
舰船用两级行星传动系统的固有频率啮合刚度敏感度分析
2010-09-22 07:15赵永强李瑰贤
船舶力学 2010年1期
赵永强,李瑰贤 ,常 山,张 祥
(1哈尔滨工业大学机电工程学院,哈尔滨 150001;2中船重工集团第703研究所,哈尔滨 150036)
1 引 言
行星齿轮传动系统应用非常广泛,它的动力学分析对减振降噪具有重要的指导意义。固有频率对系统参数的敏感度能够为系统响应的降低、结构设计的优化提供重要的依据。选择调节好系统参数可以平衡各设计目标。
有些文献已经对单级行星齿轮传动系统的固有频率参数敏感度进行了研究,Botman[1]和Cunliffe[2]研究了行星轮支撑刚度变化对系统固有频率的影响,Kahraman[3]使用纯扭转模型研究了啮合与支撑刚度对系统固有频率的影响,Saada和Velex[4]研究了自由振动齿圈支撑刚度对系统固有频率的影响,Lin和Parker[5]系统地研究了啮合与支撑刚度、齿轮质量与转动惯量、行星架转速等参数对系统固有频率的影响。
本文对大型舰船机械装置中常用的两级人字齿行星齿轮系统进行了固有频率敏感度的分析,文中主要对啮合刚度的敏感度进行了系统的研究,得出了各振动模态中固有频率随参数变化的情况。
2 系统动力学模型
本文使用自己建立的模型,建模时采用集中参数法。齿轮均为人字齿轮,中心轮浮动,不考虑齿间侧隙的影响。整个系统由行星轮系和行星架固定的星形轮系相互联接而成。
由于采用人字齿的结构型式,所以只需考虑三个方向的自由度。系统共有3×(M+2+N+3)个自由度(M、N分别为星轮和行星轮个数),系统的自由振动的动力学方程为
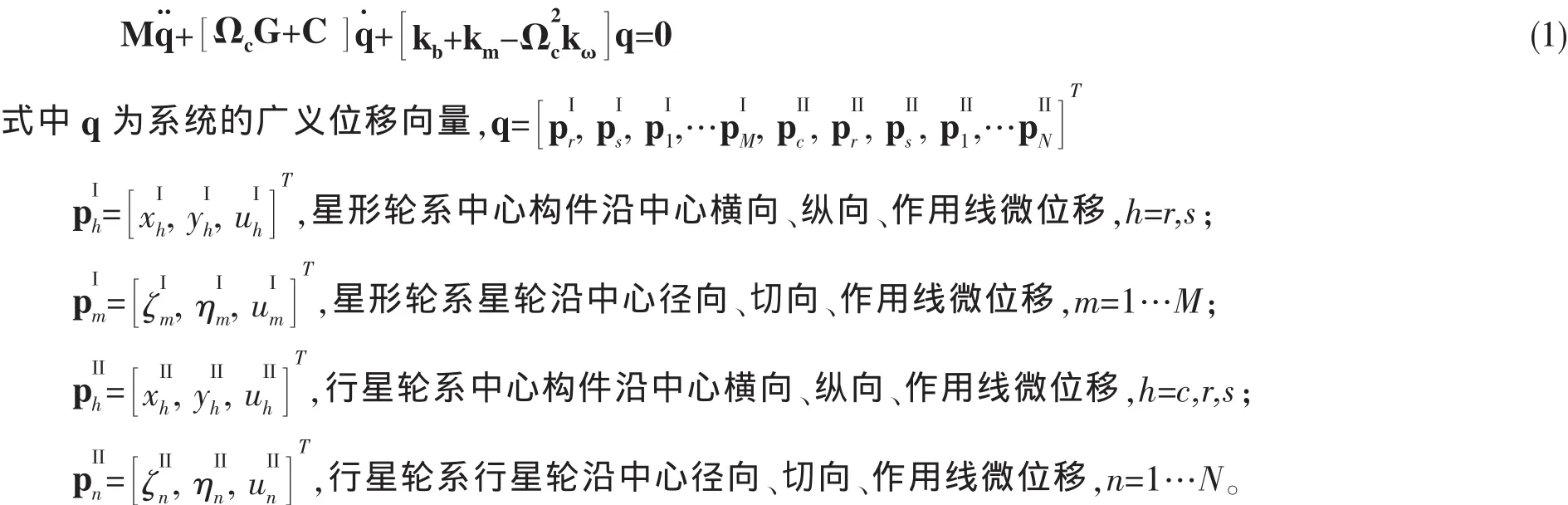
式中,M、G、C、kb、km、kω分别为系统的质量矩阵、陀螺矩阵、阻尼矩阵、支撑刚度矩阵、啮合刚度矩阵和向心刚度矩阵。
3 特征值敏感度的计算方法
特征值敏感度分析主要是计算固有频率和振动模态对系统参数的导数,这里只研究对动态特性影响较大的系统参数,如啮合刚度。考察下式的特征值问题

本文使用模态法来计算系统的特征值的导数,再根据固有频率与特征值导数之间的关系,就可以计算出各系统参数对固有频率的敏感度。
特征值为单根时的敏感度为

特征值为重根时的敏感度为

