
机载激光雷达数据采集及数据处理
2010-09-05 12:44:24窦延娟张晓东
长江科学院院报 2010年1期
张 煜,窦延娟,张晓东
机载激光雷达数据采集及数据处理
张 煜1,窦延娟2,张晓东2
(1.长江科学院空间信息技术应用研究所,武汉 430010;2.武汉大学测绘遥感信息工程国家重点实验室,武汉 430079)
主要介绍了机载激光雷达从前期数据采集到制作DEM、正射影像的整个数据处理流程,包括数据采集前的准备工作、POS数据处理、原始影像处理、系统误差检校、LAS点云处理、DEM提取、正射影像制作,并且分析了各处理过程中要注意的问题。
机载激光雷达;数据采集;数据处理;DEM;正射影像
1 机载激光雷达
机载激光雷达(Airborne liDar,light detection and ranging)是一种集激光、全球定位系统和惯性导航系统3种技术于一身的空间测量系统(如图1所示)。该系统是将激光扫描仪、GPS接受机、惯性导航系统、数码相机及控制元件等搭载在载体飞机上。它通过主动向地面发射激光脉冲,接受地面反射回来的反射脉冲并同时记录所用时间,从而计算出激光扫描仪到地面的距离,结合POS系统测得的位置和姿态信息可计算出地面点的三维坐标。
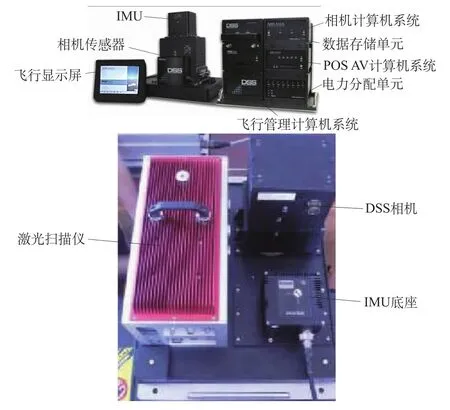
图1 机载激光雷达系统Fig.1 Airborne liDar system
与传统摄影测量相比,激光雷达能够直接获取目标的三维信息,缩短了从数据到有用信息的过程。另外激光雷达很明显的特征就是激光可以穿透植被叶面到达地表,同时获取地面和植被的信息,而且能够探测细小目标(如电力线),获取数据信息丰富,是目前其他技术所不及的。
2 数据采集
2.1 数据采集前的准备工作
在进行数据采集前需进行多方面周密的准备工作,主要包括申请空域、设计航线、布设地面基准站和选择检校场。
2.1.1 申请空域
在执行任何一个航摄任务前必须按规定向有关部门申请空域取得航飞权。在具有航飞权期间选择最好的天气进行飞行,这样可保证同时拍摄影像的质量。
2.1.2 设计航线
在设计航飞路线时,遵循安全、经济、周密、高效的原则,选用专门的航飞设计软件设计飞行路线,如Leica的FPES,IGI的WinMP,Riegl的TrackAir等。一般设计航线时,参考小比例尺的二维平面地形图,综合考虑测区的地形、地貌、机载激光雷达设备的参数(扫描角、扫描频率、相机镜头焦距、相机曝光速度等)、天气条件(云、雾、烟尘、降雨等)、航带宽度、航带重叠度及用户要求的点云密度,最终设计出达到项目精度要求的航线。设计良好的航线在满足精度要求的前提下能够节省时间,降低飞行成本。
2.1.3 布设地面基准站
在测区内布设一定数量的GPS基准站用于动态GPS定位,一般基站间距为30~50 km。根据加拿大Applanix公司的IN-Fusion技术,基准站间距可以达到70~100 km,将基站构建成SmarBase网解算GPS数据,可减小大气误差、电离层延迟误差、对流层延迟误差、卫星钟差及轨道差等。如果要采用这种方法解算GPS数据,则布设的GPS基准站需将整个测区包围,间距以70 km为宜。在测区中最好也布设1~2个基准站,用于数据处理后快速检测已知点与所测点云的绝对误差。
选择检校场:在采集数据之前或之后都要对设备进行检校,一般通过采集、处理检校场数据计算各仪器间精密的偏心分量和安装轴间精密的偏心角,从而对整个测区数据进行系统误差纠正,提高精度。IMU的3个角Heading、Roll、Pitch(即航片角、侧滚角、俯视角)的检校,要求地形有一定的坡度,但不能太大,同时地形范围适当大些,保证航线足够长。一般选择有平地、山坡、房屋的地区为检校场。飞机在飞检校场时,一般飞“井”字形或“田”字形。
