
星载AIS接收冲突分析及仿真
2010-09-26 00:43
电讯技术 2010年10期
(中国西南电子技术研究所,成都 610036)
1 引 言
随着世界经济一体化进程的快速发展,国际间对全球海域各类船舶运输情况的监视需求急剧增长,需要新的有效手段来监视和处理有害货物的运输、打击走私的猖獗和遏制全球恐怖主义的泛滥,星载AIS接收设备的出现[1-3],迎合与满足了这类海域目标的探测、识别和跟踪需求。
通常情况下,在AIS子网络的通信范围内,相关AIS设备通过TDMA协议有组织协同工作,避免发射和接收时隙冲突的发生。而另一方面,从图1所示的卫星在太空运行的角度看,星载AIS将作用更多独立的AIS子网络,从而产生接收时隙冲突的可能性。因此,从卫星上接收AIS信息将面临覆盖范围广、接收AIS信息的时隙冲突增大等问题,相关文献对此类问题进行了有益的研究、评估和仿真[4]。
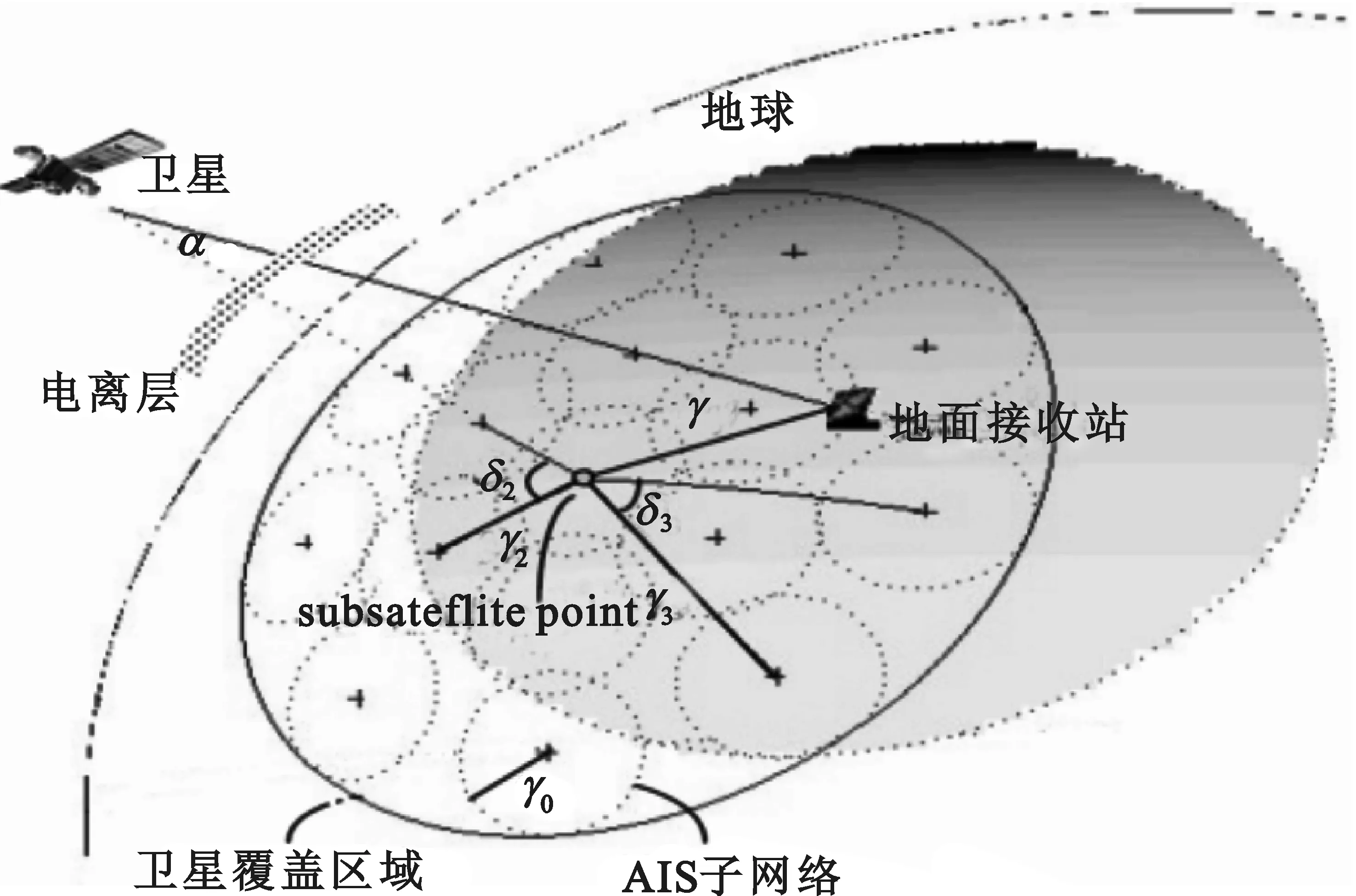
图1 卫星AIS接收示意图Fig.1 Space-based concept for AIS reception
本文是在以前论证工作的基础上[5],对星载AIS接收设备所涉及到的接收时隙冲突问题及接收概率进行了分析和论证。在建立基于星载AIS系统的观察、分析模型基础上,理论分析了星载AIS接收时隙冲突概率并给出了接收时隙冲突概率公式,并对相关理论结果进行了Matlab仿真;同时,根据仿真结果给出了星载AIS接收设备的优化建议。
2 理论分析
AIS系统是基于SOTDMA链路接入协议和时隙划分而有效工作的。SOTDM 信道接入协议的目的是在无基站控制的情况下通过一定的信道接入算法解决彼此的发射时隙冲突。
2.1 SOTDMA接入方式
利用图2的时隙选择图来完成SOTDMA信道接入算法,并保障时隙的同步、确定初始时隙以及分配(预约)工作时隙。为了简化讨论,我们假设AIS船载设备只在一个信道间隔发射。有关AIS系统详细的描述参见文献[6-7]。
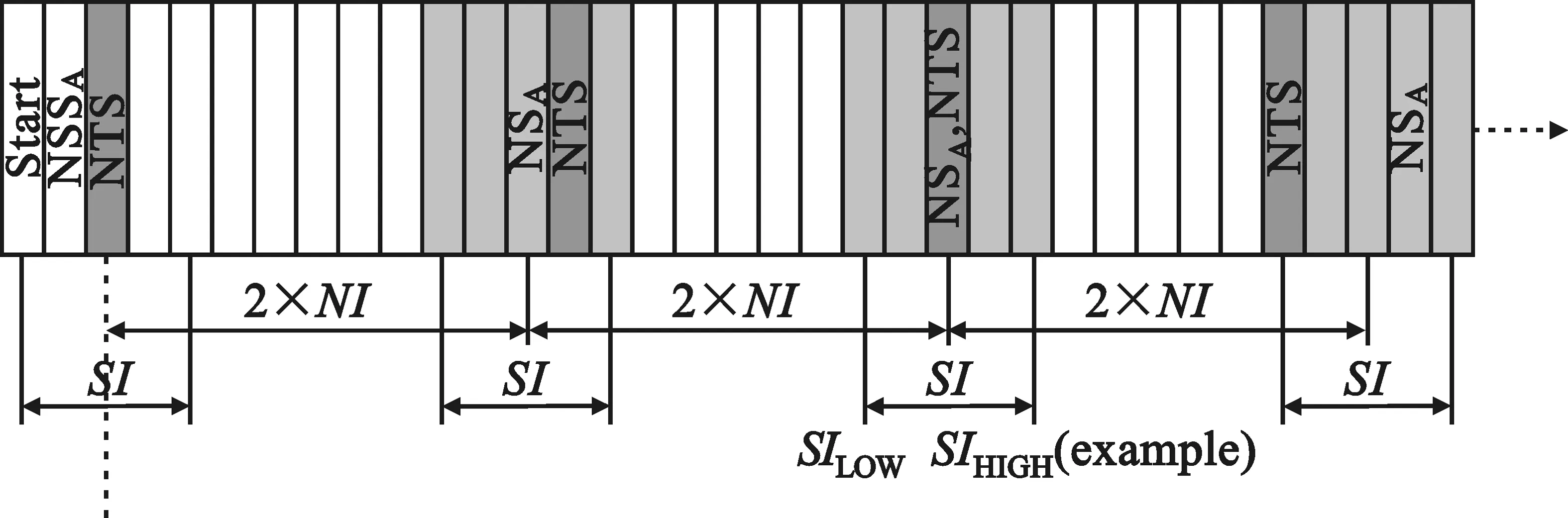
图2 基于SOTDMA时隙接入Fig.2 Slot map accessed using SOTDMA
在图2中涉及以下参数的定义:
(1)计划开始时隙(Nominal Start Slot,NSS):被AIS设备用来发射信息并宣布进入AIS子网络的第一个时隙为计划开始时隙,其它随后的发射时隙选择是以NSS为基准的。
(2)计划时隙(Nominal Slot,NS):为候选发射时隙区域的中心点,在一超帧的起始发射时隙上,NSS和NS是相等的。NS的计算公式如下:
