高斯型功率谱随机噪声斜视合成孔径雷达距离-多普勒成像算法
2010-08-21 12:33:18高许岗苏卫民
探测与控制学报 2010年3期
高许岗,苏卫民,顾 红
(南京理工大学电子工程与光电技术学院,江苏南京 210094)
0 引言
合成孔径雷达(SAR)是一种高分辨率雷达体制,它借助于脉冲压缩技术实现距离维的高分辨,借助于方位多普勒分析技术实现方位维的高分辨,且不受天气和时间的限制,能够全天时、全气候工作,已广泛应用于军事及民用领域当中。近年来,随机噪声SAR受到国内外广泛关注[1]。该体制雷达结合了成像技术和随机噪声雷达技术,具有十分优良的低截获特性、抗干扰特性、电磁兼容性和无模糊测距、测速性能等。在密集的干扰环境下,随机噪声SAR展示了更好的抗有源干扰能力,相对于线性调频波形(LFM)有5~10 d B的改善[2-3]。目前脉冲体制的随机噪声SAR在地雷探测、目标和地形成像、树叶穿透、目标跟踪等领域上得到迅速的发展。乌克兰国家科学院的Lukin和美国内布拉斯加州-林肯大学的Narayanan等人都对随机噪声SAR进行了理论研究和样机试验,获得了一些实验结果[3-7]。国内也对随机噪声SAR的理论进行了研究[2,8]。
但对斜视情况下的随机噪声SAR,目前的成像算法[9]不再适用,且目前有关随机噪声SAR的文献未给出斜视情况下的成像算法,为此本文提出了高斯型功率谱随机噪声斜视SAR距离-多普勒(RD)成像算法。
1 随机噪声信号
1.1 噪声调频信号
噪声调频信号为:

设u(t)为高斯白噪声,概率分布为:

功率谱为:

式中,σ为调制噪声的方差,ΔF为调制噪声的带宽。令mfe=KFMσ/ΔF为有效调频指数。由文献[10]可知,当m fe≫1时,噪声调频信号的功率谱密度与调制噪声的概率密度有线性关系。当调制噪声的概率密度为高斯分布时,噪声调频信号的功率谱密度也为高斯分布。
1.2 距离分辨率
随机噪声信号的功率谱密度为高斯型时,即

式中,B为随机噪声信号的带宽。由维纳-辛钦定理知
利用泰勒级数展开,计算自相关函数的包络归一化后的-3 dB主瓣宽度,可得距离分辨率为:

式中,c为电磁波传播速度。而LFM SAR的距离分辨率为:

由式(6)和式(7)可知,功率谱为高斯型的随机噪声SAR比LFM SAR有更好的距离向分辨能力。因此本文利用的信号是由噪声调频信号产生的功率谱为高斯型的随机噪声信号。
2 高斯型功率谱随机噪声斜视SAR RD算法
设雷达发射的随机噪声信号的基带形式为p(t)=exp[j2πθ(t)]。为了后面公式推导的方便,这里只考虑雷达波束照射区域存在一个点目标。则点目标的回波信号为

这里考虑SAR工作于斜视状态,雷达与目标之间的位置关系如图1所示。

图1 雷达平台与点目标的几何位置关系Fig.1 The geometry relation between radar and target
V为雷达平台的速度,θ0为斜视角,θ′为对目标的瞬时视角,点目标P的最近距离为R B。设以雷达平台位于A点时的时刻作为慢时间的起点,这时波束射线与通过P点而与航线的平行线相交与B点,经过t′m后,雷达平台移动到C点,设点目标P与B点的横距为Xn,则斜距为


式中 ,f dc=2V sin θ0/λ,f dr=-2V2cos2θ0/(λR0)。对式(8)中的t作傅里叶变换得


距离向参考函数为

将式(10)与式(11)相乘可得
对式(12)中的tm作傅里叶变换,由驻定相位原理得
其推导过程中利用了1/(1+f r/f 0)=1-f r/f 0+。对式(13)进行二维去耦的参考函数为:

将式(13)与式(14)相乘后,对距离向作逆傅里叶变换可得
式中,CCF(2R0/c-2R c/c)=IFFT{P(f r)P*(f r)◦exp[-j4πf r(R0-R c)/c]}。
最后对式(15)进行方位压缩处理,方位向参考函数为

