
激光定位技术在水利工程规划沙盘展示系统中的应用研究
2010-07-20 02:42王军
山西水利科技 2010年3期
王军
(山西省数字水利中心,太原 030002)
1 问题的提出
1.1 山西水利工程规划沙盘介绍
“山西省水利电子沙盘综合展示系统”将计算机、现代通讯、3S、三维仿真、多媒体等技术与传统沙盘模型相结合,通过直观、形象的方式展示全省地形、地貌以及重点水利工程建设和规划情况,同时还可为决策提供一定依据。自2008年7月建成后,该系统一直作为山西新水源工程规划、建设及运行情况的重要展示舞台,其最大的亮点主要表现在以下3个方面:
1)光电感应、无线通讯技术的应用,提升了系统的可操作性和互动性[1]。系统已经实现了35个新水源工程、已建大中型水库等点的精确定位。
2)多媒体技术的灵活应用,拓展了系统的展示功能[1]。目前采用文字、表格、图像、视频、3D模型等多种展示方式。
3)沙盘模型和电子沙盘同步,增强了展示系统的应用能力。电子沙盘基于ArcGIS桌面应用平台下的3D可视化软件ArcGlobe,它提供了海量地理数据的交互式可视化,允许全球、区域和小场景等多分辨率数据间的无缝过渡,可实现宏观定性与微观定量、全局规划与局部研究的统一。目前,其数据采用了全省 1:10000 DEM和 DOM基础测绘成果、1:50000地形图和卫星影像、1:250000地形图以及水利相关各类业务数据。
1.2 存在的问题
电子沙盘强大的数据支持、灵活的展示方式、方便的拓展能力是传统沙盘不可比拟的,但其显示效果、真实感较差,信息的同时展示量以及多视角同时会商能力相比传统沙盘模型还有很大差距。将传统沙盘模型与现代电子沙盘有机结合并实现联动,逐步提升沙盘系统综合展示能力是数字中心当前乃至今后一段时期内的一项重要任务。
目前数字中心通过在沙盘上安装固定激光感应点的方法,虽然基本上实现了沙盘模型和电子沙盘的关联,满足了目前我省重点水利工程规划成果展示的需求,但是该方法还存在以下几点不足:
1)线路复杂,维护困难。沙盘下复杂的线路给系统维护带来一定困难,所有硬件维护必须专业人员爬进沙盘下狭窄、布满线路的空间中进行。往往一个简单的故障,拖延好几个月得不到维修。沙盘下实景照片如图1所示。