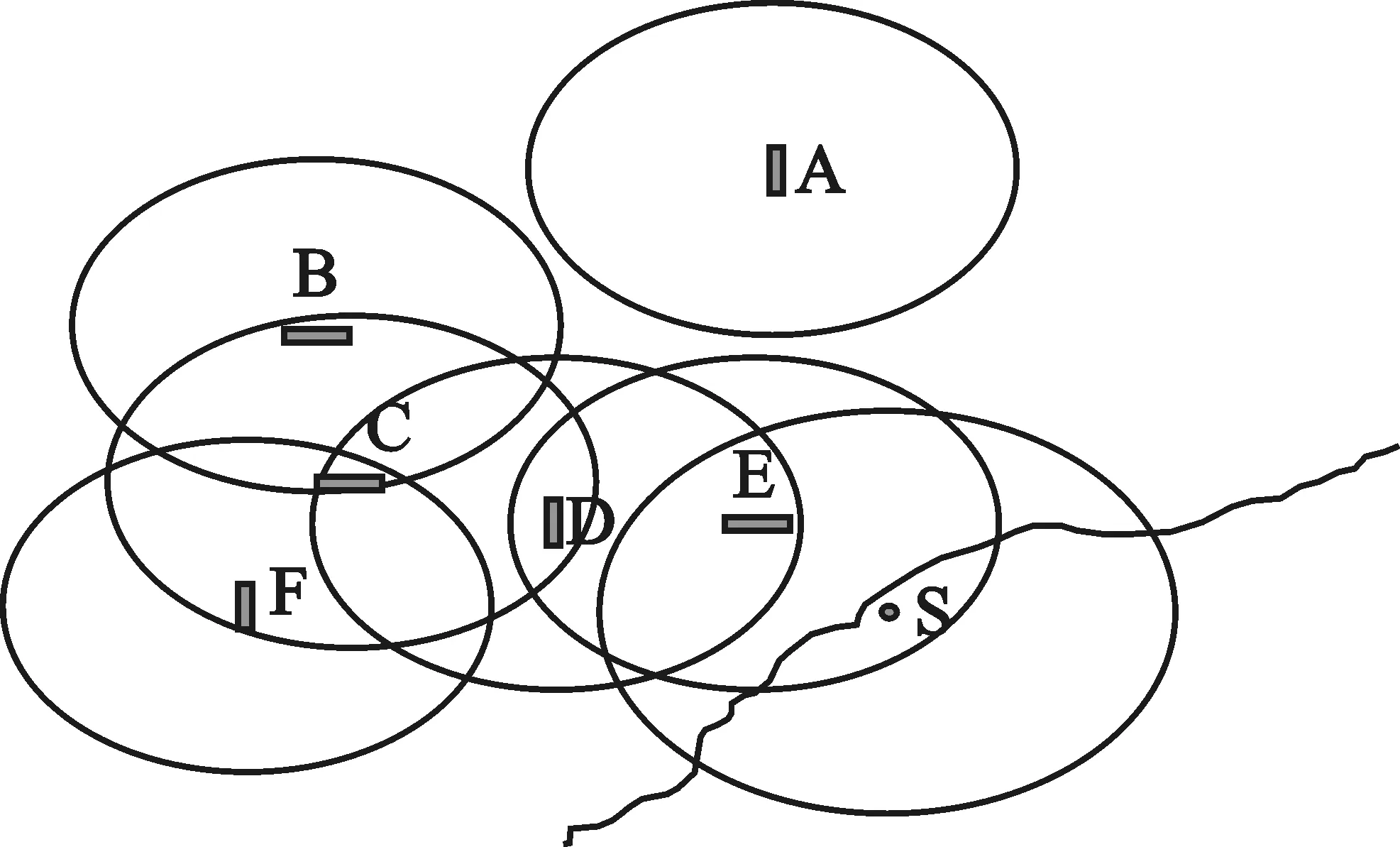
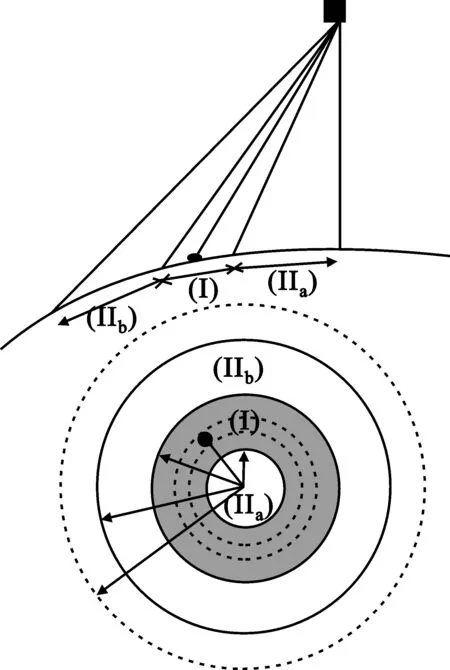
NS=NSS+n×NI,0 (1) 式中,n是一个整数,Rr是设备在每一帧中的位置报告率,NI是计划时隙增量。 位置报告率Rr与报告间隔ΔT的关系为 (2) 计划时隙增量NI计算如下: (3) 式中,2 250为每个信道划分为1 min长的超帧时隙数。 (3)选择范围(Selection Interval,SI):候选发射时隙的选择范围,其中心为计划时隙,选择范围为 SI=NS-0.1×NI,NS+0.1×NI (4) (4)计划发射时隙(Nominal Transmission Slot,NTS):最终在选择范围内确定的发射时隙为计划发射时隙。 SOTDMA算法简单描述如下: (1)根据当前信息报告率确定通常的计划时隙增量NI; (2)根据计划时隙增量确定选择范围; (3)根据时隙信息内容确定时隙的time-out值;time-out值确定了需要占用本时隙重复发射信息的次数,time-out值是在3~7之间选择的; (4)选择下一个NS和NTS; (5)等待NTS的到来; (6)在NTS内发射信息; (7)当信息报告率未改变时,返回到步骤5等待进行下一次发射; (8)当改变信息报告率时,返回到步骤1开始新一轮的自主时隙选择和发射过程。 船载AIS设备由于受自身高度和发射功率的限制,作用距离一般为30~40 nmile。船载AIS设备间实际运行如图3所示。 图3 AIS实际运行示意图Fig.3 The real situation of the AIS 船载AIS设备在开电源工作时,将用1 min时间监视VDL信道,以确定该信道的活动性、加入到AIS子网络中的其它设备的ID、当前时隙的分配情况、其它设备所报告的位置以及存在的基站设备。在这段时间内,将建立一个工作在AIS子网中的所有成员的动态目录,并构造一个反映该子网的TDMA信道活动情况时隙帧图。在此基础上,每个船载AIS设备根据自身的发射时隙安排,有规律地进入AIS子网络信道中发射。 在图3中,船载A设备不与其它船载设备通信;船载B设备与船载C、D、F设备相互通信,因此,它们之间按照一定的规则(SOTDMA)协同工作;船载D、E设备还与岸基站S设备保持通信。可以想象,如果更多的船载设备参与通信,实际的运行图将更加复杂;然而,SOTDMA信道进入协议可处理大规模船舶间的协同通信。 在AIS数据链负载饱和情况下,船载AIS设备具有降低它们之间通信范围的能力,以便保留有限的时隙资源,给相互较近的船载设备通信,避免船舶间的碰撞。 