舰艇编队网络化体系协同反导作战分析*
2010-08-11 05:26代进进李相民
舰船电子工程 2010年2期
刘 兵 代进进 李相民 胡 钢
(海军装备部1) 北京 100841)(海军航空工程学院2) 烟台 264001)(海军驻南昌地区航空军事代表室3) 南昌 330024)
1 引言
随着现代信息技术的不断发展和充分利用信息技术使得攻防整体作战能力不断提高,现代海战越来越呈现体系对体系的对抗,尤其在高强度的空袭与反空袭作战中显得更加如此[1]。伴随新技术的发展和大量精确制导武器的使用,空袭兵器的速度越来越快,射程越来越远,突防高度越来越低,机动性能越来越好,抗干扰能力、实施防区外作战能力越来越强。在未来海战场上,舰艇编队所面临的主要威胁是反舰导弹和飞机等,但从威胁的程度、威胁的强度以及拦截的难度看,反舰导弹是舰艇编队最难对付的作战对象[2]。面对海上战场反导防御作战的新挑战,应该增加舰艇编队超视距反导作战能力,应该建立以网络为中心的舰艇编队协同反导作战体系[3]。因此,舰艇编队网络中心化体系是舰艇编队适应体系对抗与信息作战的必然选择,舰艇编队网络化作战是防空作战的发展趋势。
2 功能体系结构
网络化舰艇编队协同反导作战系统的功能体系结构如图1所示[4]。
网络化舰艇编队协同反导作战系统划分为三层逻辑网结构,即传感器网、指控信息网和武器网,三层逻辑网建立在信息网络基础之上。该结构打破了传统的火力单元编制的界限,突出强调作战区域内资源的共享、整体作战效能的提高。

图1 网络化舰艇编队协同反导系统功能结构图
在图1中,指控信息网主要负责作战指挥和武器控制,向上级指挥机关汇报作战情况以及接收上级命令,同时对所属武器装备进行控制;从传感器网获取态势信息,包括目标数据、拦截弹数据以及预警、探测和跟踪雷达的状态信息;对传感器网下达任务并实施控制;对武器网下达发射命令,控制导弹的发射,并对制导数据进行处理和计算以及对己发射的拦截导弹实施中段制导。传感器网的主要任务是搜索、跟踪目标等;武器网的主要任务是接受命令发射导弹等。
网络化舰艇编队协同反导作战系统各节点之间的关系如图2所示。

图2 各功能节点之间的关系
2.1 传感器网组成和功能
传感器节点包括探测节点和跟踪节点。传感器网的功能是有效覆盖所监视的空域或地域,及时发现和识别目标,以足够的精度和数据率测定其坐标和运动参数,判定其威胁,并在各种对抗环境中保持其监视和跟踪的连续性,为及时展开和使用防空兵器,定下射击决心,进行发射和拦截控制提供基础。为保证传感器网有效运作以及信息服务的有效实现,还必须对探测跟踪雷达进行有效控制,对传感器信息进行有效管理。各节点功能如表1。

表1 传感器网节点功能
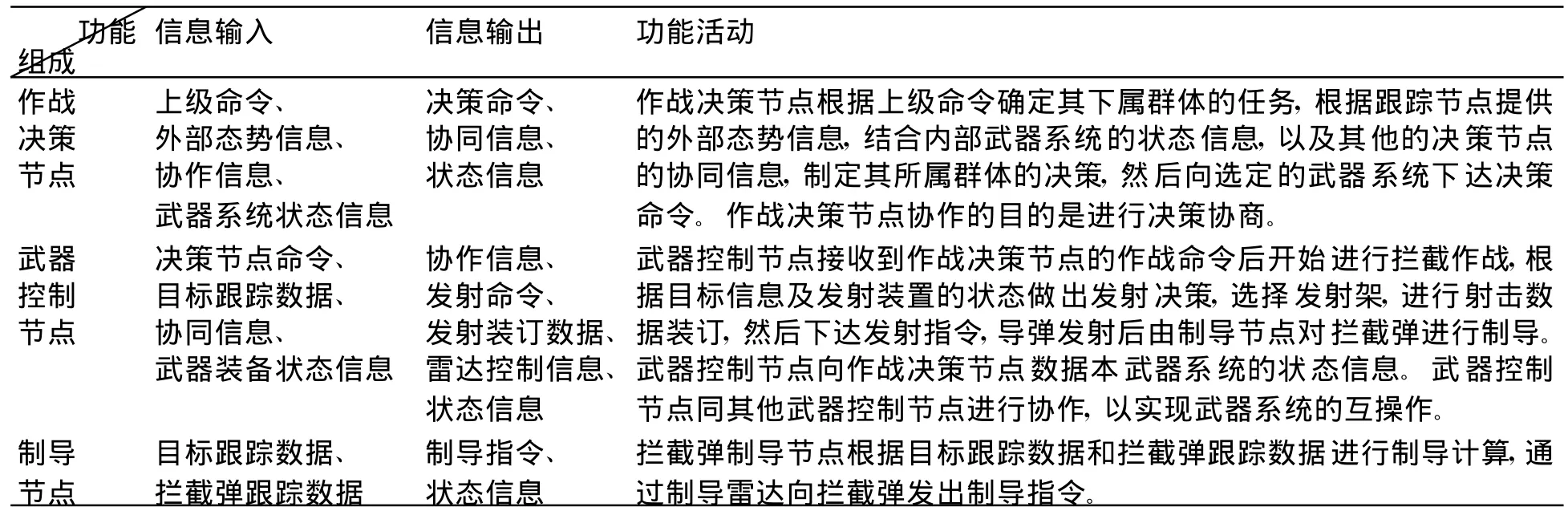
表2 指控网节点功能
2.2 指控信息网组成和功能