图1 沙盘模型下实景照片
2)端口限制,难以扩充。目前,沙盘工控机所采用的RS-485(通用计算机串行总线)多点数据通讯方式,最大可支持128个串行端口,目前已经安装了121个,也就是说系统仅有扩充7个端口的能力,这对于今后不断扩展的业务需求来说是远远不够的。
3)操作繁琐,不太友好。为了防止其他光源的干扰,感光点只对特定调制频率(约200Hz的方波)的光信号敏感,感应激光笔必须用特制的调制、面光斑(容易瞄准感光点)激光笔。讲解员在讲解的过程中,一手拿感应激光笔,另一手拿讲解激光笔(兼激光教鞭和PPT翻页功能于一体),操作中很容易混淆。
4)功能单一,应用面窄。沙盘模型上,有明确标志的地物点有数千个。在水利工程规划及建设的过程中,难免有需要了解其他非感应点的更精细的电子地图、详细资料等信息。同时,展示内容也应随今后业务侧重点的不同而有所变化。
因此,设计一种简单、灵活、易于维护、扩充方便、适用面广的关联方法是很有必要的。经多方调查,目前在国内还没有发现有针对大型实景沙盘类似的成熟的设备或成功的案例。
2 解决问题的基本思路与方法
2.1 水利工程规划沙盘的特点
数字中心水利工程规划沙盘属地形地貌类永久性沙盘模型,它采用微缩实体的方式来表示地形地貌特征,并在模型中体现山体、河道、水库等物,主要表现的是地形数据。水利要素在沙盘上大都以点、线、面、微小体等形态,采用覆盖于沙盘表面的形式展示。沙盘总体呈向上的连续曲面。
为了更直观地展示山西地形地貌,沙盘模型在制作过程中采用了非等比例设计,即在水平方向上采用的比例尺为1:120000,垂直方向上则采用1:12000,也就是说通过垂直方向上的10倍拉伸,使地形表现更加直观。
2.2 激光三角测量法的基本原理
三角测量法也叫几何测量法,是一种传统的测量方法,其基本原理是利用三角形边角关系进行位移或距离测量。从大到天体测量,小到微米级物体测量,这种方法成功的应用在工程测量的方方面面。
激光三角测量法就是用激光作为光源利用三角法进行测量[3]。其基本原理是:用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,那么随着物体表面激光照射点的位置或者高度不同,像平面上像点的位置也将发生变化,用CCD、CMOS或PSD等光电探测器测出光斑像的位置,就可以计算出物体表面激光照射点的位置或者高度。当物体沿光线方向发生移动时,测量结果就将发生改变,从而实现用激光测量物体的位移。同理,当激光入射角度发生变化时,表现为光斑在物体表面的位移,测量的结果也将发生变化,即实现了激光点定位。如图2所示。
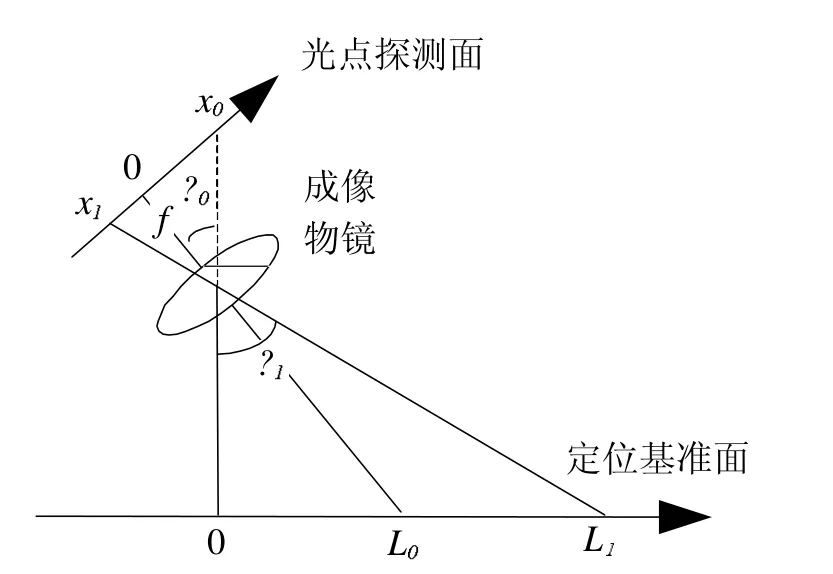
图2 激光三角法原理图
以一维情况为例,不难得出待测激光点位置的计算公式为:

式中:L1——待测激光点到基准面坐标原点的距离;
d——成像物镜中心点到定位基准面的距离;
f——成像物镜后焦距;
θ0——光敏面与定位基准面之间的夹角;
a——待测激光点的像点到基准面原点像点的相对位移,a=x0-x1。
从式(1)可以看出,该关系为非线性关系,通过该式可以计算出待测点在基准面上的相对位置。
激光三角法由于其具有非接触、高精度、结构简单、抗干扰、无损、快速等特点,具有很强的实用性。近年来,随着电子技术的飞速发展,特别是半导体激光器和CCD等图像探测器的普及,设备成本逐步降低,精度不断提升,激光三角测量法已经逐步从理论研究走向实际应用。
那么,利用光点探测器对照射在沙盘表面高亮的激光斑点进行自动定位,即可判断出所选择的标志地物或指向的地理坐标,从而实现沙盘模型和物理沙盘的联动。这种方法应该是一种简单实用的实现沙盘模型与电子沙盘同步的方法。但是在实际应用中,被测表面的高低起伏、颜色、材料、粗糙度、光学特性以及表面曲率等对测量结果有较大的影响,特别是遮挡和阴影等现象仍然是困扰研究人员的主要问题。
如图3所示,当待测面非平面时,我们实际上关心的是待测点S在基准面上的投影点S′相对于坐标原点的位移,但是通过式(1),实际上得到的是通过物像两点的直线与定位基准面的交点L1相对于坐标原点的位移,两者之间产生误差。并且这种误差随着探测角度与定位基准面法线夹角的增大而增大。那么,如何较为准确地得到待测点相对于基准面的位移呢,可以采取两种方法,一是尽可能地缩小探测角度以减小误差,二是采用机器双目视觉测量法,下面分别加以说明。

