基于汽车AFS大灯系统的轮速处理信号设计
2010-09-03 08:22:50卫修明
合肥工业大学学报(自然科学版) 2010年8期
卫修明
(芜湖罗比汽车照明系统有限公司,安徽芜湖 241000)
AFS自适应汽车前大灯系统(Adaptive Front-Lighting System,简称 AFS)作为一种新型的照明方式,已经在一些著名品牌的高端车型上应用。其基本原理是:当车辆转向时,安装在方向盘上的转角传感器输出转向动作信号,控制单元ECU根据方向盘转角位置和车速[1]等相关信号对车辆转向角度进行计算和判断,然后控制大灯动作机构,从而实现弯道照明。系统控制主要取决于方向盘传感器的转角位置和转向加速度信号,由于驾驶者操控方向盘动作的差异性,在快速转弯、连续弯道情形下,系统的迟滞性便显现出来。
提高AFS系统的实时性是本文研究的课题。由于汽车轮速传感器[2]输出的信号直接反映出车轮的转动状态,采用轮速信号特征控制的AFS自适应汽车前大灯系统具有较高的道路适应性和实时性。其基本原理是:采集汽车转向轮的轮速信号,将左、右转向轮轮速传感器的信号处理后送至控制单元,ECU根据左、右转向轮在转向时出现的二轮的频率差或信号脉宽的微小差别进行计算和区分;ECU判断出车辆的转向动作和转弯半径后输出控制信号,控制大灯照亮汽车行驶的方向和弯道。这些控制参数来源于轮速传感器及其双通道信号处理电路[3]和相关处理软件。
1 轮速信号采集与分析
1.1 磁电式轮速传感器原理
汽车在行驶过程中,传感器转子与传感头的磁极距离发生交替变化,因而在线圈中产生感应电动势[4]。检测感应电动势交流正弦波的波形可以计算出轮速的大小。感应线圈中感应电动势的计算公式为:

其中,ε为感应电动势;ω为旋转运动的相对角速度;N为线圈匝数;B为磁场强度;A为每匝线圈的截面积;φ为线圈平面法线方向与磁场方向间的夹角。
轮速信号频率的计算公式为:
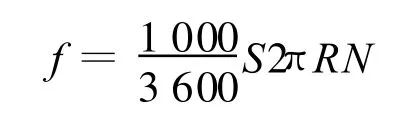
其中,f为轮速传感器输出频率;S为车速;2πR为车轮周长;N为齿数。
当车辆转弯时,转向轮轮速传感器输出的信号频率产生不一致,比较此时内、外转向轮2个信号的频率差以及信号周期的区别,可以计算出速度、转弯半径等车辆转向特征的近似值。
1.2 轮速传感器的信号采集
轮速传感器信号特征试验选用了国内保有量较大的某款商务车型,该车车轮转动半径为300 mm,齿圈齿数为44齿。试验分别在台架和行驶的车辆上对同一型号磁电式传感器的输出信号进行采集。信号采集台架如图1所示。轮速传感器总成件被固定在试验台架上,用无级调速电机驱动传感器总成使之达到测试的转速条件[5],在设定的转速下获得相应的轮速信号波形。
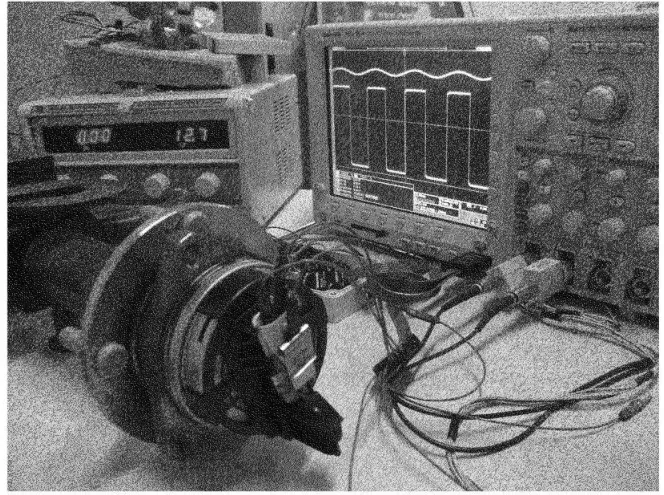
图1 试验台架上的传感器总成
采样仪器使用了泰克公司的MSO 4054示波器,该示波器可以对4个模拟通道和16个数字通道进行信号采集,仪器选配的AUTO模块可以对汽车总线信号进行解读。行驶中的轮速信号是在试验车辆动态过程中实时采集的,对这种实时采集信号的动态特征进行分析,有助于轮速信号处理电路的设计和转向信号的处理。
1.3 传感器的信号特性
