
基于模糊位置控制器的研究*PID
2010-09-13 09:25李旭伟
湖州师范学院学报 2010年2期
李旭伟
(海军驻杭州地区军事代表室,浙江杭州310012)
基于模糊位置控制器的研究*PID
李旭伟
(海军驻杭州地区军事代表室,浙江杭州310012)
介绍了电液位置伺服控制系统的组成和工作原理.传统PID控制器在受到外界干扰时,容易导致过大的超调甚至引起震荡,从而使得系统的动静态性能变差.针对此问题,设计了结合PID控制和模糊控制优点的模糊PID控制器.在MA TLAB/Simulink环境下进行仿真,结果表明,与传统的PID控制器相比,该方法改善了系统的动静态性能,同时也提高了控制系统的鲁棒性和抗干扰性.
模糊PID控制;仿真;Simulink
0 引言
PID控制是比例、积分、微分控制的简称,当被控对象的数学模型已知时,PID控制就显得特别有用.在实际应用中,大多数工业过程都不同程度地存在非线性、参数时变性和模型不确定性,采用传统的PID控制无法实现对过程的精确控制.本文将模糊控制与PID控制相结合,构成模糊PID控制法,使其既具有模糊控制灵活、适应性强的优点,又具有PID控制精度高的特点[1].
1 位置控制器的设计
1.1 电液位置伺服控制系统的组成
电液位置伺服系统组成如图1所示,主要由控制器、放大器、伺服阀、液压缸和位置传感器组成.

图1中R为给定值,Y为液压缸输出位移,经过位置传感变送器与给定值R作比较,产生误差信号.控制器内预置的控制算法对误差信号进行运算,其输出信号经过放大器放大后控制伺服阀,伺服阀将放大器送来的电信号转变为伺服阀的阀芯位移,通过伺服阀的流量变化来控制液压缸活塞的伸缩位移,驱动工作台向消除偏差的方向运动.
1.2 模糊PID控制器的设计
模糊PID控制算法以误差E和Ec为输入,利用模糊控制规则在线对PID参数进行修改,以满足不同时刻的E和Ec对PID参数的要求,输出为Kp,Ki,Kd.其结构如图2所示[2,3].
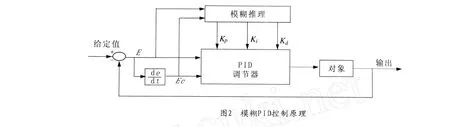
该控制系统是一个两输入三输出的形式,输入变量为E和Ec,输出变量为Kp,Ki和Kd,其调整原则为:
(1)当误差|E|较大时,为使系统具有较好的快速跟踪性能,不论误差的变化趋势如何,都应该取较大的Kp和较小的Kd,同时为避免系统响应出现较大的超调,应对积分作用加以限制,取较小的Ki值.
(2)当误差|E|处于中等大小时,为使系统响应具有较小的超调,Kp应取得小些,同时为保证系统的响应速度,Ki和Kd的大小要适中,其中Kd的取值对系统响应的影响较大.
(3)当误差|E|较小时,为保证系统具有较好的稳态性能,Kp和Ki应取得大些,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,当|Ec|较小时,Kd可取大些;当|Ec|较大时,Kd应取小些.
