
机载AIS接收机冲突概率分析
2010-09-26 00:43
电讯技术 2010年10期
(中国西南电子技术研究所,成都 610036)
1 引 言
船舶自动识别系统(Automatic Identification System,AIS)主要用于对海上航行的船舶进行动态跟踪,实现船舶标识、位置、航向、航速等航行信息的自动交换[1]。AIS采用自组织时分多址(Self-organizing Time Division Multiple Access,SOTDMA)通信协议[2-3],自动地播发出本船的静态、动态和航次信息,达到规避船舶碰撞、领航调度和航运管理等航行决策的目的。
在和平时期,岸基VTS(船舶交通管理系统)担负了打击国际恐怖袭击、走私贩毒、搜索救援等任务。VTS利用AIS设备可以实现对海面船舶的识别,同时将AIS信息与雷达目标进行融合,但岸基AIS设备的作用范围仅能达到40~60 nmile,覆盖范围有限。为实现宽海域的AIS监视,并实现对特定船只的连续跟踪,可以在机载平台(巡逻机、搜救直升机等)上加装AIS接收机,从高空对大范围的海域进行AIS信号监视,从而极大地扩充岸基站的监测范围;同时,由于机载平台的灵活性,也可以实现对特定船只、区域的连续跟踪,从整体上提高了对海态势监测的完整性和连续性。
在飞机上加装AIS设备,需要解决的一个主要问题就是接收AIS信号的冲突问题。虽然海面船舶之间通过SOTDMA协议实现了时域上的协同,但也仅限于局部的海域范围,当间隔足够远时,存在若干艘船在同一时隙同时发送AIS信号的情况,虽然不影响船舶间的协同工作(类似于移动蜂窝通信网原理),但可能对机载AIS接收机造成一定的影响,若这些同时发送的AIS信号到达飞机时信号强度差异不大,则机载AIS接收机就无法正确接收和解析AIS信号,造成了冲突,并降低了机载AIS接收机的接收效能。
本文首先介绍了机载AIS冲突问题在国内外的研究现状,然后对冲突概率进行了理论分析,导出了观测时间与发现概率的关系,最后通过模拟仿真,对结论进行了验证和总结。
2 国内外研究现状