在整个舰艇编队网络化体系中,指控信息网是整个系统的“神经中枢”。它利用传感器网提供的目标数据,进行威胁判断,确定目标威胁程度和等级,根据作战规则和作战资源为目标分配跟踪雷达和火力作战单元,根据目标跟踪数据评价打击效果等。此外,指控信息网协调各作战单元的作战,进行网络管理以及任务交接等。协同反导系统指控信息网由防空导弹系统各级指控中心组成,把每个指控中心视为指控节点,其包括作战决策节点、武器控制节点和制导节点,各节点的具体功能如表2所示。协同反导作战的基本原则是“集中指挥,分散控制”,上层的防空指挥机构主要是掌握总的态势,确定原则和分配任务,而作战任务的执行控制则需由武器的指控系统来实施。因此舰艇编队协同反导作战系统中指控节点可从功能上分为两个层次:指挥层次和武器控制层次。
2.3 武器网组成和功能
武器网是由区域内所有的舰空导弹发射系统及舰空导弹组成。把每个发射装置或舰空导弹视为一个武器节点,各节点的具体功能如表3所示。武器网主要是通过对区域内舰空导弹的集中使用,形成最优的火力配系来对抗来袭敌方目标,形成火力集中的效果,达到最佳的对抗效果。武器网是防空作战中对抗行动的执行部分。
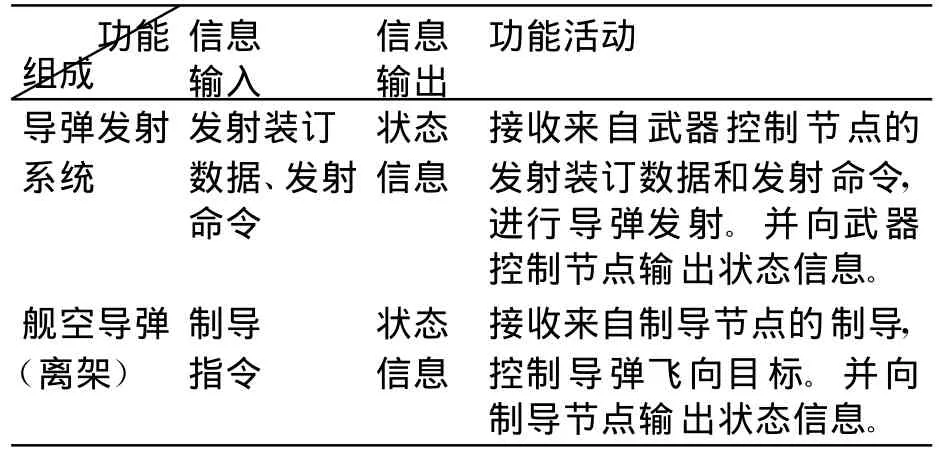
表3 武器网节点功能
3 协同反导作战过程
3.1 作战模式
网络化舰艇编队协同反导作战利用分布在多个平台中的资源,这些资源在网络中心作战系统的支持下形成一个整体。由于采用高速、大容量的通信系统,使得数据在不同平台之间传输的时间延迟极少,因此,对导弹的发射、制导过程可以利用不同平台上的数据完成,其协同反导作战过程如图3所示。导弹的发射和制导取决于跟踪雷达获得的制导火控数据,当跟踪雷达不在发射平台上时,必须在多个平台之间进行协同作战。在协同作战过程中,协同作战控制中心通过网络化的连接可在多个平台之间保持对目标跟踪的连续性。
这种协同反导作战的功能重点体现在运用导弹进行超视距攻击或拦截。由于地球曲率的影响,利用单平台上的探测和跟踪数据进行导弹攻击或拦截,其作用距离为视距。在协同反导作战中,由于平台之间的跟踪数据可以共享,而且时间延迟很小,因此,对于作用距离大于视距的导弹来说,完全可以利用其它平台的跟踪数据进行发射和制导,实施超视距攻击或拦截。

图3 协同反导作战指挥控制过程
3.2 作战流程
舰艇编队协同反导作战示意图如图4所示。

图4 网络化舰艇编队协同反导作战示意图
舰艇编队网络化体系下,导弹发射平台自身的制导设备已经不能满足舰空导弹的制导需求了,必须将各制导平台组成一个制导网络来共同完成导弹的制导。如图4所示,根据协同方式的不同可分为以下两种作战模式。
样式Ⅰ:预警机与舰艇协同,即平台A发射的舰空导弹,经过一段时间后,脱离自己的制导范围,将制导权转交给平台E(空中预警机),由预警机引导其飞向目标。
样式Ⅱ:舰舰协同,即离目标较远的平台C发射的舰空导弹,同样经过一段时间后,脱离自己的制导范围,将制导权转交给平台B,由离目标较近的舰艇引导其飞向目标。
在这里我们只考虑了两个制导平台的协同,也可以采用多个制导平台的协同。
舰艇编队系统反导的整个作战流程如图5所示。

图5 舰艇编队协同反导作战流程
