直流无刷电机的建模与仿真*
2010-08-11 05:26陈欢
舰船电子工程 2010年2期
陈 欢
(无锡科技职业学院 无锡 214028)
1 引言
在油价高涨和温室气体排放问题日益严峻的今天,人们越来越重视车辆的油耗与排放问题。集成一体化起动/发电机(Integrated Starter Generator)系统作为轻度混合动力家族中的一员,越来越受到国内外诸多汽车厂商的青睐。在该系统中,用电机取代了传统发动机的飞轮,并且该电机可以完成自动起停、电动助力和制动能量回收的功能。例如,搭载1.3L排量的汽油机的奇瑞A 5 ISG混合动力轿车的动力性能可以达到1.6L排量的水平,燃油消耗量降低30%,达到欧Ⅴ排放标准。
永磁同步电机一般分为两种:将反电动势波形和供电电流波形都是矩形波的电机称为直流无刷电机(BLDCM);而将反电动势波形和供电电流波形都是正弦波的电机称为正弦波永磁无刷直流电机(PMSM)。直流无刷电机以其结构简单,维护方便,运行可靠,调速性好等优点,在电动汽车,航空航天以及现代家用电器中应用宽泛。文章以MAT LAB软件中的 SIMULINK为平台,结合SimPowerSystems中的模块,构建ISG系统中直流无刷电机的模型,试验结果验证了该模型的准确性,为电机的调试以及ISG系统控制策略的开发,提供了一定的参考价值。
2 直流无刷电机的数学模型
为简化电机的数学模型,做如下假设:1)三相绕组完全对称,气隙磁场为方波,定子电流与转子磁场皆对称分布;2)忽略齿槽、换相过程和电枢反应等影响;3)电枢绕组在定子内表面均匀连续分布;4)磁路不饱和,不计涡流和磁滞损耗。于是可以得到三相绕组的电压平衡方程[1]:

式(1)中,ua、ub、uc为三相相电压 ;ia、ib、ic为三相相电流;ea、eb、ec为三相反电动势;L为三相绕组的自感;M为每两相绕组间的互感;p为微分算子p=d/dt;由于电机三相采用Y型连接,故:

将式(2)和式(3)代入式(1)中,得到电压方程:

根据式(4)得到电机的等效电路图,如图1所示,电机的反电动势和相电流波形如图2所示。

电磁转矩方程为:

在忽略转动时粘滞系数的情况下,运动方程为:

其中,ω为电机的机械转速;TL为负载转矩;J为系统的转动惯量。
3 基于MATLAB/SIMULINK建立的电机模型
文章采用速度环和电流环双闭环控制的方法对电机进行调速。外环为速度环,内环为电流环。根据模块化建模的思想,将直流无刷电机系统拆分成若干个子模块,包括:电机本体、速度调节模块、电流调节模块、PWM波输出模块、反电动势模块、转速及转矩输出模块等。这种模块化建模的方法具有便于修改,操作性强的特点。如要改变系统的功能或结构,只需对相应的某个模块进行修改即可。系统的总体结构如图3所示。

图3 直流无刷电机系统的总体结构图
3.1 电机本体模块(BLDCM)
应用MAT LAB软件中的PowerSimSystems系统中的相关模块构建出直流电源,逆变器和三相绕组等组件,如图4所示。根据式(4)将电机的abc三相简化为由电阻和电感元件组成,其中在逆变器和电阻之间添加了电流检测模块,在电感元件的后部添加了受控电压源模块,分别用于三相电流的采样输出和反电动势的输入,逆变器的左侧为一个直流电源,以模拟汽车上装载的蓄电池。

图4 电机本体模块
3.2 反电动势模块(B-EMF)
常用的求取反电动势的方法有三种:1)有限元法,该方法以变分原理为基础,需要求解有限元方程组,求解复杂,专业性强;2)傅立叶变换法,用各次谐波叠加得到近似的梯形波反电动势,需要计算大量的三角函数,仿真速度慢;3)分段线性法,以转速和位置为依据,用分段直线方程求出反电动势波形,方法简单,精度较高,文章采用此法。如图5所示,以三组分段直线分别表示三相的反电动势,其中Ke为反电动势系数。由电机学原理可知反电动势与转速和反电动势系数成正比。
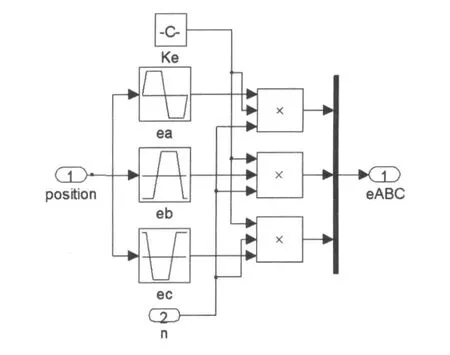
图5 反电动势模块
3.3 位置传感器及换相逻辑模块
本系统中,三只位置传感器在空间位置上相隔120°均匀分布,根据转子位置,位置传感器依次输出高低电平,并且三只传感器的位置信号的相位依次相差120°。换相逻辑模块决定六个开关管的开关顺序,其输入为三个位置传感器的位置信号,输出为逆变器功率开关管的开关逻辑信号,以此实现电机的换相功能[3]。传感器和换向模块分别如图6、7 所示 :