AIS设备是民用船舶的基本配置,国际海事组织明确规定,从事国际航行的300 t及以上船舶、从事非国际航行的500 t及以上新建船舶必须强行安装AIS设备。除了在船舶上的应用,AIS技术已经逐渐进入了航空航天领域。2003年初,美军在E-2C预警机上加装了AIS设备进行了试验;2004年至2005年,挪威先后发射了NCube-1和NCube-2两颗载有AIS基站的通信卫星;2007年,美国TacSat-2号卫星上的AIS接收机在运行轨道上成功检测到了数千公里范围内的AIS信号;2009年4月,欧洲空间理事会(ESA)连同欧洲工业部门,研发了空基AIS监测系统,通过卫星进行AIS信号监视;虽然国内的船舶和岸基AIS系统建设已经逐渐趋于完善,但空基、天基AIS技术的研究还比较落后,国内相关研究院所将在“十二五”期间开展该课题的论证研究工作。
AIS接收机的冲突问题引起了国内外研究者的高度重视,文献[3]对SOTDMA的自组织特性进行了分析,对不同负载下的链路吞吐率进行了仿真,文献[4]对AIS网络链路的容量和拥塞问题进行了分析;文献[5]介绍了基于小型卫星的AIS接收机的相关关键技术,对通信链路、星上天线设计问题进行了讨论;文献[6]介绍了利用卫星进行AIS信号接收的研究现状,并对冲突概率进行了分析;还有文献给出了空基AIS接收机冲突概率的公式定义。通过对国内外相关文献的研究发现,目前的AIS冲突问题研究基本都是基于海面船舶或卫星展开的,在机载AIS方面的研究还属空白。本文以高空巡逻机为例,对空基AIS信号接收的冲突概率进行了理论分析和深入研究。
3 冲突概率分析
3.1 定义
由于机载AIS接收机可以覆盖较大的海面区域,因此在一个时隙内若同时收到来自海面多个船只的AIS信号时,就可能导致无法正确接收信号。以一艘特定的船只为例,研究它在某一特定时隙发出AIS信号而被其它船只所干扰的问题,因此本文将“冲突”定义为:一艘特定船只在一个特定的时隙内发出AIS信号,若该时隙内有其它船只也在发送AIS信号,且这些信号到达飞机时的信号强度相差不大时,则判定为冲突。冲突概率定义为:这个特定船只在一个时隙内发送一次AIS消息,与其它船只发生冲突的概率。
3.2 海面场景定义
海面船舶间通过SOTDMA协议进行AIS网络自组织运行,船与船之间的通信距离通常为20 nmile(以舰船天线高度10 m估算),通过链路预算分析,得到机载AIS接收机的信号覆盖半径约为300 km(以8 km的飞行高度估算),为了便于后面的分析,将海面划分为若干个边长为40 nmile的正方形区域(简称为AIS小区)。各个AIS小区中分布的船只数量、平均航速均不相同(对应的AIS发送周期也不相同)。通常,越靠近港口中心的小区,其船只数量越多,但平均航速越低,AIS播报周期越长;越远离港口的小区,船只数量越少,但平均航速越高,AIS播报周期越短。