上述公式中各量的具体描述详见文献[5]。
4 啮合刚度敏感度
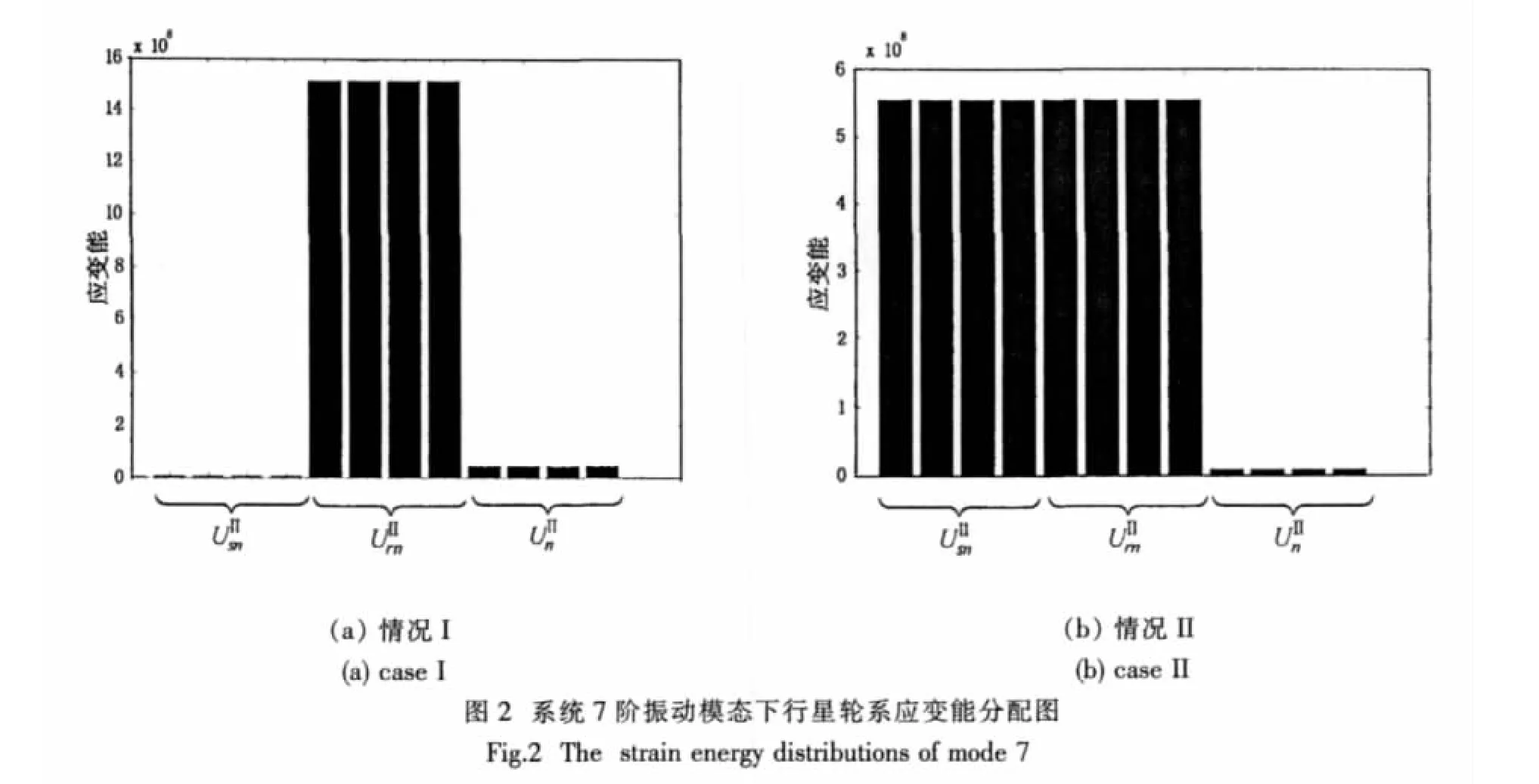
所研究的啮合刚度包括行星轮系与星形轮系中各对互相啮合的齿轮,其中某些刚度的敏感度与其相应的模态应变能对应,接下来的分析可以验证这一现象。
4.1 行星轮系太阳轮与行星轮啮合刚度敏感度
4.1.1 可调谐系统

对于耦合轮系振动模态,系统的固有频率均为单根,将公式(7)代入(3)、(4)式,并利用下式

可以得到单根情况下特征值敏感度的计算公式:


行星轮系统振动模态中,特征值为重根,只考虑 λ1=λ2的情况,λ1′、λ2′为(5)式中矩阵 D 的特征值,将(7)式代入(5)式,得

在单级行星齿轮传动系统的平移(直齿)或径向平移—扭摆(斜齿)振动模态中但在本文研究的两级人字齿行星传动系统中,此种情况不成立。而在N>3时才出现的、重数为N-3的固有频率振动模态下,有λ1,2′在 N=4 和 N=5 的情况下才可以写成(9)式的形式;N>5 时矩阵D的特征值很难求得封闭解,需采用数值方法。