为了有效进行星载AIS接收冲突分析,首先必须对卫星对地观测区域进行合理简化,简化模型如图4所示。 图4 AIS网络简化模式示意图Fig.4 Organized areas simplification 在某个AIS子网,船载AIS设备间通信由于统一采用了SOTDMA接入协议,有效避免了相互间的发射冲突。但对星载AIS传感器的覆盖范围来说,可以作用多个AIS子网。为了便于分析,我们这里定义规则区域,每个规则区域的作用范围是40 nmile;在一个规则区域内,所有船载AIS设备是有组织和有规则地参与发射,避免发射时隙的冲突;而不同规则区域内船载AIS设备是相互独立发射的,其发射时隙是有可能重叠或冲突的。 从图4中可以看出,卫星AIS的的观察区域包括M(m)个各自独立的规则区域,每一个规则区域包含N(n)个船舶,m指示为规则区域的第m个子区域,n指示为在m规则区域内的第n个船舶,该n个船舶的位置发射时间间隔定义为ΔT。这样,在整个卫星观察区域内的总船舶Ntot为 (5) 在一个规则区域内最大可能拥有的船舶数由下式决定: (6) 式中,nch是独立用于系统发射的频道,针对AIS系统,nch为2;2250是1 min的时隙划分数;Rr是位置报告率,假设在一个规则区域内的所有船舶具有一样的位置报告率;针对不同的位置发射时间间隔ΔT,可以计算出一个AIS规则子网络所拥有的船舶数量。 每一个SOTDMA设备产生的时隙选择图都严格限制在以自己为中心的最大作用范围内,这个范围是由射频相关参数决定的。每个AIS设备的传输时隙是在这个范围内考虑了其它AIS设备的传输时隙而智能选取的。通常,每个AIS设备都有反映信道实际工作情况的时隙选择图,这意味着在同一规则区域内两个不在同一位置的AIS设备,它们拥有的时隙选择图是不同的;在不同的规则区域内的AIS设备,它们拥有的时隙选择图是有可能相同的。 针对星载AIS接收传感器,通过逻辑分析可以得出,发生接收时隙冲突的机制有以下两种: (1)从不同的AIS规则子网在相同的时隙内发送AIS信息,在星载AIS接收端同时接到; (2)从不同的AIS规则子网在不同的时隙发送AIS信息,但由于发送信号所走路径的不同,导致在星载AIS接收端同时接到。 在AIS相关标准中[6-7],信息格式规定了12 bit的距离延时缓存位,用于防止相邻时隙发送的AIS信息的相互重叠,确保在同一AIS规则子网中信息接收的完整性,该系统延迟保护距离为202 nmile。图5显示了星载AIS的运行高度为600 km时的几何覆盖范围。 