3.3 冲突概率
根据上一节定义的海面场景,本节对冲突概率进行了理论推导。为简化分析,这里进行了如下的假设:
(1)单个AIS小区内所有船只之间不存在冲突,冲突仅发生在跨小区的船只之间;
(2)单个AIS小区内所有船只的AIS发送周期即报告率(RR)和标称增量(NI)[2]均相同,在时间轴上任意NI个连续的时隙间隔中,小区内所有船只的发送时隙呈均匀分布,且每只船仅发送一次AIS消息;
(3)各个AIS小区之间的发送时隙分配相互独立;
(4)忽略AIS发送接收信道的差异,并假设所有船舶AIS发射机的发射功率和天线增益均相同。
在上述假设成立的前提下,研究一艘特定船只发送一次AIS消息而与其它小区船只发生冲突的概率,首先分析一个小区对该特定船只产生的冲突概率,再推广到多个小区产生的总冲突概率。
3.3.1单小区的冲突概率
假设被研究的特定船只(简称为Object)属于AIS小区Zone-A,在一个特定的时隙k(1≤k≤2 250)发出AIS信号;AIS小区Zone-B中存在Nb艘船,每艘船的AIS发送间隔均为NIb个时隙。下面分两种情况对冲突概率进行考虑。
(1)当20lg(DA/DB)≥8 dB时
DA和DB分别表示小区Zone-A和小区Zone-B的中心至飞机的距离,这里将距离比等效为信号到达飞机时的强度比。当Zone-B至飞机的距离远远大于Zone-A至飞机的距离时,即使机载AIS接收机同时收到来自两个小区的AIS信号,但由于来自Zone-B的信号强度低于来自Zone-A的信号强度8 dB(8 dB为工程经验值)以上,则机载AIS接收机仍能正确接收来自Zone-A中Object的AIS信号,此时冲突概率为0。
(2)当20lg(DA/DB)<8 dB时
由于两个小区至飞机的距离之差不够大,导致来自两个小区的信号强度差别不大,此时可能存在冲突。要使Zone-B中的所有船只对Object的这次AIS发送不产生冲突,则意味着Zone-B中所有船只在时隙k对应的NIb间隔中,占用的发送时隙集合(一共占用了Nb个发射时隙)与Object使用的时隙k不重叠,如图1所示。
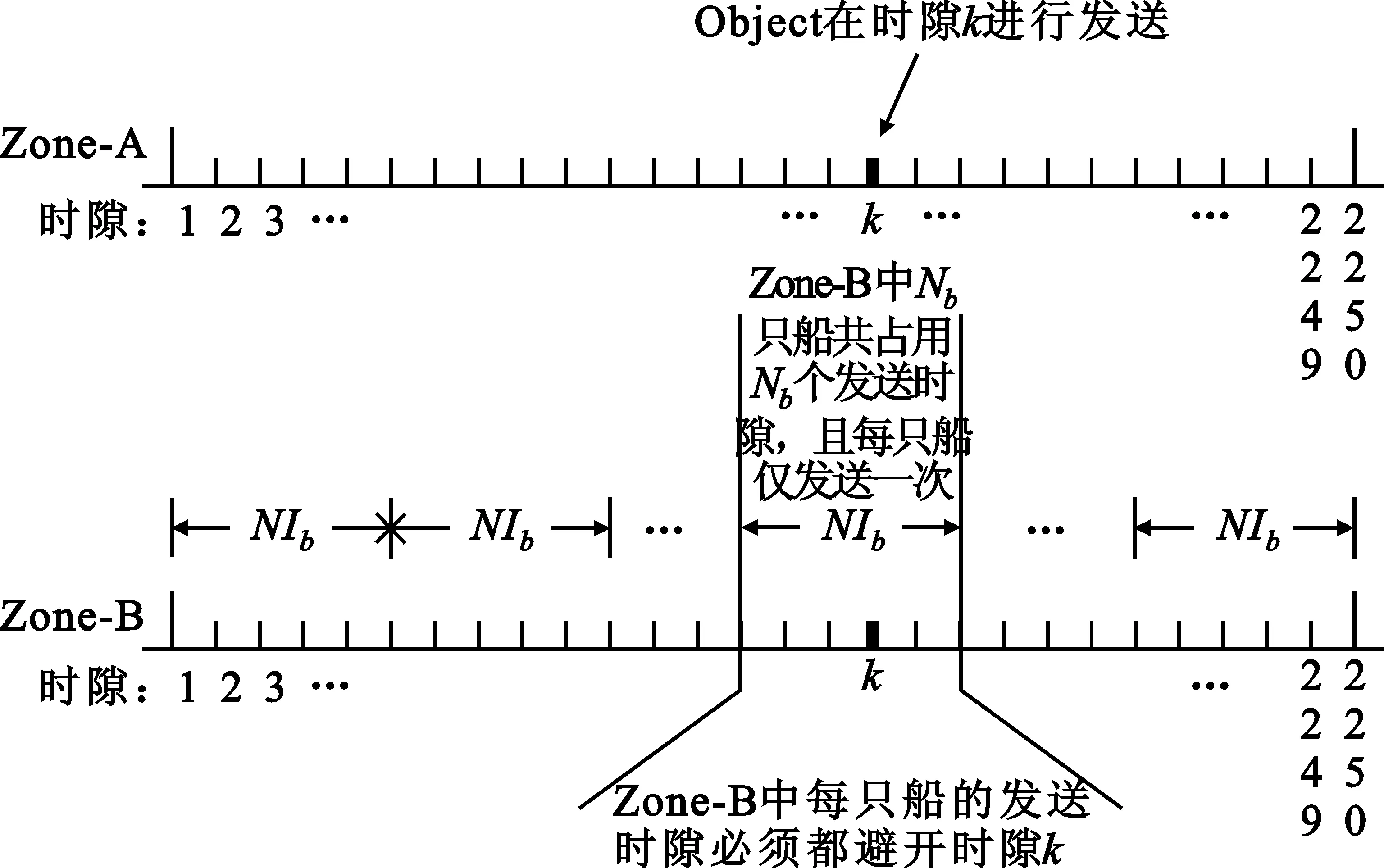
图1 时隙分配示意图Fig.1 An example of time-slot allocation