将式(15)与式(16)相乘,并进行方位向逆傅里叶变换可得

式中,B a为方位向多普勒带宽。整个算法流程框图如图2所示。
由上面的推导可知,斜视情况下的随机噪声SAR与LFM SAR频域校正距离徙动和弯曲的距离-多普勒算法的处理过程类同,但处理中的参考函数完全不同,且前者信号为随机性信号,需先对距离向FFT获得确定的距离频谱,接着利用距离参考函数进行一部分距离处理,而不是LFM SAR先进行方位处理。对比图2和图3也可获得上述结论。因此,利用LFM SAR的成像算法不适用对斜视随机噪声SAR进行成像。
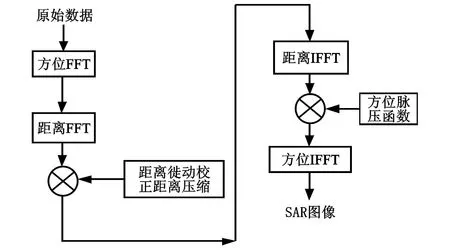
图2 LFM SAR频域校正距离徙动和弯曲的距离-多普勒算法流程Fig.2 The block diagram of LFMSAR RD with range migration correction in frequency domain

图3 高斯型功率谱随机噪声斜视SAR的距离-多普勒算法流程Fig.3 The block diagram of random noise on the gaussian shaped power spectra SAR RD
3 仿真分析
为了验证本文算法的正确性,进行了点目标仿真实验。仿真中采用的机载 SAR的参数为载频f 0=3 GHz,载机飞行速度v=100 m/s,雷达平台的高度H=1 000 m,雷达平台与测绘带中心斜距R0=3 000 m,随机噪声信号带宽B=150 MHz,信号脉宽为10μs,斜视角为5°,天线实际尺寸为1 m,三个点目标的垂直斜距分别为R =[3 010,3 000,2 990]m,方位向位置坐标为 X=[10,0,-10]m 。仿真结果如图4、图5和图6所示。图4为原始回波信号;图5为利用本文算法经过距离徙动校正后的图像,由此图可以看出同一个目标处于同一距离门,即提出的算法可以有效地校正距离徙动;图6为经过方位压缩处理后的最终图像,在目标峰值附近目标的距离向与方位向相比没有LFM SAR那样的sinc型,而方位向有较高的旁瓣,因为方位向信号可近似为LFM信号。由图6(b)可以清楚地看到随机噪声SAR的距离向峰值旁瓣比在-20d B,而由图6(c)可知方位向近似为LFM 信号,其峰值旁瓣为-13 dB左右。同时从图6(a)可知本文的算法对小斜视随机噪声SAR能获取较好的图像。