图5 星载AIS在600km高度的几何示意图Fig.5 Geometry showing the relation for an AIS sensor at 600 km altitude 通过余弦定理可以计算出卫星与地球垂直点到延迟保护距离增大为202 nmile后点的覆盖距离NM约为400 nmile(394 nmile),这意味着卫星的扫描宽度在800 nmile范围内时,在分析接收时隙冲突时,只考虑第一种接收时隙冲突机制发生作用。 当卫星的扫描宽度在800 nmile范围外时,在分析接收时隙冲突时,还需考虑第二种接收时隙冲突机制发生作用。 图6显示了星载AIS的观察几何模型,图中各参数的意义如下:Hsat是星载AIS的运行高度,Rs是星载AIS与某观察AIS子网内目标的直线距离,Rshorizon是星载AIS与地球切线的直线距离,Rsmax是星载AIS扫描宽度边缘点与卫星的直线距离(Rsmax≤Rshorizon),ΔR=202 nmile是延迟保护距离。 图6 星载AIS的观察几何模型图Fig.6 The observation geometry for the system 从图6中可以看出:在区域Ⅰ(阴影部分)中,有关AIS规则子网到星载AIS传感器的传输距离都遵守延迟保护距离,只考虑第一种接收时隙冲突机制发生作用。 在区域Ⅱa中,AIS规则子网到星载AIS传感器的传输距离将超出AIS系统延迟保护距离,有些AIS信息可能提前到达星载AIS传感器,产生接收时隙冲突;在区域Ⅱb中,AIS规则子网到星载AIS传感器的距离也将超出AIS系统延迟保护距离,有些AIS信息可能迟后到达星载AIS传感器,产生接收时隙冲突;第二种接收时隙冲突机制将发生作用。 在进行理论分析时,我们假设星载AIS到达同一AIS规则子网各边是相同距离;图7是图6简化后的星载AIS几何扫描图,每个小的栅格表示40 nmile×40 nmile的小型正方形。从图7中也可以看出:星载AIS运行在600 km高度时抵达地球切线的可视范围;为了计算的方便和简化,这里假设可视范围是正方形,每一个AIS规则子网简化为40 nmile×40 nmile的小型正方形,这样,总的可视范围包含5 184个小型正方形(72×72),组成2 880 nmile的扫描宽度。 图7 星载AIS的观察简化模型图Fig.7 The quadratic observation area for an AIS sensor at 600 km altitude with FOV to the horizon 当星载AIS传感器采用传统天线时,其覆盖的区域大于800 nmile时,需要同时考虑两种接收时隙冲突机制的作用,因此,在实际设计星载AIS传感器设备时,需要慎重考虑接收天线的型式。 