对于星形轮系振动模态,当星轮个数M≤3时,特征值为单根,M>3时出现重数为M-3的特征值,但无论对于单根特征值还是重根特征值,均有(行星轮系不振动),所以,固有频率对的敏感度均为零。

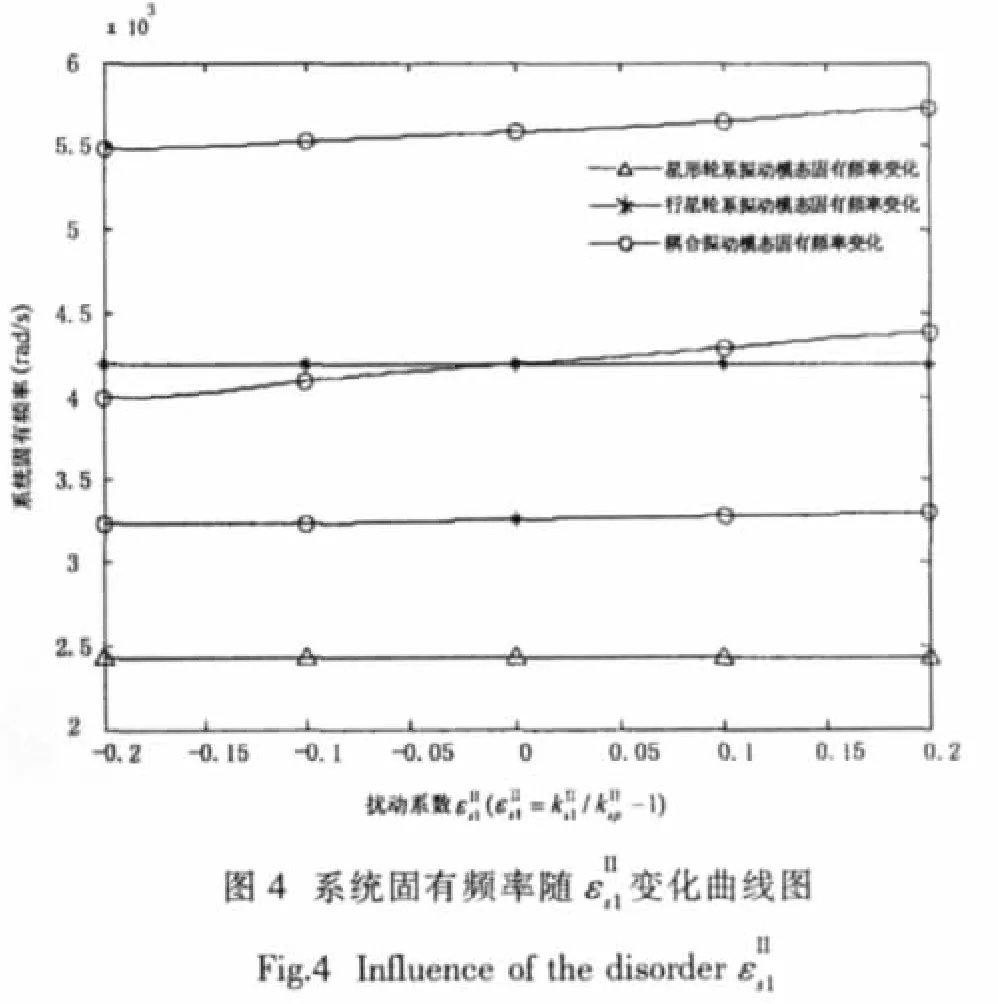
本文以大功率舰船用两级人字齿行星齿轮传动系统为例(见表1),研究其固有频率对的敏感度。
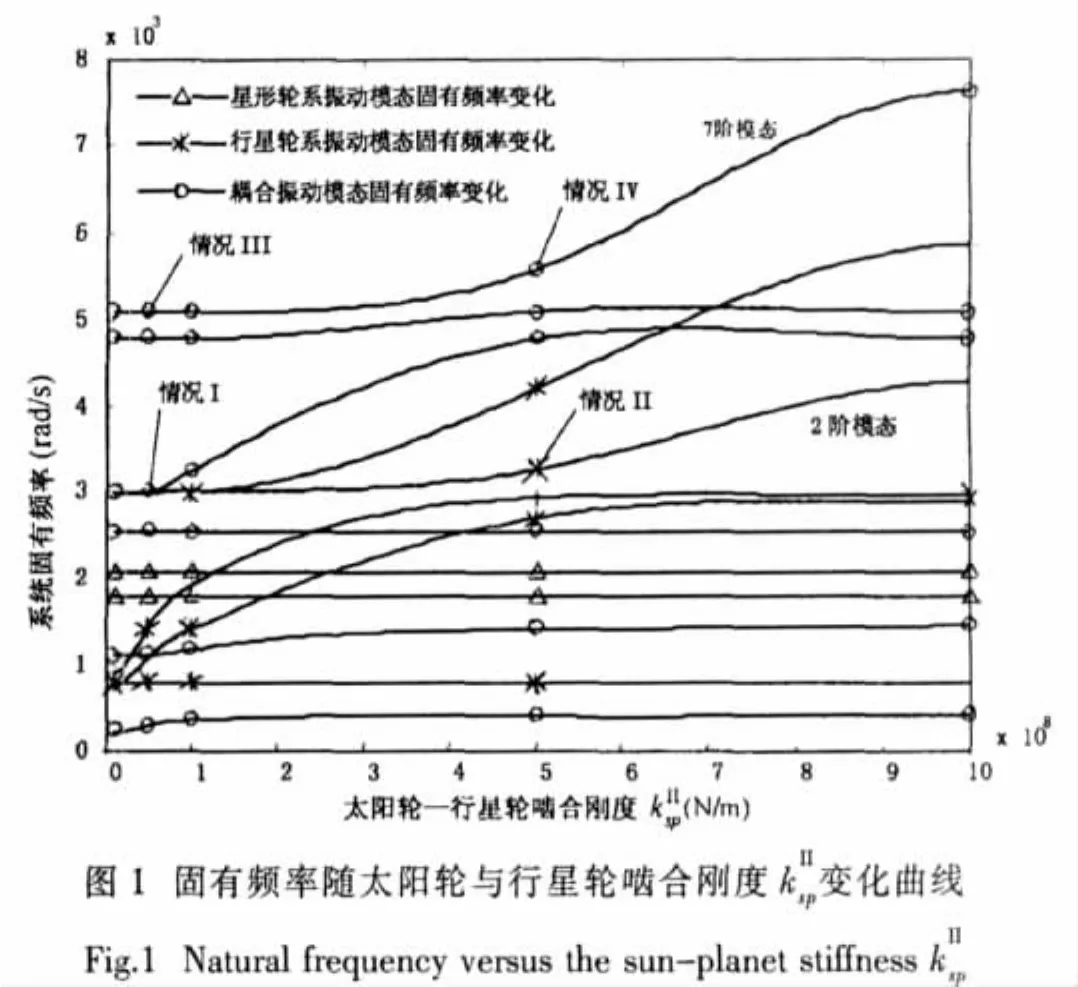
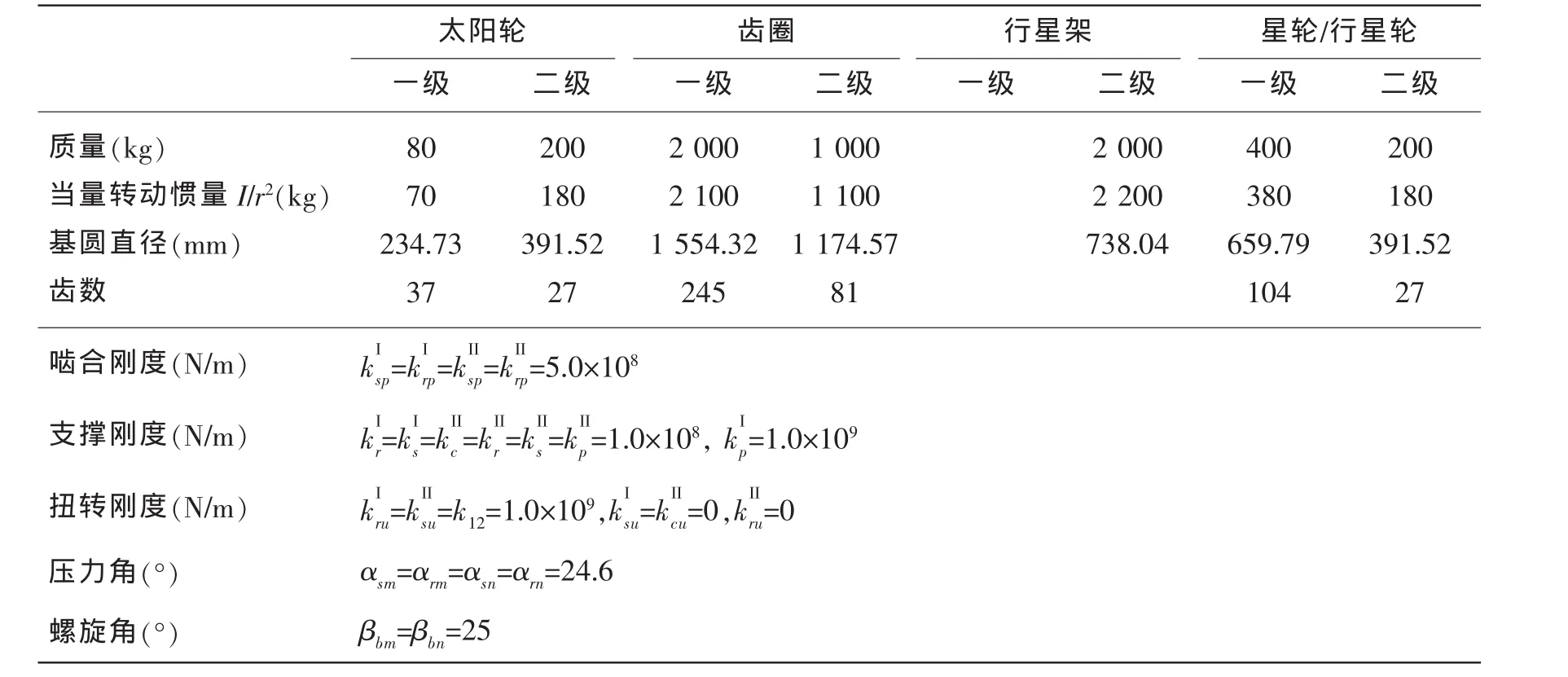
表1 系统参数表Tab.1 Model parameters of two stage double tooth planetary gear trains

4.1.2 不可调谐系统
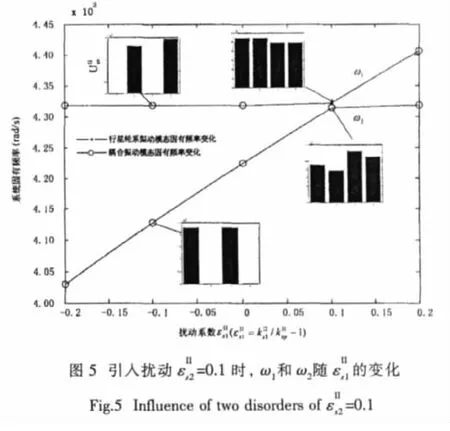
在实际的行星齿轮传动中,由于行星轮的加工装配误差、与太阳轮接触齿数的变化等因素的影响,使得各行星轮与太阳轮间的啮合刚度产生差异,从而使整个系统变得不可调谐。所以,有必要研究非调谐情况下,行星轮与太阳轮啮合刚度变化对系统模态特性的影响。假定只有第一个行星轮与太阳轮啮合刚度发生变化,系统质量矩阵和刚度矩阵对的导数为:

对于耦合轮系振动模态,固有频率均为单根,利用(3)、(4)式得特征值敏感度计算公式如下:


对于行星轮系振动模态,系统固有频率为重根,先考虑λ1=λ2的情况,选取任意的正交模态振型为Γ=[γ1,γ2],符号表示在模态γi下太阳轮与第一个行星轮啮合的弹簧变形量,这一定义类似于在模态φi下的太阳轮与行星轮啮合的弹簧变形量(5)式中矩阵 D 及其特征值 (λ1′、λ2′)为

对于星形轮系振动模态,第二级行星轮系无振动,所以系统固有频率对的敏感度均为零。
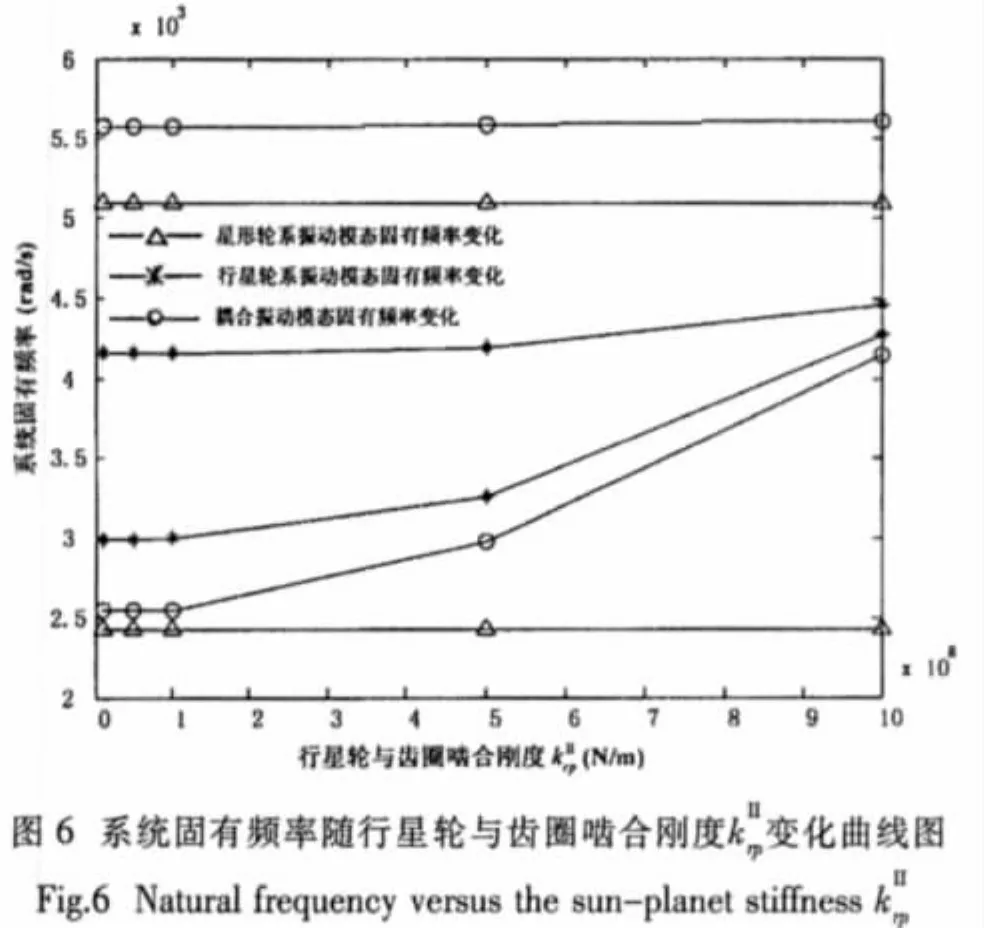
4.2 行星轮系行星轮与齿圈啮合刚度敏感度
4.2.1 可调谐系统
使用4.1.1节中类似的方法,可以得到各振动模态下固有频率敏感度的计算公式,这里只给出耦合振动模态下的计算公式:
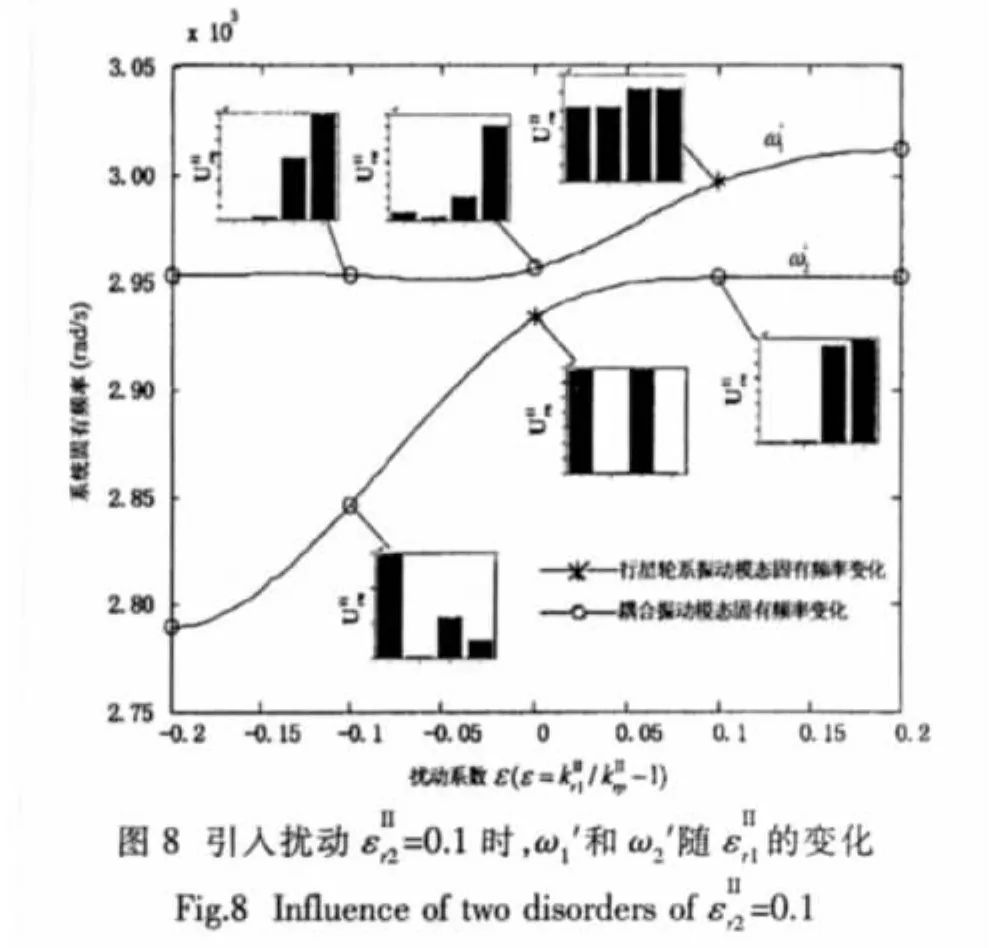
4.2.2 不可调谐系统
特征值敏感度的计算分析方法与4.1.2节类似,这里不再给出具体的计算公式。