1.3 隶属度函数及模糊化
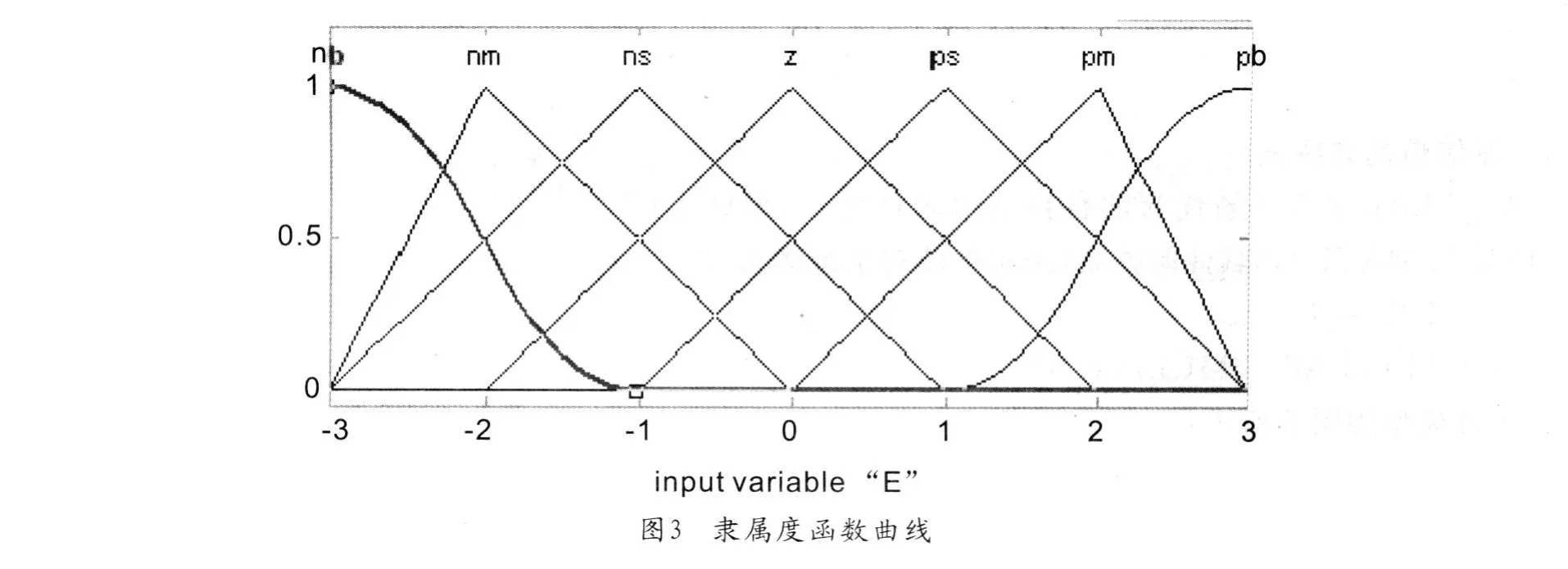
输入变量E,Ec,Kp,Ki和Kd语言值的模糊子集取为{负大,负中,负小,零,正小,正中,正大},并简记为{NB,NM,NS,ZO,PS,PM,PB},论域为{-3,-2,-1,0,1,2,3}.隶属函数采用三角形函数,其函数曲线如图3所示.
根据设计人员的经验,得到PID三个控制参数的模糊控制规则表,见表1~表3.
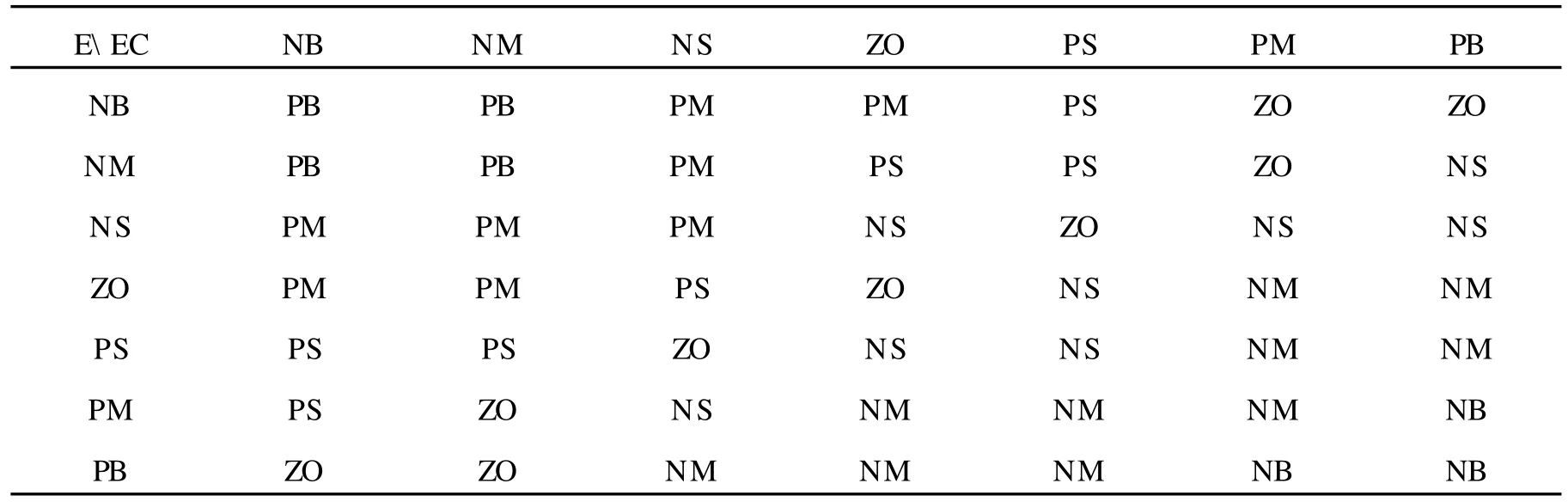
表1 Kp的模糊控制规则表
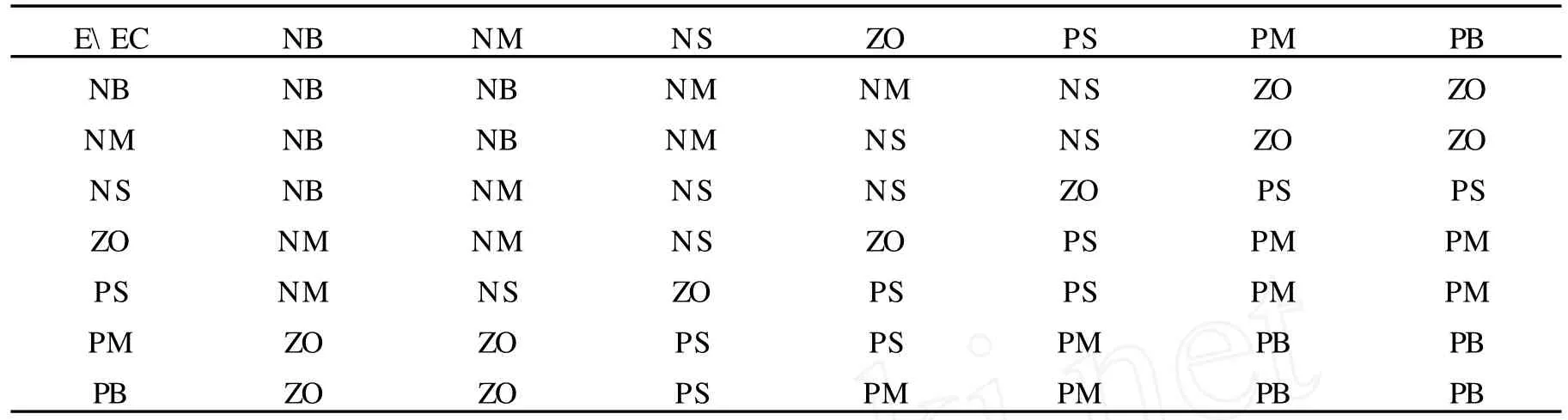
表2 Ki的模糊控制规则表
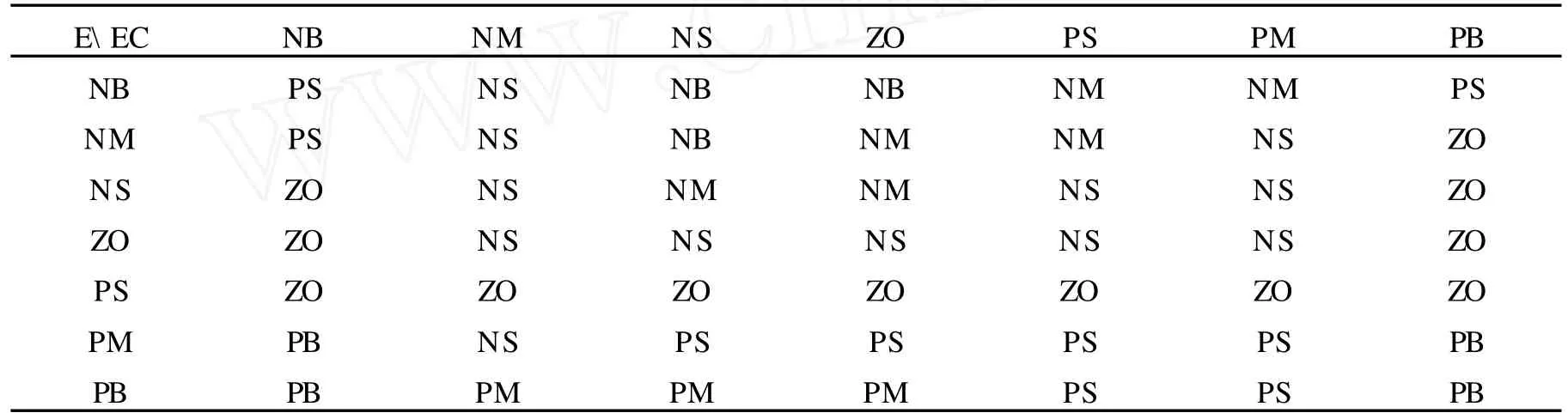
表3 Kd的模糊控制规则表
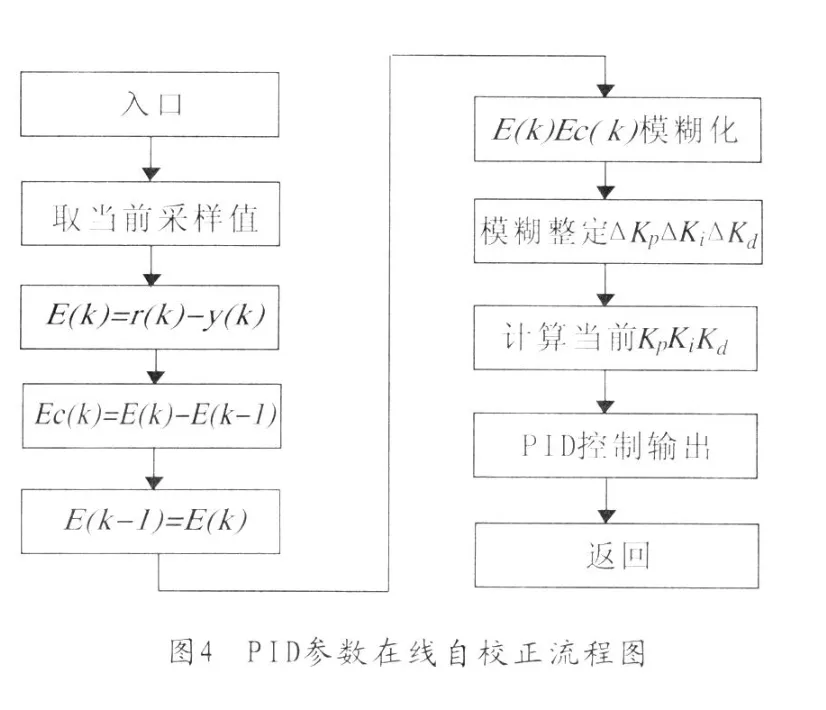
线运行过程中,控制系统通过对模糊逻辑规则的结果处理和运算,完成对参数的在线自校正.其工作流程图如图4所示.
2 MA TLAB/SIMUL IN K仿真和分析
2.1 系统仿真方块图
MA TLAB是当今最优秀的科技应用软件之一,SIMUL IN K是MA TLAB软件的扩展,是实现动态系统建模和仿真的一个软件包[4~6].
基于MA TLAB/SIM UL IN K图形化工具建立的模糊PID仿真模型如图5所示:

2.2 仿真结果
运行系统后,得到的仿真图如图6所示:

3 结论