当星载AIS传感器的扫描宽度限制在800 nmile以内,只需要考虑第一种接收时隙冲突机制的影响。在本文中将扩展星载AIS的扫描宽度在800 nmile以外,因此,需要同时考虑两种接收时隙冲突机制的影响。 针对任意AIS规则子网,在其观测时间和间隔报告时间相等(Tobs=ΔT)条件下,任一AIS规则子网内指定的船载AIS设备的发射时隙与该卫星覆盖区域内其它AIS规则子网内的任一船载AIS设备的发射时隙无碰撞的概率PΔT为: (1)若指定的AIS规则子网在卫星覆盖区域I中,其船舶发射时隙无碰撞的概率为 (7) (2)若指定的AIS规则子网在卫星覆盖区域Ⅱa和Ⅱb中,其船舶发射时隙无碰撞的概率为 (8) 式中,N是每个AIS规则子网实际包含的船舶数量,Nmax是AIS规则子网最大可能包含的船舶数量,M是整个卫星观测区域内包含的AIS规则子网数量,Ntot是整个卫星观测区域内包含的船舶数量,nch=2是AIS系统拥有的独立信道数。 插入因子k为 (9) (10) (11) (12) 在引入平均概率、独立概率等概念后,式(10)可以简化为 (13) 式中,s是交联因子,描述了在卫星覆盖区域内的任意船舶与区域IIa和IIb中的船舶的关系,计算如下: (14) 因此,s是星载AIS传感接收器高度Hsat和扫描宽度ΔS的函数。 利用幂级数展开公式和近似公式对式(13)进行简化,并考虑到如果只有第一种接收时隙冲突机制发生作用,s=0,可得: (15) 从上述公式可以看出:简化了的船舶发现概率形式上是不受星载AIS传感接收器高度Hsat和扫描宽度ΔS影响的,因此,船舶发现概率主要受覆盖区域内船舶数量Ntot和观察时间Tobs的影响。 利用本文前述的理论及公式,并结合MATLAB 7.5的仿真平台,编写了若干.m文件,对星载AIS接收冲突概率进行了模拟仿真。 在设计模拟仿真程序时,首先归一化和假设如下: (1)在AIS规则子网中船舶数量是一样的,都为N; (2)在观察区域内有M个AIS规则子网,这样总船舶数为Ntot=N×M; (3)在观察区域内船舶的位置报告间隔是一致的,都为ΔT; (4)观察区域是正方形。 下列算法将应用于仿真程序中: (1)在每个AIS规则子网中,对所有船舶指派计划开始时隙; (2)在相应的候选发射时隙的选择范围(SI)中采用随机法选择每个发射时隙,避免发射时隙的冲突; (3)在卫星观察区域所包含的所有AIS规则子网都重复步骤1~2; (4)在上述步骤基础上,同时考虑两种冲突机制发生的可能,对整个卫星观察区域计算船舶的发现概率; (5)多次重复步骤1~3,进行统计试验; (6)通过多次统计试验,计算船舶的平均发现概率。 