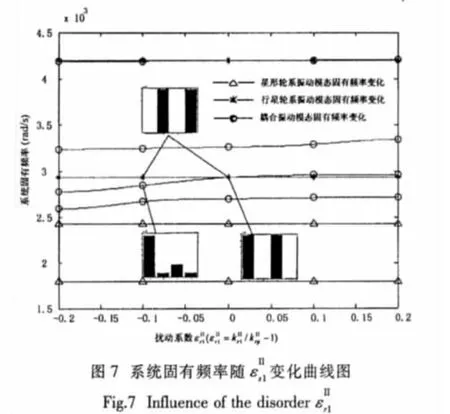
4.3 星形轮系啮合刚度敏感度
星形轮系固有频率对啮合刚度的敏感度计算,类似于行星轮系,这里不再详述。
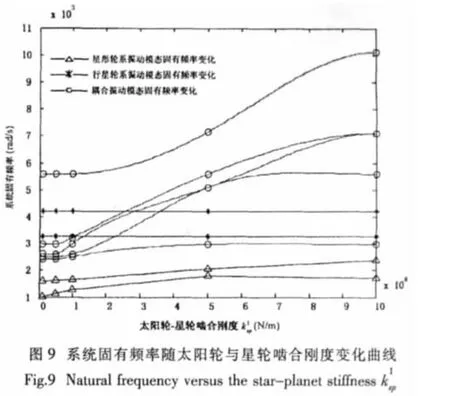
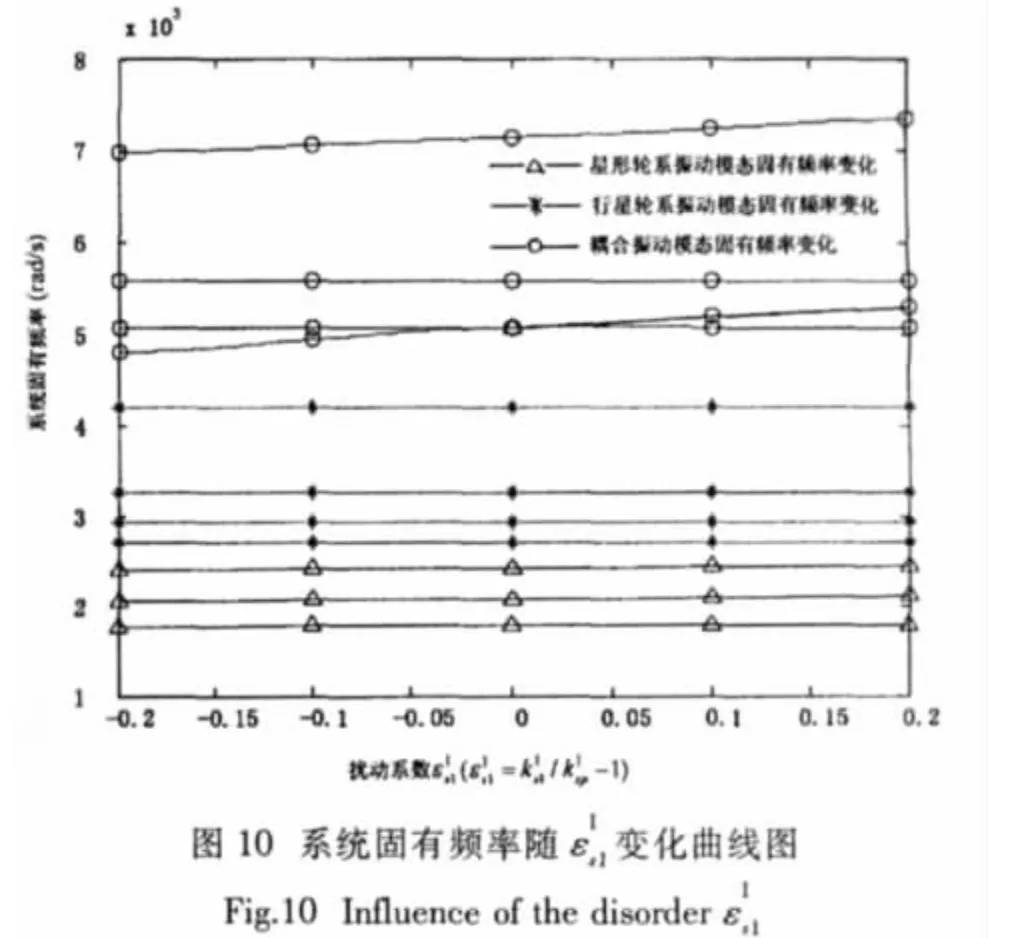
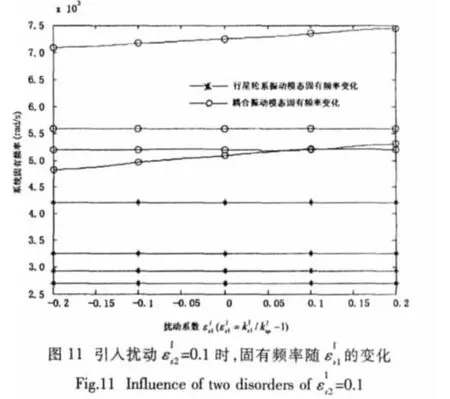
系统固有频率随星形轮系太阳轮与星轮啮合刚度的变化如图9所示,从图中可以看出的变化对耦合振动模态固有频率的影响最大,对行星轮系没有影响。引入扰动后的变化只对耦合振动模态的固有频率有影响,但影响明显变小(图10)。引入参数后,系统无星形轮系振动模态的变化只对耦合振动模态的固有频率有影响,但影响很小(图11)。
5 结 论
(1)利用两级人字齿行星传动的振动模态特性,对敏感度的计算公式进行了简化,并建立了敏感度与模态应变能的关系;
(2)通过应变能的变化反映出了固有频率的变化趋势,得到了各振动模态中固有频率随系统各啮合刚度的变化规律,从而为系统振动的减小和结构的优化提供了重要的参考数据。
[1]Botman M.Epicyclic gear vibrations[J].ASME Journal of Engineering for Industry,1976,96:811-815.
[2]Cunliffe F,Smith J D,Welbourn D B.Dynamic tooth loads in epicyclic gears[J].ASME Journal of Engineering for Industry,1974,94:578-584.
[3]Kahraman A.Natural modes of planetary gear trains[J].Journal of Sound and Vibration,1994,173:125-130.
[4]Saada A,Velex P.An extended model for the analysis of the dynamic behavior of planetary trains[J].ASME Journal of Mechanical Design,1995,117:241-247.
[5]Lin J,Parker R G.Sensitivity of planetary gear natural frequencies and vibration modes to model parameters[J].Journal of Sound and Vibration,1999,228:109-128.
猜你喜欢
数学物理学报(2021年5期)2021-11-19
装备制造技术(2021年5期)2021-08-14
大电机技术(2021年2期)2021-07-21
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
数学物理学报(2018年3期)2018-07-17
制造技术与机床(2017年7期)2018-01-19
陶瓷学报(2015年4期)2015-12-17
东北电力大学学报(2015年1期)2015-11-13
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01