2.2 数据采集
在飞机起飞前30 min,打开地面基准站上GPS接收机,在飞到测区之前,打开POS系统,静止一段时间,接着按“8”字形飞,飞完之后直飞5min,以保证POS系统处于最佳工作状态,然后开始数据采集。在测区进行数据采集时,飞机可按设计航线自动飞行,扫描仪及相机、POS系统按设置的参数进行数据采集。数据采集完之后再依次直飞5 min、倒“8”字形飞、静止几分钟,关掉POS系统,地面GPS接收机待飞机关掉POS系统后30 min再关。
如果机场距离测区较远,就不用在采集测区数据前后飞倒“8”字形。总之,在采集数据之前,要保证POS系统处于良好的工作状态。
3 数据处理软件
在整个数据处理过程中要综合考虑现有多种软件的优缺点,采用不同软件进行不同阶段的数据处理。
加拿大Applanix公司的PO-SPac MMS软件不仅能进行系统误差检校、多种方法解算POS数据,还可以做影像白平衡、自动空中三角测量,也可以结合激光测距数据和POS数据求解出LAS格式点云,用该软件解算POS数据、LAS点云及影像的外方位元素;芬兰TerraSolid公司的TerraSol-id系列软件是目前世界上比较灵活和系统地处理激光雷达点云的软件,利用TerraScan和TerraModel-er模块可进行激光点云的处理以及DEM、DSM的提取,通过对不同高度的植被进行分类,还可以得到不同高度植被分布区;inpho公司的摄影测量系统Ap-plicationMaster是欧洲最著名的航空摄影测量与遥感处理软件,可全面系统地处理航测遥感、激光、雷达等数据,应用其中的OrthoMaster模块可进行全自动的严格差分正射处理,能够得到真正射像片;应用inpho摄影测量系统中的OrthoVista正射影像镶嵌软件可进行大范围影像的快速无缝镶嵌,同时进行不同像片间的匀色处理。其他应用到的软件还有SDFCOPY、RiANALYZE560等。
4 数据处理基本流程

图2 整个数据处理流程Fig.2 The whole data processing procedure
数据处理包括数据预处理、点云数据处理和正射影像制作3大部分,整个数据处理流程见图2所示。
4.1 数据预处理
数据预处理包括解算原始LAS点云数据和原始影像2部分,一般由硬件设备随带的软件进行处理,常见的有POSPac,AEROoffice,GrafNav,IPASPro等,这里以POSPac为例进行详细数据处理描述。
原始点云数据为SDF格式的波形数据,数据量很大,通过SDFCOPY软件从liDar存储器中导出;然后利用RiANALYZE560对SDF格式点云数据进行波形分析,依据测区最大和最小高程用高斯脉冲滤波法计算出以UTC时间为参考的高精度SDC格式数据,这种格式数据在解算出航迹文件后加地理参考和GPS与UTC时间差,经计算得到最终LAS格式点云。原始影像数据没有RGB信息,利用PO-SPac MMS软件将RGB信息添加到影像中,同时做白平衡,得到初始tif影像。
利用POSPac MMS 5.2软件解算POS数据,首先用地面基准站GPS接收机采集的数据与机载GPS接收机接收的数据进行载波相位差分处理,得到飞行平台精确的三维坐标,处理完一般利用该软件评估点位的精度,如图3所示,除此之外还可评估各点的质量等。将GPS数据与IMU姿态数据以卡尔曼滤波融合,得到最终精确的sbet.out航迹文件,该文件描述不同时刻激光扫描仪的空间位置以及姿态。结合航迹文件和SDC格式的激光测距数据,得到有地理参考的原始LAS点云数据。整个过程中涉及到IMU坐标系、激光扫描坐标系、载体坐标系、导航坐标系以及地心坐标系之间的转换,最终所有数据结果都归算到WGS84坐标系统下。