星载AIS接收冲突概率模拟仿真程序主要由InterferenceAnalysis.m文件和下列函数组成,包括F-DetectionProbability.m 函数、F-InitorganizedAreas.m函数、F-reservedSlot.m函数等;同时,在上述.m文件中,对模拟仿真过程中涉及到的各类常数、全局变量进行了设置和定义,并通过主文件来调用函数文件。有关仿真结果如图8所示。 图8 船舶侦测概率与船舶数量的关系图Fig.8 Ship detection probability vs. the number of ships for different swath widths 从仿真结果可以看出: (1)在1 000艘左右船舶条件下,星载AIS的发现概率为99%左右; (2)增加卫星扫描宽度,意味着增加了卫星观测时间,因此,也就给定了船舶分布数量和覆盖区域; (3)卫星覆盖区域直径从80、200、400、 600、到800 nmile时,星载AIS的接收冲突概率是覆盖区域内船舶数量的函数; (4)增加卫星的扫描宽度也就是增加了覆盖区域内的船舶数量,因此,要使星载AIS的接收冲突概率增大,优化卫星的扫描宽度将是关键因素。 另外,从图9的仿真结果中也可以看出:采用对消技术与否对星载AIS的接收冲突概率也有较大的影响。 图9 采用对消技术比较图Fig.9 Comparison of the detection probability of a conventional AIS receiver with interference cancellation 本文对星载AIS所涉及到的接收冲突问题及概率进行了分析和论证,建立了基于星载AIS系统的观察、分析模型,理论分析了星载AIS接收冲突概率并给出了接收冲突概率公式,对相关理论结果进行了Matlab仿真,并通过分析得出以下结论:星载AIS传感器接收AIS信息是可行的,船舶发现概率主要受覆盖区域内船舶数量Ntot和观察时间Tobs的影响,这对更深入地论证、设计星载AIS传感接收器设备、卫星的运行轨道等具有一定的指导和参考意义。 参考文献: [1] Eriksen T, Hye G, Narheim B, et al.Maritime Traffic Monitoring Using a Space-Based AIS Receiver[J]. Acta Astronautica,2005,58(10):537-549. [2] ITU-RWP8B,Satellite Detection of AIS Messages[S]. [3] Miguel A Cervera, Alberto Ginesi. Satellite-based