试验观察的重点是车辆以3~5 km/h低速行驶时的轮速传感器信号特征,以及车辆转向速度和转向半径不同的条件下,左、右转向轮的轮速传感器输出信号的特征[6]。
试验以车速3~150 km/h为采样段,MSO 4054对轮速传感器的输出信号进行取样观察,当车速为3 km/h时,电磁感应式轮速传感器输出电压为60 mV,输出信号频率约为20 Hz。当车速为150 km/h时,电磁感应式轮速传感输出电压为1 800 mV,输出信号频率约为1 000 Hz。由此可以看出,当车速低时传感器的输出电压可能只有几十毫伏,频率可以为零。将5 km/h车速与150 km/h车速信号进行比较,两者之间的幅度差约为26~30 d B。
通过比对试验室环境下的试验台架和道路行驶中的车辆在相同速度条件下的信号质量,可以看到2个试验环境下的信号质量有显著的不同,如图2所示。
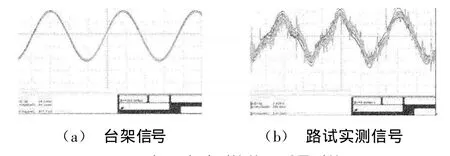
图2 相同车速时的信号质量对比
1.4 试验结果分析
磁电式轮速传感器产生的信号特征如下:①传感器输出的电压信号为周期性变化的正弦波信号,与理论公式基本一致[7];在传感器齿圈的齿数一定时,正弦波信号的频率与车轮转速一致。②输出的正弦波幅值与车轮的转速成正比。当车辆 U形转向时,轮速最低、输出幅度最小。③车辆行驶过程中由于各种电器设备[8]产生的高频干扰的影响,传感器输出的信号波形出现抖动、尖峰等,在车速低、输出的信号幅度较小时,这种干扰显得尤为严重。
2 轮速信号处理电路的设计
2.1 信号处理电路的设计要点
汽车ABS防抱死制动系统和本文描述的轮速信号控制AFS自适应汽车前大灯系统同样采集轮速传感器的输出信号,但是对轮速信号输出频率的采用段有所不同。ABS防抱死制动系统通常作用在时速30 km/h以上,此速度下轮速输出信号幅度大、频率高且信号质量较高。以轮速信号控制的AFS大灯系统在车辆转弯时的车速通常低于5 km/h,此时轮速输出信号幅度小、频率低且信号中叠加的干扰较大[9]。对低速、小信号时轮速信号处理的难度在于电路的动态特性、滤波特性以及延时特性。ABS系统和AFS系统对应的轮速信号处理电路看上去相似,设计却有很大的不同。
(1)由于车辆U形转弯时,轮速信号频率从刚初始转弯时的1 Hz左右逐渐增加到20 Hz,信号幅度在40~100 mV之间且信号的可用性相对较差。
(2)控制单元判断车辆运动时需将左、右轮速信号同时做比对处理,初始转弯时低频率的轮速信号的处理直接影响AFS大灯系统响应速度。因此,对处理电路的时延、相延有严格要求。
(3)由于轮速信号幅度变化的跨度很大,对信号处理电路的动态特性有较高的要求;考虑增加增益控制电路,前端设有增益控制接口。
(4)车辆转弯时ECU单元对左、右轮在转向时产生的轮速差进行计算,并判断车辆运动方向以及转向特征。由于要对2路差别原本不大的信号同时处理,分辨其不同并加以判断,因此电路必须具有较高的对称性。
2.2 信号处理电路示意图
分析左、右轮速传感器转向时的信号差别,不仅频率、幅度不同,而且在低速转弯时2个信号的相位差以及正弦信号转换为方波后的脉宽也不同,而车辆转向的特征就包含在这些轮速信号中。信号处理的过程中如果丢失了信号的细微差别,也就丢失了车辆转向的信息。因此,信号处理电路设计时必须保持信号的真实性。当轮速信号中包含车辆转向特征的频率和脉宽信号进入ECU单元,经ECU控制软件的处理判断之后驱动大灯转动机构。