图3 点位精度评估Fig.3 The estimation of point position accuracy
相机的检校和点云数据的检校分别用不同软件进行处理。应用POSPacMMS 5.2软件创建影像金字塔和连接点,以此进行数码相机的检校,检校结果为相机的内方位元素以及像空间坐标系与载体坐标系3个坐标轴间的偏心角,再综合航迹文件和相片的曝光时间记录计算可得到精确的影像外方位元素(X,Y,Z,O,P,K)。
使用TerraSolid系列软件中的TerraMatch进行LAS点云数据的检校。在检校之前需要把sbet.out航迹文件加载到工程文件中,然后将航迹和点云对应起来,至此可以把地面点按不同航带分离出来,通过对重叠区的点进行计算得到精确的侧滚角、俯仰角和航偏角,重新解算LAS数据或直接应用到点云数据中,可大大消除系统误差,提高了点云数据的精度。
4.2 点云数据处理
采用TerraScan软件模块处理点云数据,采用TerraModeler软件模块提取DEM和DSM。利用TerraScan软件模块处理点云数据的一般流程如图4所示。

图4 LAS点云数据处理Fig.4 The LAS point cloud data processing
TerraScan中地面滤波采用的是瑞典Peter Ax-elsson提出的不规则三角网法,先选择种子点构建一个粗略的地面三角网,剩余的点为非地面点,然后逐渐从非地面点中选择满足一定条件的点向初始粗略三角网中添加构成新的网,迭代计算,直到所有的点分为地面点和非地面点为止。在地面滤波时要注意不同的地形选用不同的滤波参数,主要有地形坡度角、迭代角和迭代距离,需根据经验选择合适的参考值。自动滤波完成后有些点的分类是错的,要结合正射影像进行手动分类。一般情况下,尽量减少手动操作,以节省时间及成本。得到精确的地面点后即可提取DEM和等高线。根据需要不同,可生成不同采样间隔的三角网DEM或格网DEM,格式可以是.txt、.tif、.asc等,具体采用何种格式根据需要而定。如果点云数据量太大,在满足精度要求的前提下可将点云抽稀后再建DEM和等高线。LAS点云为WGS84坐标系统,而我国通常采用北京54坐标系或西安80坐标系,这就涉及到坐标转换的问题,一般平面坐标转换采用七参数进行转换,高程转换通过基准站2个不同坐标系下的坐标拟合得到高程异常,然后对所有点云数据加上高程异常即可。如果测区范围不大,也可以不进行高程转换。
4.3 正射影像制作
通过POSPac MMS可以得到精确的影像外方位元素,然后利用inpho摄影测量系统参考从点云数据提取的DEM进行正射纠正及正射影像的匀色及无缝镶嵌。
在用Application Master导入影像的外方位元素后,需逐步选择数码相机型号、输入主距和内方位元素、像素大小以及镜头畸变等。然后用OrhoMaster模块参考DEM采用三次卷积法进行正射纠正,用OrthoVista模块自动进行匀色处理及大范围正射影像的镶嵌。
与ERDAS的LPS模块相比,利用OrthoVista能够自动进行大面积的影像颜色平衡和自动羽化功能,使最后得到的正射像片是一副无缝且颜色平衡,并带坐标的完美的影像镶嵌图;而与TerraSolid系列软件中的TerraPhoto模块相比,能够处理大数据量、大面积的正射影像,用TerraPhoto制作的正射影像匀色效果也很好,但数据量太大就必须分块处理,加载整幅大范围大数据量正射影像时TerraPhoto模块自动从Microstation软件中卸载。
5 应用实例