目标搜索指示系统(包括提供预警信息的预警雷达和为目标跟踪系统提供目标指示信息的雷达,以及预警卫星、预警机等)在作战区域搜索、探测目标,将探测到的目标信息传送给目标跟踪系统(位于预警机或直升机平台上),跟踪系统随时截获目标进行跟踪,并将准确的跟踪信息传给舰艇编队指控信息网。指控信息网中作战决策系统首先通过对外部态势信息处理评定,进行目标识别、可拦截性判断以及威胁排序,然后在此基础上,根据系统内部各作战要素的状态作出作战决策,进行统一的任务分配和资源配置,确定进行拦截打击的作战单元;武器控制系统接收到作战命令后,装订导弹发射数据,控制导弹发射;导弹反射出去后,制导系统跟踪并引导导弹飞向目标。
4 作战优势及技术挑战
4.1 舰艇编队网络中心作战优势[1]
1)提高了体系的反应速度和抗饱和能力
在舰艇编队网络化作战情况下,由于共享信息,可以采用超视距拦截、接力拦截等方式,这样在饱和攻击方向,防空导弹系统的火力通道数大大增加,扩大了多重火力覆盖区,提高了对目标的拦截次数。
2)提高了反隐身能力
利用隐身目标各个部位后向散射特性的不同,多平台联合探测有利于提高对隐身目标的发现距离和发现概率。比如隐身飞机上方隐身能力很弱,如果将空中机载雷达与舰艇雷达立体组网,将获得更好的反隐身效果。
3)提高了对抗干扰目标的能力
在干扰环境下,通过雷达组网探测,能够有效地识别真实目标并对目标进行定位。
4)提高了体系的重组能力和抗毁能力
面对空袭体系与反空袭体系日益激烈的对抗,无论是指控节点、传感器节点还是武器平台,都不能完全避免被毁伤的可能。网络化体系结构下,通过指控的可变中心,能保证任何时刻都有一个指挥控制节点,持续行使集中统一的指挥控制功能,避免出现重复射击和漏射击的情况。在一个火力单元传感器被毁,相邻火力单元发射装置部分被毁或弹药耗尽时,通过作战资源的动态重组,可使原先失去作战能力的装备,重新投入作战,体系抗毁能力大大提高。
5)解决了舰空导弹的杀伤区受制于单个制导平台威力限制的问题
原来针对低空目标由于视距的限制,舰空导弹低空杀伤区大幅度收缩;对于反舰导弹、隐身飞机等小目标特征的目标,由于制导雷达探测踉踪距离大幅度下降,导致防空导弹杀伤区收缩。在网络化条件下,由于制导信息的共享,制导雷达网络中任何一部雷达探测到目标,或通过组网方式探测到目标,则整个网络都可感知到,防空导弹的杀伤区不再受单个制导雷达威力的限制,使得防空导弹的低空杀伤区能够扩展,针对小目标的水平杀伤区也能够扩展。
4.2 舰艇编队网络化体系技术挑战
实现舰空导弹网络中心化体系结构和网络中心化作战,还有许多关键技术需要攻关。
1)高速数据链网络技术[5]
战术数据链是实现战场及时、有效管理和了解高密度、快速变化的作战态势而进行信息传递的网络;是舰艇编队协同反导作战得以实现的基本技术手段。没有高速数据链网络,舰艇编队协同反导作战就不可能实现。
2)多传感器组网以及数据融合技术[6~7]
传感器组网是指根据现有传感器资源的特点合理地对不同传感器组进行联网,从而形成一个统一的有机整体。通过组网,在扩大作战系统视野的同时提高了各作战兵力的协同能力,进而大大增强了作战能力。数据融合则是利用计算机技术对来自多传感器的信息按时序和一定准则加以自动分析和综合的信息处理过程。多传感器组网以及数据融合技术主要包括以下几个方面内容:
(1)时空统一与误差校正技术;
(2)多雷达动态组合及控制技术;
(3)雷达组网条件下的协同探测、跟踪、识别技术;