图3所示的轮速信号处理电路设计具有左、右2个信号处理通道和通道平衡控制,实现了信号的增幅、限幅、滤波和整形电路以及动态特性,设计同时对电路的对称性进行控制。这些对称性控制也体现在PCB设计时的布局、布线、供电、接地以及端口的阻抗匹配。
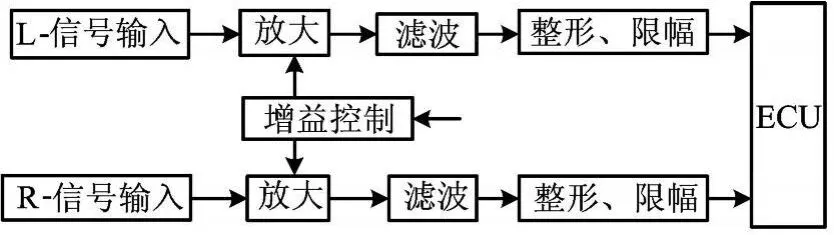
图3 轮速信号处理电路示意图
2.3 信号处理电路设计
根据轮速传感器试验结果:当车速为3 km/h时,轮速传感器输出信号幅度为60 mV,当车速为150 km/h时,轮速传感器输出信号幅度可以达到2 000 mV。为保证信号处理的各级放大器能够正常工作,并使得处理后的信号符合电控单元ECU接口电平的要求,需要先对轮速信号各级放大器进行自动增益控制处理,将轮速传感器输出小信号时的增益调大至40 d B,大信号时增益调小约10 dB,以保证轮速传感器输出信号幅度满足后端限幅电路的要求。所设计的信号处理基本电路原理如图4所示。
电控单元ECU在计算车速的同时判断放大器的增益是否达到预设值,并给出增益控制信号的AGC接口。
2.4 滤波电路设计
从分析信号波形的频率成分可见,叠加在正弦波上的尖峰、畸变等干扰多为高频分量。设计低通滤波器可以对1 200 Hz以上高频成分达到40 dB以上的衰减。为了滤除轮速信号中的干扰信号,同时对轮速传感器输出的20 Hz以下转弯信号进行有效识别,设计一个三阶有源滤波器。电路对信号进行滤波处理,使高频信号能够迅速衰减,滤除干扰信号,从而得到较为理想的轮速信号。
2.5 波形转换电路设计
经放大和滤波处理后的轮速信号仍然有幅度不一致的现象出现,需要在把信号转换为同频率的方波信号的同时,对脉冲的前、后沿做整形处理。AFS的随弯转向特性对轮速传感器输出信号的脉宽有较高的要求,为了区别车辆低速转弯时左、右转向轮速传感器信号的微小相位差以及信号脉宽的毫秒级差别,电路处理过程对信号的还原性要求很高,U301-A电路参数的合理设置在滤波和限幅之间起到了信号匹配和中点平衡的作用。图4中,运放电路将方波的前、后沿进一步陡峭,通过电路参数的计算可以实现此功能。末级的 Q301滤除尖峰的同时将方波的幅度归为一致。

图4 信号处理电路原理图
3 设计验证
3.1 轮速传感器信号处理电路模拟仿真
在OrCAD/Pspice仿真环境下对电路的性能进行仿真研究[5],在正弦波信号源为 50 mV、80 Hz和1 800 mV、1 000 Hz的情况下,设计低通滤波器3 dB频率截止点为900 Hz。滤波器对1 200 Hz以上的干扰信号可以达到40 d B以上的衰减。信号处理电路的滤波特性、延时特性,分别如图5和图6所示。
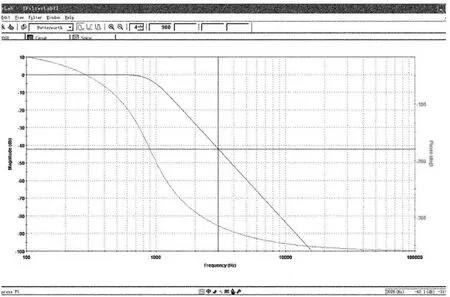
图5 低通滤波器频率特性

图6 低通滤波器延时特性
3.2 测试分析
对电路进行了实测验证,无论车辆是在转弯时输出弱信号的情况下,还是在高速时输出大信号的情况下,电路的动态范围和增益控制能力均可以将正弦波转换成同频率等幅度的方波。信号处理电路的滤波特性,如图7所示。
