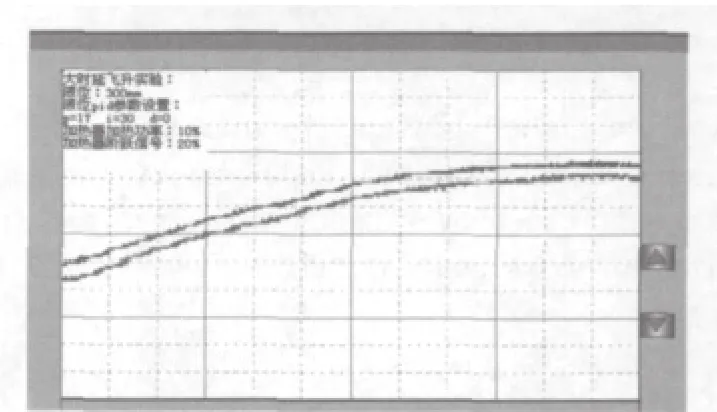
图3 实验曲线
三、控制方案介绍
笔者采用串级和Smith预估补偿相结合的控制方案。在主回路中采用Smith预估补偿,副回路选择锅炉的出水口温度为控制输出量,在锅炉下部装有Pt-100热电偶,可以测量锅炉出水口的温度,通过变送器转换成1-5V的信号,经过信号线传输到PLC。
四、实验结果
笔者通过实验法建立了系统的数学模型为:基于上述Smith预估控制的原理,在实验中用PLC进行控制。PLC的连接示意图如图4所示。从控制曲线(如图5)上可以看出,采用Smith预估控制方案后,系统的调节时间明显减小,稳定性得到提高。
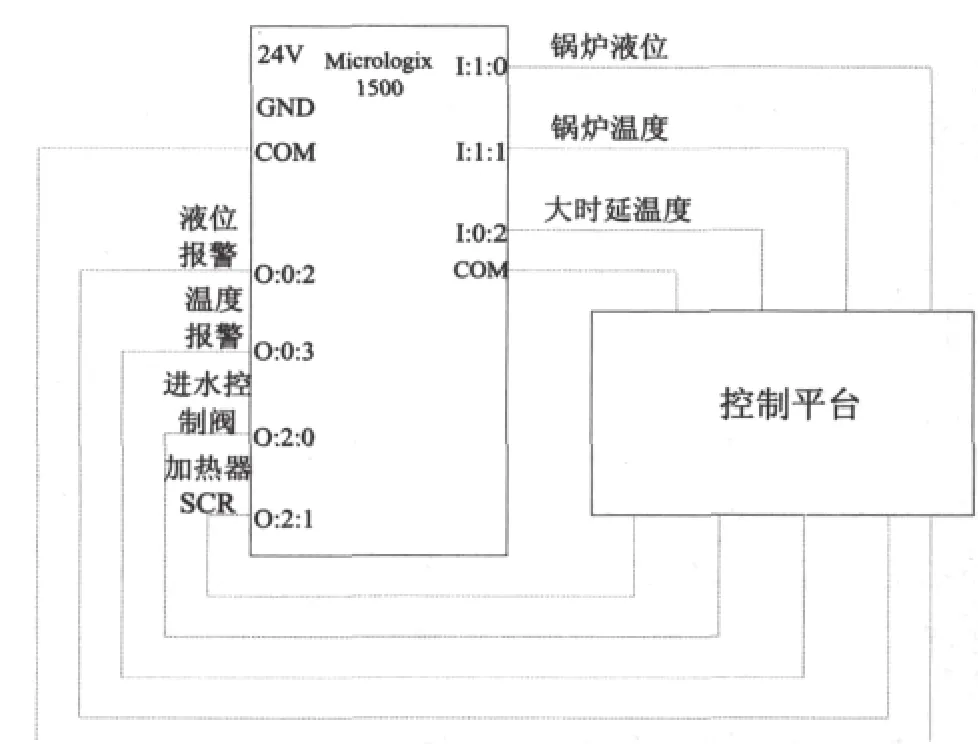
图4 PLC的连接示意图
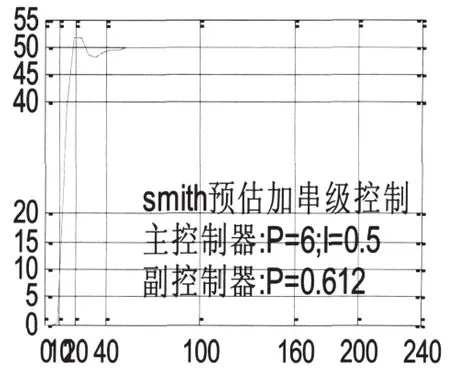
图5 控制曲线
[1]邵裕森,戴先中.过程控制工程(第2版)[M].北京:机械工业出版社,2000
[2]Rockwell公司.Micro1500 user’s guide[M].Rockwell automation publication.2000
[3]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002
Basing on HGK-1, the experiment research about process control system
Yuan Yang, Zhao Li
Lianyungang vocational education center, Lianyungang, 222000, China
At first, the author introduces HGK-1 process control system experiment plat, and then the author establishes a mathematical model about the object controlled, using the method of experiment modeling; at last, the article proves under delay system, the cascade system control priority shows more obvious.
process control; PLC
2010-03-12
袁杨,本科,中教二级。赵莉,本科,中教一级。
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
科技创新导报(2021年34期)2021-04-13
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
电子制作(2019年23期)2019-02-23
电子制作(2017年9期)2017-04-17
电子制作(2017年24期)2017-02-02
制冷技术(2016年3期)2016-12-01
中学数学杂志(初中版)(2016年5期)2016-11-01