图4 原始回波Fig.4 Original signal
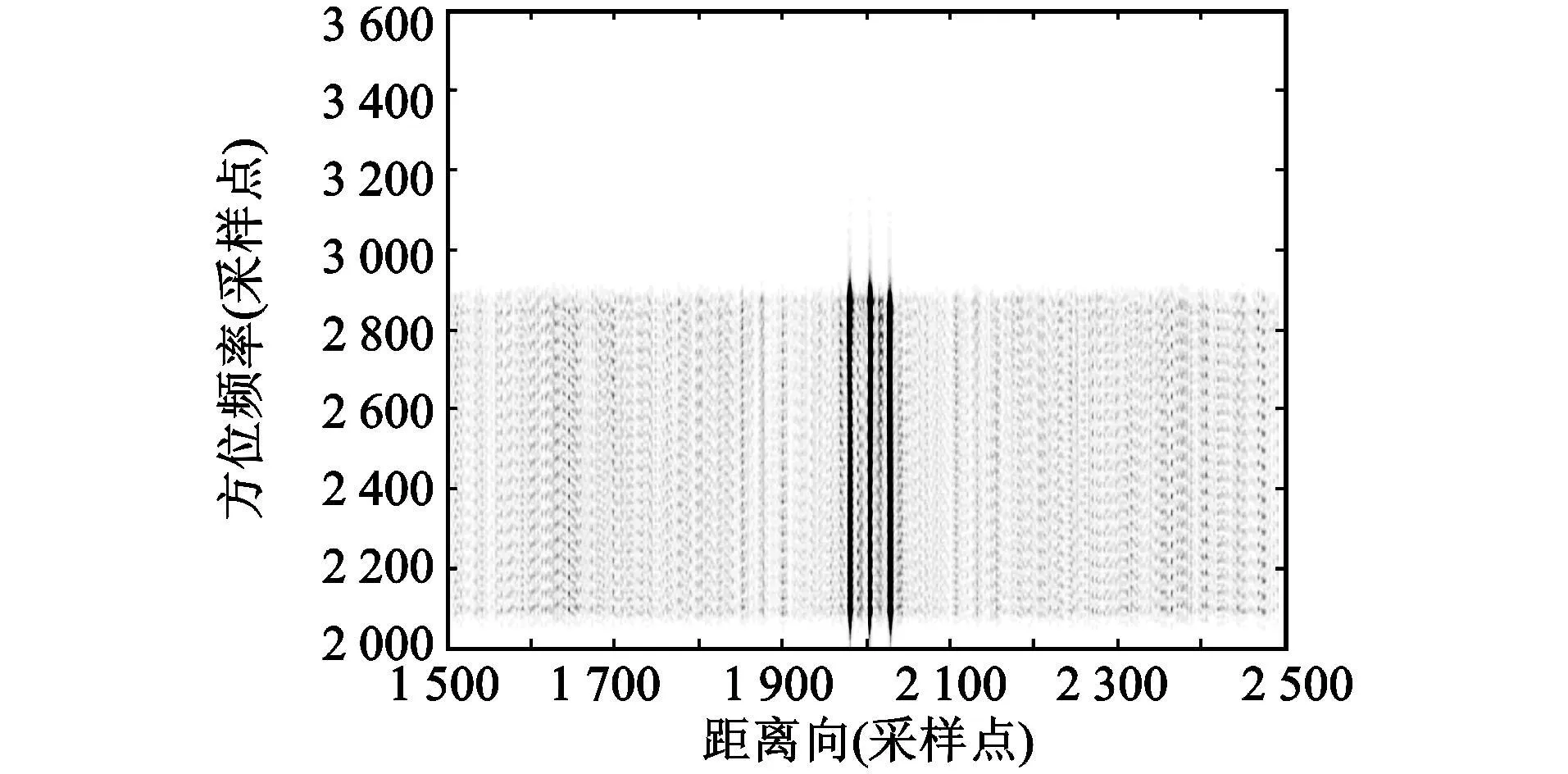
图5 距离向压缩处理后的图像Fig.5 Image after range compression
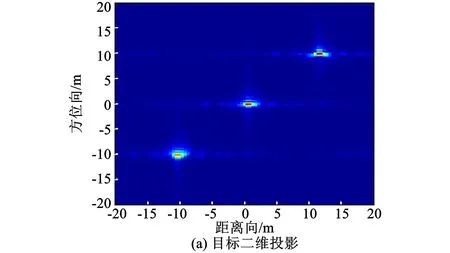
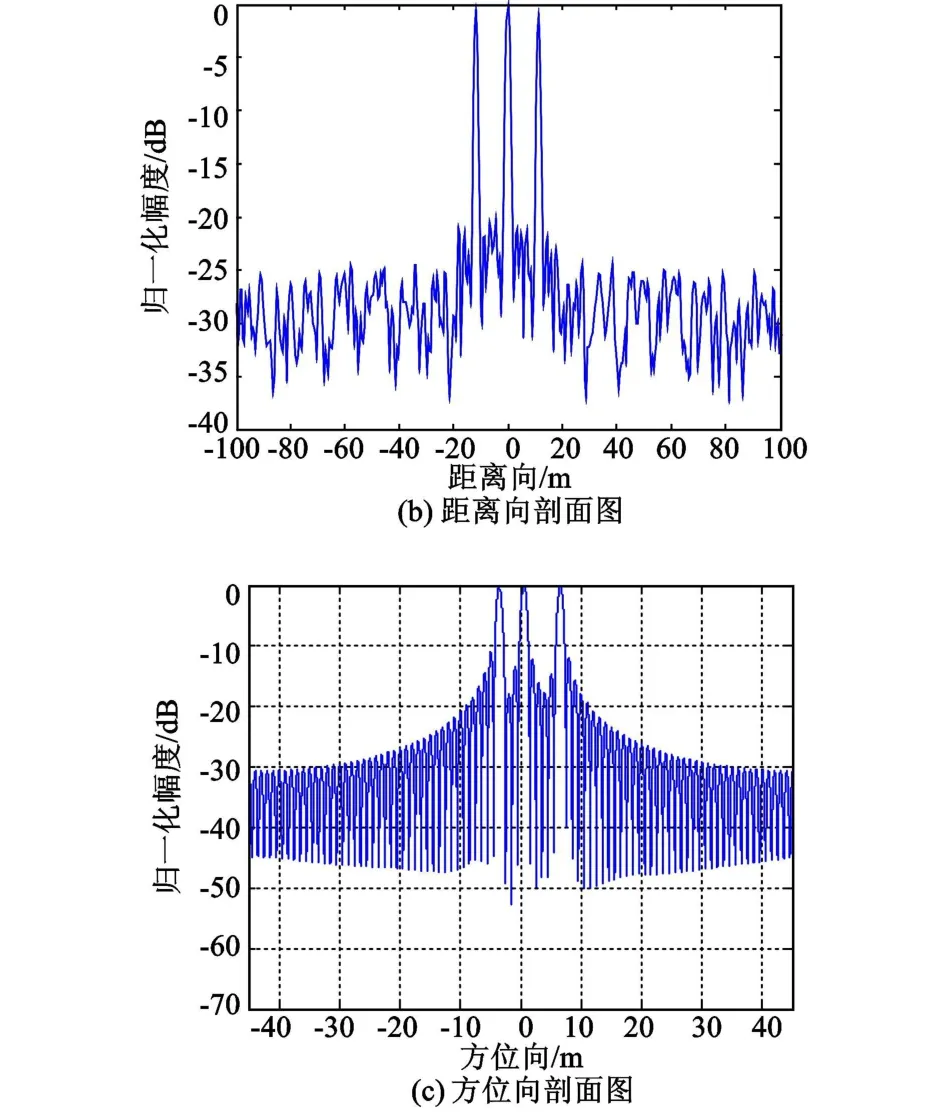
图6 随机噪声SAR Fig.6 Random noise SAR
4 结论
本文提出了高斯型功率谱随机噪声斜视SAR距离-多普勒(RD)成像算法。该算法依据随机噪声SAR的信号特点,推导出了在频域校正距离徙动和距离弯曲的随机噪声斜视SAR距离多普勒成像算法。仿真结果显示本文算法对小斜视随机噪声SAR能获取较好的图像,同时也验证了其有效性和可行性。
[1]马俊霞,蔡英武,张海.合成孔径雷达全景干扰与局部干扰效果评估[J].探测与控制学报,2005,27(3):38-40.MA Junxia,CAI Yingwu,ZHANG Hai.Evaluation study of extended and localized jamming effect on SAR[J].Journal of Detection&Control,2005,27(3):38-40.
[2]Zhang Xianyi,Su Weimin,Gu Hong.Anti-jamming Performance Analysis for Random Noise UWB Imaging Radar[C]//Proceedings of IEEE International Conference on Radar.Shanghai:IEEE Press,2006:309-312.
[3]Gramatyuk D S,Narayanan R M.ECCM Capabilities of an Ultra-wideband Band-limited Random Noise Imaging Radar[J].IEEETransactions on Aerospaceand Electronic Systems,2002,38(4):1 243-1 255.