模糊PID控制器将模糊控制和传统的PID控制相结合,在常规PID调节器的基础上加上模糊控制环节,它将传统的PID控制经验的优点和模糊控制的灵活性、自适应性相结合,比传统PID控制具有更好的动静态性能和抗干扰能力.
[1]赵永娟,孙华东.基于Matlab的模糊PID控制器的设计和仿真[J].微计算机信息,2009,25(1):48~49,40.
[2]胡晓磊,喻俊志.一种新型模糊PID控制器在伺服系统的应用[J].电力电子技术,2009,43(11):35~37.
[3]李晓豁,吴志强.基于参数自适应模糊PID控制器的掘进机恒功率调速系统[J].制造业自动化,2009,31(1):45~47.
[4]赵岩,张春晶.基于模糊PID控制器的汽车雨刮系统的研究[J].制造业自动化,2010,32(02):179~180,188.
[5]廖力达,王北战,章运奇.自适应模糊PID控制器的研究与应用[J].建筑机械(上半月),2009(8):59~62,68.
[6]董瑞洪,梁磊,任旭鹏.温度控制系统的无超调模糊——PID控制器设计[J].科学技术与工程,2009,9(2):267~271.
Abstract:This paper introduces the composition and p rincip le of the electro-hydraulic position servo control system.The traditional PID controller w ill show bad dynamic and static state capability w hen a disturbance happens.The design of the Fuzzy-PID controller combining the advantages of PID control and fuzzy control w ith simulation by the Simulink software show s that the Fuzzy-PID controller has a better dynamic and static state performance than traditional PID controller.
Key words:fuzzy-PID control;simulation;Simulink
A Research of the Position Controller Based on Fuzzy-PID
L IXu-w ei
(Office of Navy M ilitary Rep resentatives in Hangzhou,Hangzhou 310012,China)
TP332
A
1009-1734(2010)02-0060-04
2010-03-10
李旭伟,工程师,从事机械与自动化研究.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
冶金设备(2020年2期)2020-12-28
装备制造技术(2020年3期)2020-12-25
重型机械(2020年2期)2020-07-24
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
专用汽车(2016年4期)2016-03-01
石油化工建设(2015年6期)2015-12-01