由图7可见,信号处理过程对杂散干扰起到了有效抑制。试验中,对2个通道波形的幅度和相位、双路轮速信号处理电路的一致性和对称性做了比对,电路满足了AFS大灯系统对轮速差信号的严格要求,符合单片机接口电平和前、后沿时差要求,可用于车辆转向轨迹的精确计算。
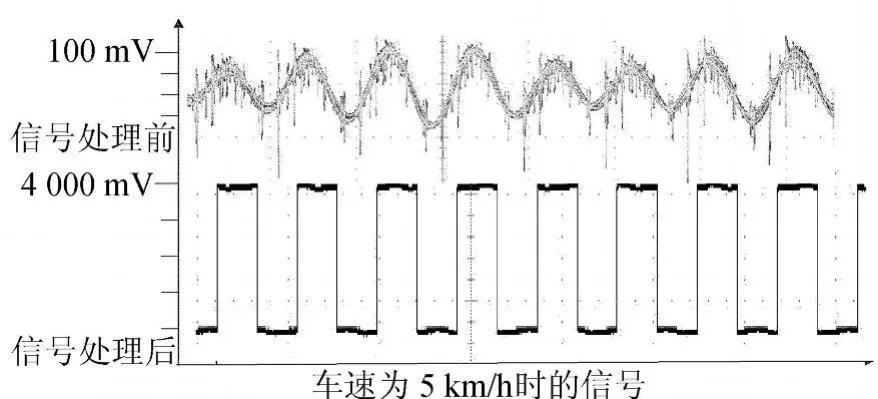
图7 信号处理电路的滤波特性
4 结束语
采集左、右转向轮的轮速信号并将采集的包含干扰和有用信息的轮速信号,经过信号处理电路放大、滤波、限幅整形和增益控制后,送至ECU计算并处理。考虑到轮速信号应用场合的不同,信号处理电路的要求也不一样。
本文采用轮速信号特征控制的AFS自适应汽车前大灯系统,利用了轮速信号中包含的车辆转向运动特性的信息,将车辆转向时左、右轮速信号的频率、相位和脉冲宽度等细微差别,经轮速信号处理电路处理后送至ECU单元进行计算、区分和判断,同时驱动汽车大灯照亮车辆行驶的弯道。为保证电路对左、右2路轮速信号频率、脉宽信号处理时还原轮速传感器转向时信号的真实性,信号处理电路是关键。设计一个动态范围大、对称性强、滤波特性好、稳定可靠的高性能双通道轮速信号处理电路,可以减少车辆转向信息的畸变和缺失。
经过仿真、试验和系统实际装车路试,结果表明,所设计的电路实现了以轮速信号作用于AFS自适应汽车前大灯系统控制,试验车辆无论U型弯、S型弯及连续高速急弯,采用轮速信号控制的AFS自适应汽车前大灯都可以做到实时、适路、快速地随弯照明。
[1] 周志立,徐 斌,卫 尧.汽车ABS原理与结构[M].北京:机械工业出版社,2005:26.
[2] 麻友良.汽车电器与电子控制系统[M].北京:机械工业出版社,2009:86.
[3] 赵继文,何玉彬.传感器与应用电路设计[M].北京:科学出版社,2002:8-15.
[4] 李 艳,李新娥,裴东兴.应变式压力传感器及其应用电路设计[J].计量与测试技术,2007,34(12):32-36.
[5] 汪知望,方锡邦,陈 燕.汽车ABS轮速传感器及其信号处理 [J].汽车科技,2006,7(4):28-32.
[6] 李红岩,侯媛彬,王 秀.基于微处理器的ABS轮速信号采集处理系统的实现[J].计算机测量与控制,2006,(1):131-133.
[7] 蔡 艳,黄智宇.基于NCV1124的ABS轮速信号采集处理[J].重庆工学院学报:自然科学版,2009,23(8):6-9.
[8] 齐志鹏.汽车传感器和执行器的原理与检修[M].北京:人民邮电出版社,2002:187-294.
[9] 秦玉伟,金铁峰,李芳菊.磁阻式轮速传感器在ABS中的应用 [J].仪表技术,2009,(9):75-76.
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17 07:42:50
汽车实用技术(2022年10期)2022-06-09 11:33:44
汽车实用技术(2020年24期)2021-01-05 08:22:04
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
汽车维护与修理(2018年1期)2018-04-04 01:13:22
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33