由于在时隙k对应的NIb个连续时隙间隔中,Zone-B中Nb只船占用的Nb个发送时隙在NIb个时隙中呈均匀分布,因此Zone-B中所有船只不对Object的这次发射造成冲突的概率,即不冲突概率P1为
(1)
相应地,小区B对Object的冲突概率Q1为
(2)
3.3.2多小区的冲突概率
同理,对于其它多个小区对Object的这次发射产生冲突的分析与单个小区的分析一致,由于直接计算总冲突概率比较复杂,因此从计算总不冲突概率来进行反推。由于各个小区间的时隙分配相互独立,因此所有小区对Object不造成冲突的概率P为
(3)
式中,k为第k个小区;M为小区集合,除开Object所在小区,且同时满足20lg(DOBJ/Dr)<8 dB的所有小区r集合,其中DOBJ/Dr为Object所在小区中心与小区r中心至飞机的距离比;Nk为小区k中的船只总数;NIk为小区k中每只船的标称增量。因此,所有小区对OBJ造成的总冲突概率Q为
(4)
4 接收效能分析
机载AIS接收机的接收效能可以理解为以多快的速度能够发现海面多少只船的能力。基于对单个特定船只发送一次AIS消息被冲突的概率分析结果,可以推导出观测时间与发现该船只的概率关系,进而推导出观测时间与发现整个海域船只的概率关系。
以一个特定的小区为例,假设小区中船只总数为N,每只船的AIS发送周期为Δt,飞机对该小区观测的时间为T,单个船只发送一次AIS消息被飞机正确接收的概率为P(参见公式(3)),相应地不能被飞机接收(冲突)的概率为Q(参见公式(4))。因此,对于该小区中的某个船只,在观测时间T内,飞机能够发现它的概率a为
(5)
小区中每只船在观测时间T内被飞机发现的概率均相同(等于a),且每只船相互独立,因此对于小区中第i(1≤i≤N)只船,在观测时间T中,定义事件xi:
(6)
在观测时间T内,假设在该小区中一共发现了M(M≤N)只船,利用独立的二项分布事件的求和理论,得到相应的概率P′(M)为

(7)
同理,若在该小区内至少发现了M只船,则相应的发现概率P(M)为
(8)
将公式(5)中的参数a代入上式,可以得到:

(9)
式(7)和式(9)描述了观测时间T与发现船只数M的概率关系,该值同时与小区中的船只总数、AIS发送间隔、冲突概率均有关系。
5 仿真分析
根据国外某AIS网站在2010年的研究结果,中国天津港在半径210 km的海域范围内分布了约有470艘装有AIS设备的船只,如图2所示。