湖北省长阳土家族自治县位于鄂西南山区,清江中下游,是湖北甲级风景区,省级生态环境度假区。因测区内高山林立,雾气大,采用传统测绘方法工作量大、工期长。结合liDar技术,对该区域进行地形数据采集和土地调查项目,采用的liDar系统为徕卡ALS50-Ⅱ。该设备适合200~6 000 m的高空作业,其扫描角为75度,最大扫描频率为150 kHz,搭载的CCD相机分辨率高达3 900万像素。图5所示为最终的测绘成果。将地籍图与liDar影像叠加后,测区内土地调查情况更加直观。通过内业比对,分别将权属调查和地籍碎部测量遗漏区域以记号标注;对地籍图与DOM套合不够精确的区域,也一一标示出来作为外业测图精度检查的重点区域。如图5所示,土地调查成果中疑似错漏区域被重点标出。进一步工作就是对照该检查结果进行排查纠错。此外,liDar采集生成的1 m间距等高线作为地形要素添加到地籍图中。实践经验表明,liDar辅助土地调查能显著提高工作效率,大大缩短了土地调查的周期。
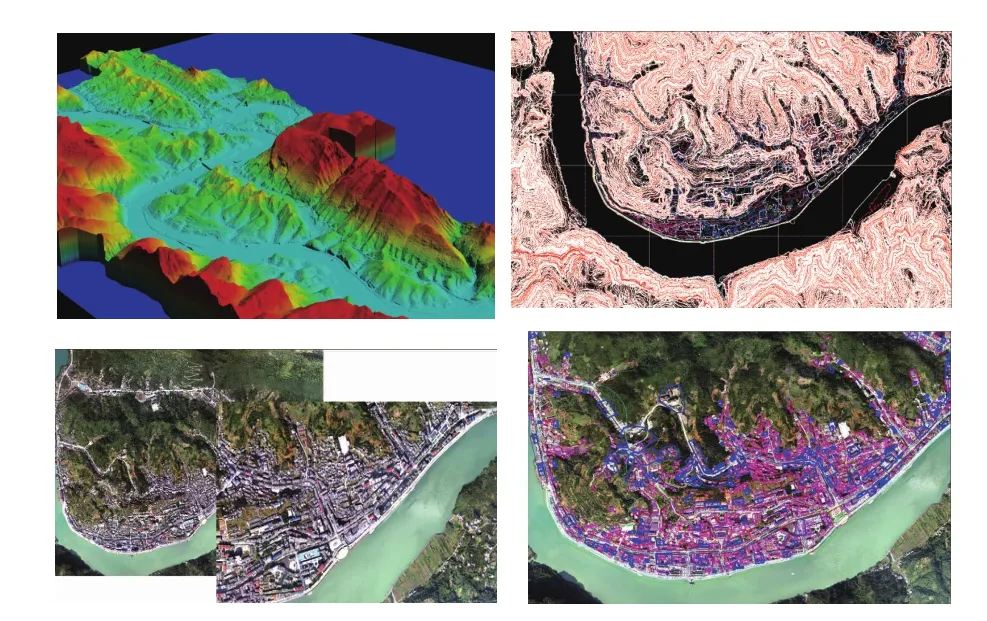
图5 基于liDar的测绘成果Fig.5 The survey achievement based on the liDar
6 结 语
本文主要介绍了机载激光雷达从数据采集到得到DEM和正射影像的全过程,包括数据采集前的准备(申请空域、设计航线、布设地面基准站、选择检校场)、数据采集、数据预处理、LAS点云数据处理和正射影像制作。并在国内首次将liDar技术应用于土地调查项目。其核心问题总结如下:
(1)布设GPS基站时根据数据采集完处理GPS数据的方法选择对应的设站方式,若采用一般方法,基站间距30~50 km就可以了;如采用Applanix的SmartBase进行处理,间距可以达到70 km,要求基站将测区包围,够成一个网状。为便于数据处理后快速检查已知点与所得点云数据的绝对精度,在测区范围内可布设1~2个基站。
(2)惯性导航中用的H(航片角)、R(侧滚角)、P(俯仰角)与摄影测量中的O(Omega)、P(Phi)、K(Kappa)是两组完全不同的概念,前者描述的是IMU坐标系与导航坐标系之间的关系,后者描述的是用户定义坐标系与像空间坐标系之间的关系,两者之间通过变换矩阵可相互转换。
(3)在航飞前或航飞后,要进行仪器检校的检校场飞行,没有进行系统误差检校的数据是不能用的。在用TerrraMatch进行点云数据的检校时,地面点的滤波要按航带进行处理。
(4)在将WGS84下的点云转换成北京54或西安80坐标系时在TerraScan中根据转换七参数定义转换模型,利用七参数转换的平面坐标精度高,在测区范围不大时不用转换高程,如果测区范围很大,就要进行高程拟合,转换高程。
[1] 徐祖舰,王滋政,阳 锋.机载激光雷达测量技术及工程应用实践[M].武汉:武汉大学出版社,2009.(XU Zu-jian,WANG Zi-zheng,YANG Feng.The Lidar Sur-veying of Aircraft and Engineering Using Activities[M].Wuhan:Wuhan University Press,2009.(in Chinese))
[2] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.(ZHANG Xiao-hong.The Theory and Methods of Airborne Laser Radar Surveying Technology[M].Wuhan:Wuhan University Press,2007.(in Chinese))[3] 刘 军,王冬红,张永生.GPS/IMU系统HPR与OPK角元素的剖析与转换[J].测绘科学,2006,(9):54-56.(LIU Jun,WANG Dong-hong,ZHANG Yong-sheng.The analysis and conversion between HRP and OPK diag-onal elements in the GPS/IMU system[J].Surveying and Mapping Science,2006,(9):54-56.(in Chinese))