[4]Lukin K A,Mogyla A A,Palamarchuk,et al.Ka-Band Bistatic Ground Based Noise Waveform SAR for Short Range Applications[J].In IET Radar,2008(2):233-243.[5]Kulpa K.Space Noise Synthetic Aperture Radar[J].Proc of SPIE,2006(61591I):1-6.
[6]Mogila A A,Lukin K A,Kovalenko N P,et al.Ka-Band Noise SAR Simulation[C]//the Fourth International Kharkov Symposium Physics and Engineering of Millimeter and Sub-Millimeter Waves.Ukraine:IEEE press,2001,:441-443.
[7]Lukin K A,Nesti G,Mogila A A,et al.Ka-Band Bistatic Ground Based Noise Waveform SAR[C]//International Radar Symposium.Wroclaw:IEEE press,2008:1-4.
[8]张先义.随机噪声超宽带成像雷达关键技术研究[D].南京:南京理工大学,2008.
[9]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005.
[10]赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
中国卫生标准管理(2015年8期)2016-01-15 03:58:44
电子器件(2015年5期)2015-12-29 08:43:38
中国当代医药(2015年29期)2015-03-01 02:07:48
雷达学报(2014年4期)2014-04-23 07:43:09
机械与电子(2014年2期)2014-02-28 02:07:47
电子设计工程(2014年8期)2014-02-27 11:57:22