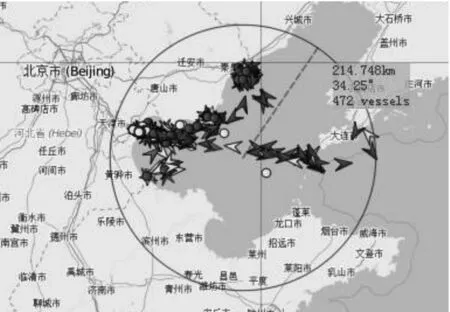
图2 中国天津港AIS船舶分布Fig.2 AIS distribution in Tianjin(China) port
考虑到机载AIS设备的信号覆盖半径约为300 km,同时兼顾未来将有越来越多的船只安装AIS设备,本文构建了一个以港口为中心、半径300 km、共800艘船的模拟场景。同时,将整个场景划分为45个AIS小区,各个小区的船只分布如图3所示,并利用Matlab仿真工具对该场景下的冲突概率和接收效能进行了仿真分析。

图3 仿真模拟场景Fig.3 Simulation scene
5.1 冲突概率仿真
从公式(3)中集合M的选取范围来看,冲突概率的计算与飞机所在的位置有关,这里以几个典型的小区为例,分析当飞机处于不同位置时,不同小区中船只的冲突概率分布,仿真结果如图4所示。
图4 飞机在不同位置时的冲突概率Fig.4 Collision probability under different airplane position
根据图4的结果可以发现,对一个特定小区中的船只,当飞机越靠近时,其冲突概率越低,其主要原因就是考虑了8 dB的距离间隔因素。飞机越靠近被观测的船只,就越容易接收到该船的AIS消息。针对每个小区,对飞机分别在45个小区上空的情况进行了仿真,并取平均值,得到各个小区船只的平均冲突概率分布,如图5所示。
根据仿真结果可以发现,越靠近港口中心的小区,其冲突概率越高,主要原因是由于港口附近的小区船舶数较多,单位时间内占用的发送时隙也较多,因此发生冲突的可能性越大。远离港口中心的小区,单位时间内的发送时隙数明显减少,同时港口中心小区对其造成的冲突也因为8 dB的距离限制而逐渐弱化,因此冲突概率相对较低。
5.2 接收效能仿真
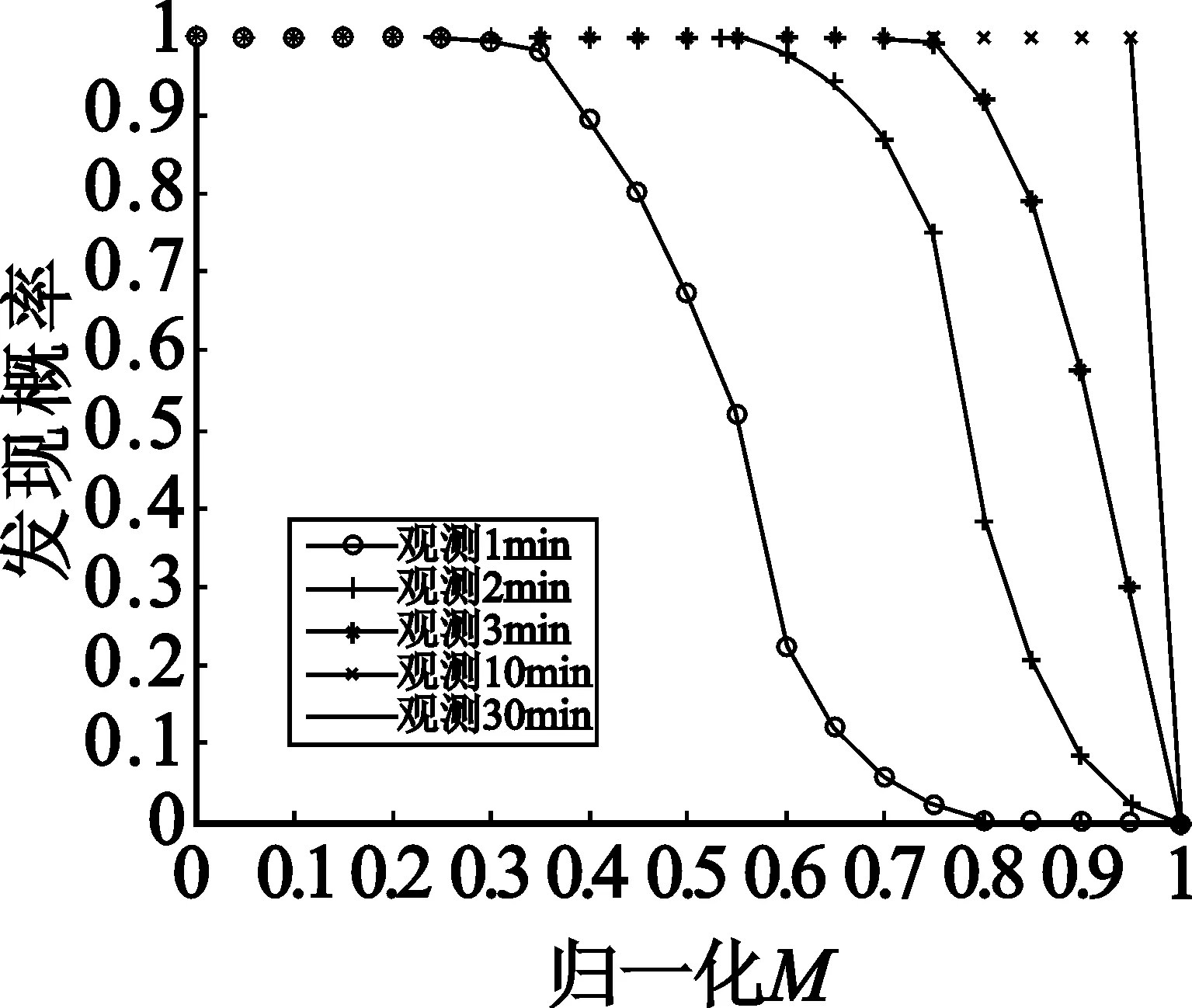
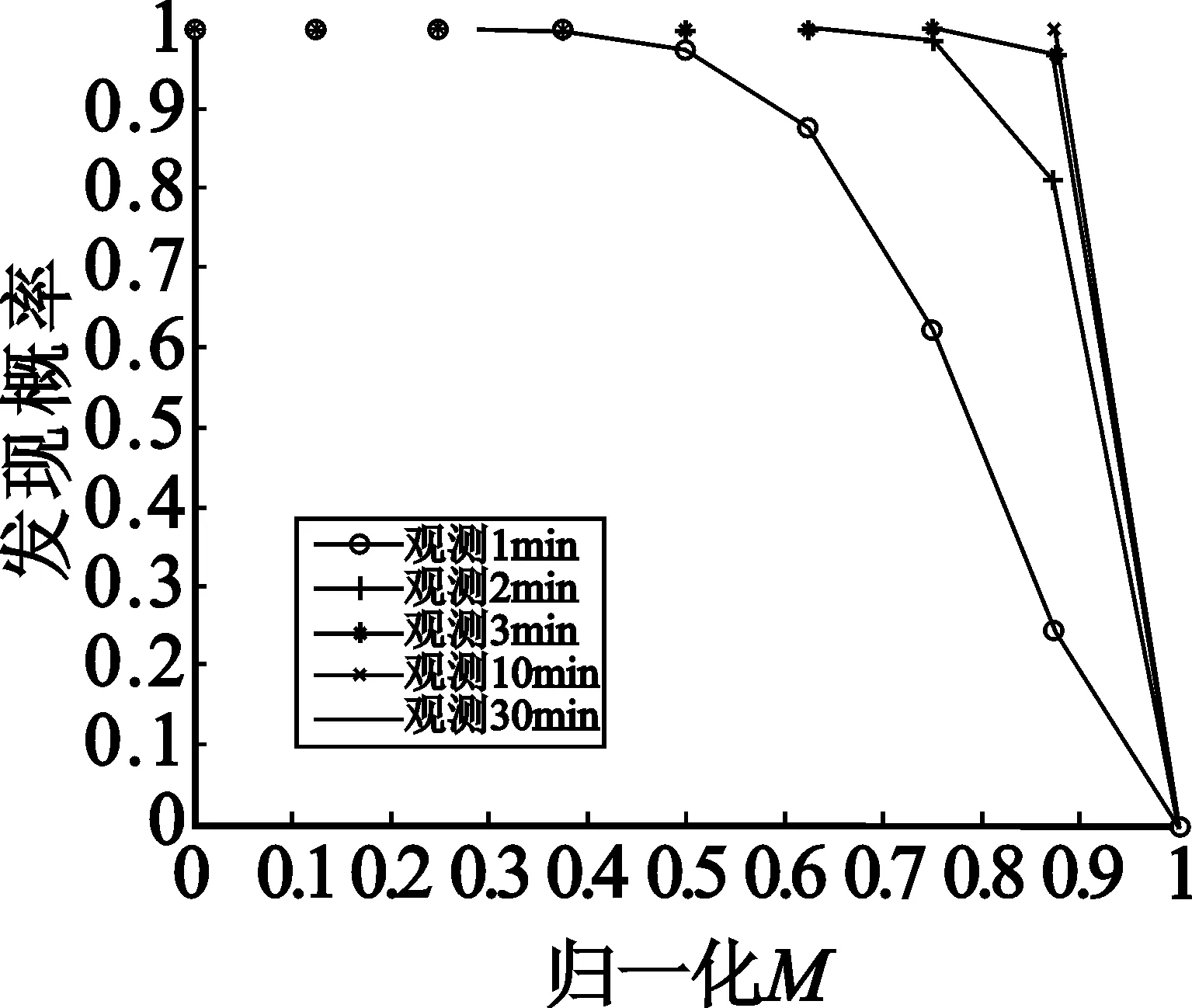
针对5个典型的区域(5,14,23,32,41),对机载AIS接收机的接收效能进行了仿真。这里选择不同的观测时间T和发现的船只数M,并对发现的船舶数M进行归一化(M占本小区船舶总数的比值),得到的发现概率P(M)曲线如图6所示。
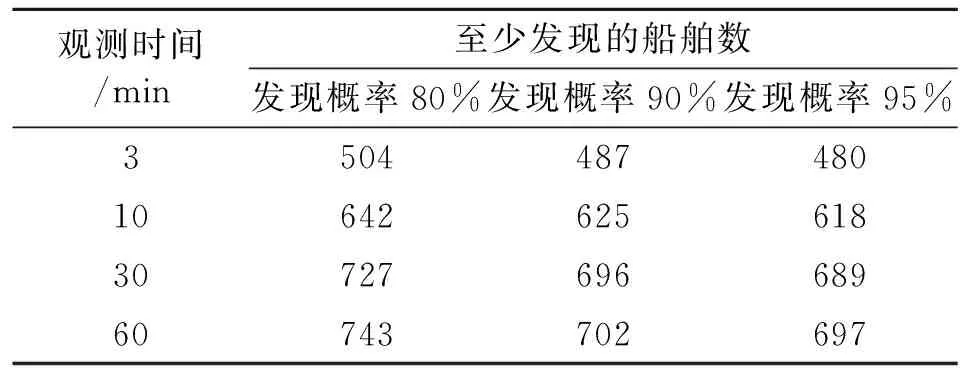