3)多武器系统指控技术
多武器系统指控技术旨在集中作战区域内的所有作战资源,进行优化配置,发挥总体作战效能。其主要包括以下内容:
(1)多作战节点动态组网技术,即组合火力控制(IFC)技术;
(2)分布式多节点指挥控制技术;
(3)多目标航迹快速计算技术;
(4)多目标威胁判断和多作战节点武器分配技术;
(5)基于网络的作战效果评估技术。
4)超视距协同制导技术[8~11]
超视距协同制导技术,能够扩大舰空导弹的拦截空域、延长拦截时间和增加拦截次数,能够大幅度提高舰艇编队防空反导能力和舰艇编队抗反舰导弹饱和打击能力。其主要包括以下内容:
(1)超视距协同制导杀伤区域确定技术;
(2)协同制导平台优化部署技术;
(3)制导平台选择及制导接力技术;
(4)超视距协同制导飞行弹道交班控制技术。
5 结语
本文对网络化舰艇编队协同反导作战系统进行了初步探讨,描述了舰艇编队协同反导作战系统网络化作战的功能体系结构,介绍了三层网络的组成和功能,以及三层网络之间的关系,深入分析了舰艇编队协同反导作战过程,并阐明了舰艇编队网络化体系的作战优势和新的技术挑战。本文的研究对舰艇编队协同反导作战理论体系的完善具有一定的理论指导意义。
[1]陈立新.防空导弹网络化体系效能评估[M].北京:国防工业出版社,2007,11
[2]李敏.海军反空袭作战研究[J].指挥控制与仿真,2002,24(1):1~4
[3]滕克难.基于多Agent舰空导弹协同反导作战体系结构研究[J].火力与指挥控制,2008,33(3):117~119
[4]张国.混编防空导弹网络化作战概念及协同机制研究[D].长沙:国防科学技术大学研究生院,2005
[5]蓝伟华,喻蓉.多机编队协同空战的概念及关键技术[J].电光与控制,2005,12(6):12~15
[6]陈康,阳东升,李恒峰,等.TCN的海军多平台协同作战传感器管理体系结构[J].火力与指挥控制,2008,33(4):12~15
[7]王航宇,胡锋平,王辉华,等.传感器组网的关键技术[J].火力与指挥控制,2005,30(4):118~120
[8]王祖典.网络中心制导技术[J].电光与控制,2005,12(4):38~39
[9]梁大伟,郭万海,孔令富.预警机引导导弹超视距攻击分析[J].舰船电子工程,2006,26(5):66~67
[10]张德源.舰空导弹超视距反导作战研究[J].飞航导弹,2007(12):15~18
[11]谢希权,易华.空对空多枚导弹同时制导概念研究[J].电光与控制,2001(8):26~29
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
小哥白尼(军事科学)(2020年3期)2020-07-27
小哥白尼(军事科学)(2020年4期)2020-07-25
小哥白尼(军事科学)(2020年5期)2020-05-22
小学科学(学生版)(2019年3期)2019-03-30
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
太空探索(2014年1期)2014-07-10