[4] 李学友.IMU/DGPS辅助航空摄影测量原理、方法与实践[D].郑州:中国人民解放军信息工程大学,2005.
(LI Xue-you.The principle,approach and practice of IMU/DGPS-supported photogrammetry[D].Zheng- zhou:PLA Information Engineering University,2005.(in Chinese))
[5] PETER Axelsson.DEM generation from laser scanner data using adaptive TIN models[J].International Archives of Photogrammetry and Remote Sensing,2000,33:119- 126.
(编辑:周晓雁)
Airborne Lidar Data Gathering and Data Processing
ZHANG Yu1,DOU Yan-juan2,ZHANG Xiao-dong2
(1.Yangtze River Scientific Research Institute,Wuhan 430010,China;2.Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430079,China)
The paper mainly researches the whole data processing flow-chart from data acquisition to producing DEM and orthophoto,including preparing work before data acquisition,POS data processing,original images pro-cessing,systemic error calibration,LAS point cloud data processing,DEM extraction and orthophoto production.At the end,the paper analyzes the problemswhich should be paid attention to in every processing step.
airborne lidar;data acquisition;data processing;DEM;orthophoto
P231
A
1001-5485(2010)01-0013-04
2009-11-05
长江科学院科研基金项目(YJJ0804)
张 煜(1971-),男,湖北武汉人,工程师,博士,主要从事摄影测量与遥感技术研究,(电话)62775940(电子信箱)zhangyu_1999@hotmail.com。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2019年4期)2019-05-10 08:16:20
测绘通报(2018年10期)2018-11-02 10:07:28
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
遥感信息(2015年3期)2015-12-13 07:26:50