通过仿真分析发现,在一个小区中,观测时间越长,发现同等数量船舶的概率越高;另外,在一定的观测时间内,发现的船舶越多,则概率越低。为了描述载机AIS接收对整个海面所有船只的接收能力,这里对45个小区共800艘船的数据进行了汇总,得到在不同观测时间、不同发现概率下,至少发现的船舶数量,如表1所示。
(a)小区5
(b)小区14
(c)小区23
(d)小区32
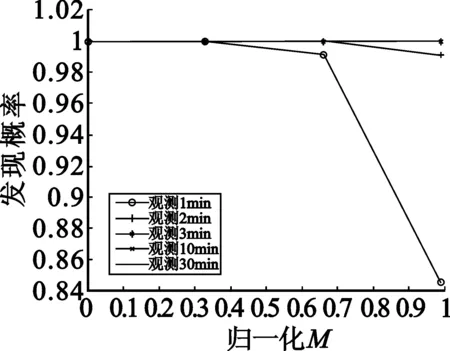
(e)小区41图6 不同小区在不同观测时间下的发现概率Fig.6 Discovering rate under different zones and observation time
观测时间/min至少发现的船舶数发现概率80%发现概率90%发现概率95%3504487480106426256183072769668960743702697
表1中的船舶数量含义为,在一定的观测时间内,至少有多少只船舶被发现的概率。例如,观测10 min,对于海面的800艘船,有80%的可能性发现其中至少642艘,有90%的可能性发现至少625艘,而有95%的可能性发现至少618艘。
6 结束语
本文对飞机加装AIS接收机的课题进行了探讨,首次对机载AIS接收机的冲突概率问题进行了理论分析,并对接收效能进行了推导,通过建立模拟仿真环境,对理论分析的结果进行了验证。下阶段将开展的研究工作是进一步探讨减小机载AIS冲突概率的有效方法。
参考文献:
[1] 王飞舟,范成.自动识别系统(AIS)性能综合评价[J].中国航海,2001(1):14-17.
WANG Fei-zhou,FAN Cheng-liang.Comprehensive Assessment of AIS Performance[J].Navigation of China,2001(1):14-17.(in Chinese)
[2] 李大军,姚罡,常青,等.SOTDMA技术应用及其性能分析[J].电子技术应用,2006,32(2):126-128.
LI Da-jun,YAO Gang,CHANG Qing,et al. SOTDMA Technology and its Performance Analysis[J]. Application of Electronic Technique,2006,32(2):126-128. (in Chinese)
