基于超声波的雷场节点分区域识别定位方法
2010-08-21 12:33:22邓光明张海良焦国太龚玉帅
探测与控制学报 2010年3期
邓光明,张海良,焦国太,龚玉帅
(1.中北大学机电工程学院,山西太原 030051;2.山西北方惠丰机电有限公司,山西长治 046012)
0 引言
随着科学技术的进步,地雷正向着智能化、多用途方向发展,技术含量越来越高,障碍宽度越来越大,出现了智能地雷、组网雷阵等。它们不仅可以攻击坦克,还可以打击超低空飞行的直升机和巡航导弹,也可以用来封锁敌方机场上起降的飞机[1]。但雷场会因敌方排雷、扫雷、攻击目标有效爆炸或其他可能出现的异常情况而使雷场中某些地雷受到破坏,造成雷场中出现缺口,这样必然会影响雷阵对目标的探测、定位和区域封锁效果,应采取相关措施对缺口进行侦测和修复。而雷场变化应急最直接、最快的办法是对雷场节点周围的相邻节点的掌控与定位,一旦节点消失,周围的邻节点能快速感知,并采取措施去填补或修复,这就要求其邻雷定位方法能适应雷场快速反应,能在雷场节点相对静止的状况下,侦测邻雷位置;同时要求定位装置体积较小、结构简单、功耗较低。目前的雷场定位技术研究主要集中在使用声、毫米波等对目标的探测与定位上[1],而对雷场节点定位研究仅处在初步阶段,主要倾向于通过自组织方式构建无线传感器网络,建立网络同步,发现网络拓扑,进行网络节点定位[2],但专门针对邻雷的雷场节点定位未见相关报道。本文针对此问题,提出了一种基于超声波的雷场节点分区域识别定位方法。
1 分区域识别方法
分区域识别方法又叫多象限分区域识别方法,目前该方法已经广泛应用于各种探测与目标识别任务中,防空导弹就是利用光学或无线电等发射天线进行分象限探测,通过对目标的光电特性识别进行探测与定位的[3-4]。但将该方法与声学相结合进行目标探测与定位尚未见报道。
当前研究较多的声学定向方法主要有时延差定向法、时延估计法、声强向量法,以及对时延估计法和声强向量法进行联合使用[5]等,并已在实际系统中得到应用。而本方法将分区域识别方法引入到声学定位中,通过多传声器之间在探测器的圆周上的均匀排布,形成传声器阵列,人为地将圆周分成多个区域,如图1所示。当目标位于探测距离之外时,探测器处于截止状态;一旦目标进入探测区域,传声器阵列就立即作出反应,然后信号处理系统可以根据阵列的反应情况和采集到的信号,采取相关的算法进行目标的位置判断。
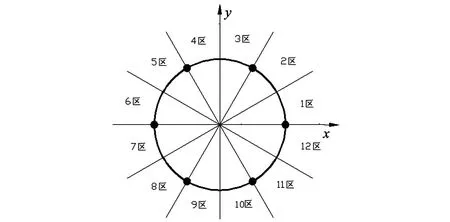
图1 目标方位信息判断图Fig.1 Target bearing information judgment chart
2 基于超声波的雷场节点分区域识别定位原理
2.1 节点定位原理
本节点定位方法运用分区域识别方法对节点进行定向,即在一个节点上安装多个超声波发射装置,使超声波在同一时刻向周围360°发射,在另一个节点上按一定角度均匀安装若干个超声波接收装置,由于雷场节点体积小,节点间测距距离远,节点上的相邻超声波接收头接收到超声波信号的时间差很小,可以忽略不计,可以认为在同一节点上的超声波接收头在各自响应区域内能同时接收到超声信号。超声波传感器有一定的指向性,其接收区域角为60°,当相邻超声波接收头之间角度小于60°时,两者的接收区域将产生信号接收重叠区域,即在此区域内两接收头将同时发生响应。当多个超声波接收头(大于6个)均匀分布于雷场节点上时,超声波接收头越多,相邻接收头之间角度越小,在单个超声波接收的60°区域内形成的不同的重叠响应区域越多,即可区分的识别区域也越多,因此可以根据在同一时刻不同的重叠响应区域对应的超声波接收头的响应情况来确定声源所在方向,即可以通过对该区域内发生响应的超声波接收头进行识别来判断超声波发射节点所在的方向。采用这种方法可以将超声波接收区域识别范围大幅减小,提高节点定位精度。
以10个接收头为例,如图2所示,图中将单个超声接收区域划分成了3个可识别区,对每个超声接收头按顺序进行编号,当A区有超声波信号时,2、3号超声波接收头接收到信号;在B区有超声波信号,仅3号超声波接收头接收到信号,而在C区有超声波信号时,3、4号超声波头将接收到信号。而整个节点接收区域被分成了20个可识别区,并且每个不同的区都对应着不同的超声波接收头响应,所以,当有超声波信号到达时,控制器可以对各个区域内发生响应的超声波接收头进行识别来判断声源所在区域即超声波发射节点所在的方向。
为了能探知节点的具体位置,需进行节点间测距,本节点定位方法采用声学和无线传输相结合的渡越时间测距方法,利用无线传输确定时间基准,通过超声波传感器测量节点之间的距离,如图3所示。首先由节点A向节点B发送无线通讯信号,同时发送若干个周期的超声波信号;节点B接收到无线通讯信号以后,开始计时,当接收到超声波信号后停止计时。由于无线通讯信号传播速度为每秒30万公里,通讯延时可以忽略不计,节点B的计时数值即可视为超声波从节点A到节点B的传播时间,进而根据超声波的传输速度即可求出两节点的距离[6]。
通过定向和测距相结合,就可以得出邻雷节点所在的位置。