AIS System Study[C]//Proceedings of the 26th International Communications Satellite Systems Conference (ICSSC). San Diego, CA:IEEE, 2008:1-6. [4] John Stolte, Anthony Robinson. Space based monitoring of global maritime shipping using Automatic Identification system:US,2008/0088485 A1 [P]. 2008. [5] 何民, 许斌, 钟杰. 基于卫星的AIS接收链路设计及仿真[J].电讯技术,2010,50(9):114-118. HE Min, XU Bin, ZHONG Jie. Design and simulation about AIS receiver link in LEO satellite[J].Telecommunication Engineering,2010,50(9):114-118.(in Chinese) [6] ITU 1998-2001,Recommendation ITU-R M.1371-1: Technical Characteristics for a Universal Shipborne Identification System using Time Division Multiple Access in the VHF Maritime Mobile Band[S]. [7] ITU-RM.1371-1,I ALA: Technical Clarifications on ITU Recommendation[S].
2.2 船载设备的通信范围
2.3 观察模型


2.4 接收冲突机制分析


2.5 相关推导





3 仿真实现及结果分析
3.1 仿真条件
3.2 仿真及分析
4 结 论
猜你喜欢
计算机时代(2023年1期)2023-01-30
舰船电子对抗(2020年2期)2020-06-23
中国新通信(2019年21期)2019-03-30
铁道通信信号(2018年9期)2018-11-10
舰船电子对抗(2016年3期)2016-12-13
网络安全和信息化(2016年2期)2016-11-26
广西大学学报(自然科学版)(2016年5期)2016-11-12
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