[3] 刘鹏, 谢永锋. AIS系统中SOTDMA协议仿真与分析[J]. 电讯技术, 2010,50(3): 37-40.
LIU Peng,XIE Yong-feng.Simulation and Analysis of SOTDMA Protocol for Automatic Identification System(AIS) [J].Telecommunication Engineering, 2010,50(3): 37-40. (in Chinese)
[4] 胡越黎,孙斌.AIS网络数据链路容量分析及拥塞解决方法[J].计算机测量与控制,2007,15(11):1631-1634.
HU Yue-li,SUN Bin.Data link Capacitance and Congestion Resolution for AIS[J].Computer Measurement & Control,2007,15(11):1631-1634. (in Chinese)
[5] 郝盛,陈涤非.星载AIS收发机的关键技术初探[J].航空电子技术,2007,38(4):7-11.
HAO Sheng,CHEN Di-fei.Primary Research on the Key Technologies of Satellite Based AIS Transceiver[J].Avionics Technology,2007,38(4):7-11. (in Chinese)
[6] Eriksen T, Gudrun Hye, Bjrn Narheim,et al. Maritime Traffic Monitoring Using a Space-Based AIS Receiver[J]. Acta Astronautica,2006,58(10):537-549.
猜你喜欢
舰船电子对抗(2020年2期)2020-06-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
铁道通信信号(2018年9期)2018-11-10
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
舰船科学技术(2015年8期)2015-02-27
环球时报(2012-03-13)2012-03-13