图2 超声波阵列的分区域识别图Fig.2 Sub-regional recognition chart of ultrasonic array

图3 超声波测距原理图Fig.3 Schematic diagram of the ultrasonic ranging
2.2 节点定位协调分析
在雷阵中,各雷场节点的发射时间必须有着良好的协调与控制,以避免雷场内超声信号混乱,节点同时收到几个邻雷节点的信号等情况。本方法采用的是应答信号机制的方法,通过主节点去控制周围邻节点进行定位,假设主节点为A,邻节点为B,其工作流程如下:
第一步:节点A通过无线发送一个标志信号,若节点B接收到信号,立即返回一个应答信号,同时启动超声波发射;
第二步:节点A接收到无线回复应答信号,便立即启动定时和超声波接收。等待一段时间后,接收到超声信号,则停止计时,同时采用定位原理对B节点定位计算。若没接收到超声信号,返回步骤第一步,连续三次没有接收到超声信号,则表明节点B没在节点A掌控范围内,属于非邻节点,停止对节点B的定位,转向第三步;
第三步:采用定位节点B的方法,继续对主节点周围其余邻节点进行定位,直到知道节点周围所有的邻节点的位置和方位。
通过这种方式可以避免多个邻节点同时发射的情况,增加了定位的鲁棒性。
3 节点上超声波传感器的排布
考虑到本定位装置是雷场目标探测装置的辅助和配合装置,要求其节点定位装置体积小,成本较低,所以对于超声波接收头数目的选取,应在满足邻雷定位精度的情况下,尽量减少超声波接收头的数目。根据节点定位原理,对雷场节点接收装置的超声波接收头排布问题进行了综合分析,如表1所示。

表1 超声波接收区域分布表Tab.1 Region distribution of ultrasonic reception
由表1可以看出,只有当超声波接收头数n满足式(1)时,所划分的区域数为2n,且区域角度θ均匀,易于进行区域识别,超声波接收头的安装也容易实现。

当前的雷场节点布设一般是采取自动布设,通过自动布设完成后,节点间的相对位置比较分散,出现雷与雷的位置相对集中的机率比较小,所以对节点周围的邻雷的掌控可以在定位精度相对较低的情况下进行。按理论,识别区域越小,定位精度越高,但超声波方向性比较差,且受外界环境的影响比较大,特别是风和温度的影响,为了能在所划分的区域内比较准确地识别区分出来自不同方向的超声波信号,那么所形成的识别区域不能太小,应尽量保持区域角度θ≥20°,综合式(1)和式(2)可得:

所以,本雷场节点定位方法最多能对18个区域进行识别区分,并且9个超声波接收头的排布方式也是唯一适合邻雷定位排布,其最大定位误差为±10°。
节点上的超声波发射头的排布相对比较简单,只需让发射的超声波信号能覆盖达到360°范围即可。由于超声波发射头的发射方向角一般在60°左右,为了确保无盲区发射,采用8个超声波发射头,每个发射头之间间隔45°就能达到覆盖要求。
4 实验及结果分析
根据以上定位方法,搭建了雷场节点原理样机进行实验,该样机安装9个超声波接收头和8个超声波发射头,实验场所选在半径大于25 m的开阔的场地。
4.1 超声波分区域识别定向实验
将两节点放置于同一水平面上,距离地面20 cm高度,保持接收节点静止,将发射节点放置在以接收节点为圆心的场地内随机移动进行定向测试,布置图如图4所示,定向实验结果统计如表2所示。