图6 位置传感器模块
3.4 电流采样模块
在理想状况下,直流无刷电机处在两相导通三相六状态模态,每一时刻两相导通,另一相悬空电流值为零。可根据转子位置 θ,判别三相的通断状态并利用图4中所示的电流检测模块,检测非换向相的电流值作为电流的采样反馈值 。例如 ,在 80°≤θ≤150°,可以对 A 相的电流值进行采样,将其作为电机电流的反馈值,该功能可通过SINULINK软件的中SFunction编程完成,输入参数为转子位置及三相电流值,输出为电流采样反馈值。

图7 换相逻辑模块
3.5 电流及转速的PI调节
将目标转速和实际转速之差送入比例积分环节进行PI控制,输出参考电流I_ref值,再将此电流参考值与电流采样得到的反馈值之差进行第二次PI控制,令其输出值为uI。将uI与一个三角波utr进行过零比较,得到斩波信号Switch[4],其数学表达式如下:

3.6 PWM信号输出模块(PWM_Output)
电机电流调整的过程也就是新的脉宽调制(PWM)信号产生的过程。通过调整PWM信号的宽度就可以调整电流的平均值。将电流调节模块中的斩波信号与换相逻辑模块中的六个开关管的通断信号进行“与”运算。其物理意义为:当实际电流小于参考值时,相应的开关管处于导通状态,增大电流的平均值;反之,开关管关闭,降低电流的平均值,以此完成电流的调节,最终实现闭环控制的目的。
3.7 转速和位置模块
根据运动方程(6),通过加减,乘除,积分模即可得到转速及位置模块[5],如图8所示。

图8 转速和位置模块
4 仿真与试验结果
文章在MAT LAB/SIMULINK中对所建立的BLDCM模型进行了仿真。电机的具体参数如下:额定电压U=42V;额定电流I=300A;额定转速n=1500r/min;额定功率P=12kW;电机极数Pn=8;相电阻 R=1.2Ω;电感与互感之差 L-M=0.13mH,负载TL=10Nm。由于在ISG系统中,该电机需要实现倒拖发动机达到怠速转速的功能,因此,我们将电机的目标转速设置为发动机的怠速转速700r/min,进行电机起动过程的仿真,得到电机的转速和A相电流的仿真波形,如图9、10所示。

从图9中可以看到,电机在起动以后的0.1s内即可达到目标转速并保持恒定的转速,具有理想的动态特性,可以满足ISG系统迅速起停的要求。图10显示A相电流的变化趋势,在起始阶段,由于转速还未达到目标转速,电流始终保持导通状态,而在转速达到目标转速以后,脉宽调制(PWM)开始动作,当转速偏高时,开关管关闭以切断电流,电流值为零,当转速偏低时,开关管重新导通,电流恢复。所以我们可以看到电流的仿真波形呈现剧烈的脉动,这就是利用脉宽调制技术对电流进行斩波的结果,以此实现转速-电流双闭环控制。将仿真电流数值在一定的范围内做积分运算,再除以时间长度即可求取平均值,表1显示了电机A相电流的仿真值与试验值较为接近,误差不超过4%。

表1 电机A相电流的仿真与实测值
5 结语
文章通过MAT LAB/SIM ULINK软件,利用模块化建模的思想,建立了ISG系统中的核心组件—直流无刷电机的模型,并且采用了经典的速度环和电流环双闭环控制的方法对电机模型进行控制,其仿真结果与试验数据较为吻合,验证了模型的精确性。从仿真波形可以看出,电机系统运行平稳,具有良好的静态和动态特性。通过该模型建立和仿真,为ISG系统的整体开发提供技术支撑和模型验证,具有较强的现实意义。
[1]JACKA G,MECROW B C,HAYLOCK J A.A comparative study of permanentmagnet and switched reluctance motors for high2per2 formance fault2tolerant operation[J].IEEE Trans.Ind.Appli2 cat.,1996,32:889~895
[2]纪志成,沈艳霞,姜建国.基于 Matlab无刷直流电机系统仿真建模的新方法[J].系统仿真学报,2003,15(12)
[3]卢子广,柴建云,王祥珩,等.电动汽车无刷直流电机驱动系实时仿真[J].系统仿真学报,2003,12(4)
[4]杨向宇,杨进,邹利平.直流无刷电机控制系统的建模与仿真[J].华南理工大学学报(自然科学版),2005,33(8)
[5]Hyoung-Jin Yoon,Se jin Lee.An Optimized Control Strategy for Parallel Hybrid Electric Vehicle[C]//SAE Paper 2003-01-1329,2003
猜你喜欢
电工技术学报(2022年20期)2022-10-29
微电机(2022年8期)2022-10-12
九江学院学报(自然科学版)(2022年2期)2022-07-02
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
机电信息(2022年9期)2022-05-07
微电机(2022年1期)2022-03-21
计算机仿真(2021年11期)2021-12-10
郑州大学学报(工学版)(2020年2期)2020-06-16
电子制作(2019年10期)2019-06-17
汽车电器(2019年2期)2019-03-22