图4 超声波测距原理图Fig.4 Schematic diagram of the ultrasonic ranging

表2 超声波定向实验数据Tab.2 Empirical datum of ultrasonic orientation
由表2数据统计结果可以看出:在10~20 m范围内,误差范围基本可以在10°以内;但在小于10 m时,10°以上达到了15%,而在大于20 m时,10°以上达到了27%。可以得出,本方法在近处和远处存在一些问题,定位误差比较大,故本定位方法比较适合在10~20 m范围内的邻雷定位。其中,在近处,误差主要由地面超声波反射干扰等原因引起;在远处,误差主要是由超声波接收区域逐渐增大,加上实验场地环境的影响,无法比较准确识别引起的;另外,所采用的传感器元件之间存在着一定的品质差异,对微弱超声波信号的响应不同,对系统误差存在着一定的影响。
4.2 超声波测距实验
该实验将两节点放置于同一水平面上,距离地面同一高度(20 cm),通过试验,得出最终测量实验数据如表3所示。

表3 超声波测距实验数据Tab.3 Experimental datum of ultrasonic ranging
表3数据均为加入温度和数据补偿后,并对多组实验数据取平均的结果,且采用的是声波的被动检测,产生误差均与实际符合,均在误差允许范围内。由于超声波发射器、接收器的放大电路部分以及无线信号收发过程都有一定程度的延时,这会对整个系统的测距精度有一定的影响。
5 结论
本文提出了一种独立于外界设备,基于超声波的雷场节点分区域识别定位方法,该方法采用多个超声波传感器在节点上按照一定规律的排布,通过分区域识别判断声源所在方位,同时利用声学和无线传输相结合的渡越时间测距法进行定位辅助,对雷场节点周围的邻雷进行定位。由于本次实验不算充分,且实验表明了该方法的适用范围存在一定的局限,还需进一步研究和改进。
[1]严金海.声、毫米波复合寻的系统目标识别与定位技术研究[D].南京:南京理工大学,2006.
[2]高昆,赵晓辉.智能雷场的无线传感器网络技术研究[J].无线电工程,2008,38(4):15-17.GAO Kun,ZHAO Xiaohui.The research of wireless sensor network for smart minefield[J].Radio Engineering,2008,38(4):15-17.
[3]曹现银,万少松,魏小金.某定向探测引信天线分析与设计[J].测试技术学报,2002,16:853-856.CAO Xianyin,WAN Shaosong,WEI Xiaojin.A design of the directional exploring fuse antenna[J].Journal of Test and Measurement Technolgy,2002,16:853-856.
[4]韩俊杰,李为民,张琳.无线电引信定向探测优化研究[J].现代防御技术,2006,34(1):69-72.HAN Junjie,LI Weimin,ZHANG Lin.Research on optimization of radio fuse orientated detection[J].Modern Defence Technology,2006,34(1):69-72.
[5]石杰,相敬林,罗建,等.声强向量法与时延估计法共用同一基阵实现舰船体积目标定向[J].兵工学报,2007,28(5):551-556.SHI Jie,XIANG Jinglin,LUO Jian,et al.Sound intensity vector estimation and time delay estimation combined to determine the bearings of ship volume target[J].Acta Aamamentarll,2007,28(5):551-556.
[6]张楠,焦国太,张瑞刚,等.智能封锁雷定位问题研究[J].弹箭与制导学报,2008,28(1):135-137.ZHANG Nan,JIAO Guotai,ZHANG Ruigang,et al.Study on localization of intelligent blockade land mines[J].Journal of Projectiles,Rockets,Missiles and Guidance,2008,28(1):135-137.
猜你喜欢
科学(2020年3期)2020-01-06 04:02:51
当代贵州(2019年2期)2019-06-06 08:37:20
电子制作(2018年17期)2018-09-28 01:56:38
电子制作(2017年7期)2017-06-05 09:36:13
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
探测与控制学报(2011年6期)2011-08-21 12:33:48