图3 三维曲面测量误差说明
2.3 缩小探测角度法
由于水利工程规划沙盘的空间尺度非常大,沙盘室的高度有限(相对高度差仅有2.5m),在这种情况下,探测器的可探测范围必然很小。为了探测整个沙盘,只能将二维位置敏感探测器PSD阵列放置的方式进行全场定位[2]。这种方法可以实现非常精确的定位或测量,但是其附加电路比较复杂,安装难度较大,不太适合本系统较为简单的应用需求。
2.4 机器双目视觉测量法
机器双目视觉测量法是基于光学三角法,通过模拟人眼视物原理进行测量的。即通过两台摄像机从不同角度同时获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域有着广泛的应用前景。图4为原理图。
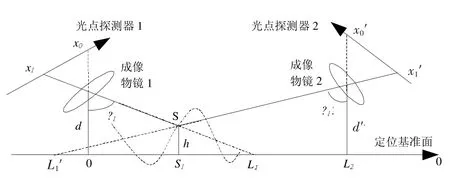
图4 机器双目测量原理图
据此原理,结合不同应用需求,可以形成许多种不同的双目视觉系统。不同的结构适用于不同的应用场合。对要求大测量范围和较高测量精度的场合,采用基于双摄像机的双目立体视觉系统比较合适。图5为两种双目探测器安装示意图。

图5 双目探测器安装位置图
基于双摄像机探测的双目立体视觉系统必须安装在一个较为稳定的平台上,在进行测量前必须对测量系统的参数进行精确标定,测量中必须确保摄像机的内参(指前后焦距、光轴方向等)和两个摄像机相对于沙盘的位置不变。一旦发生变化,必须重新标定。
3 实验研究
由于数字中心沙盘模型上方已经安装了两台摄像机,下面结合这两台摄像机,采用机器双目视觉测量法进行激光点定位实验,并针对实施中可能遇到的一些具体环节,提出相应的处理方法。
3.1 噪声点的影响及消除
在实际应用中,沙盘表面不可避免地存在各种干扰信号,主要有标志地物用的LED灯,金属、玻璃等物体反射背景光源形成的高亮点。如图6所示。图中激光点的亮度,相对于噪声点并不占据绝对优势,可以采取两种方式滤除噪声信号。
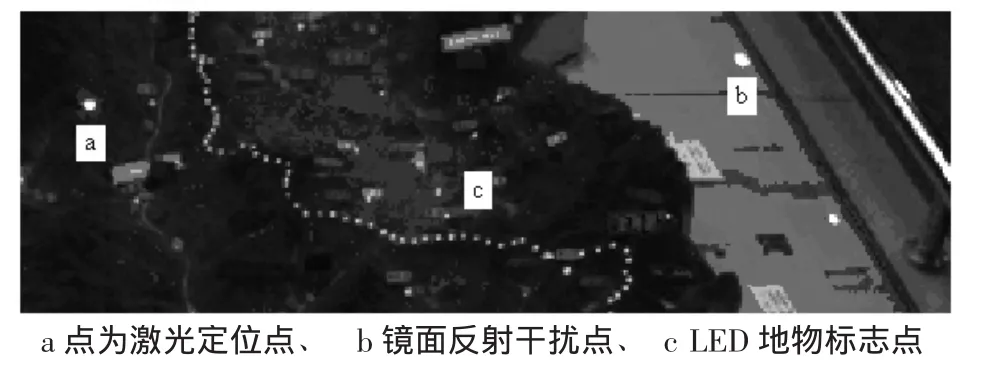
图6 沙盘上各类干扰点
1)图像相减法:噪声点基本上是沙盘上的固定点,可以采取预先拍摄噪声图,与含激光定位点的图进行相减操作,这种方式可以消除大部分噪声信号。
2)滤波法:可分为光谱滤波法和数字滤波法。
数字滤波法属于计算机图像处理范畴。光谱滤波法是在透镜前安装只有特定波段光才能通过的光谱滤波片,滤除杂散光。滤波片可以选用普通红绿蓝单色滤波片,也可以使用专门针对激光光源的带通滤波片。图7为某型号窄带滤波片的光谱特性图。很明显,在可见光波段,只有波长介于505~545nm间的绿光才可以通过。

图7 某窄带干涉光谱滤波器穿透率光谱特性图
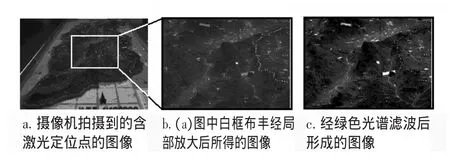
图8 光谱滤波实验图
实验中采用计算机滤波处理滤除其他颜色的光,如图8所示。很明显,滤波可以很好地消除干扰信号。在实际应用中,窄带滤波片一般采用薄膜干涉法原理制作,大尺寸的均匀干涉滤光片制作难度很大,一般滤波片的直径都小于50mm,可以考虑把滤波片放置在成像物镜后端。另外,干涉滤光片一般要求垂直入射,当入射角增大时,通过带向短波方向移动。所以,激光波长应位于滤波片穿透带的短波边缘侧,这样可以获得最大的入射角度。
3.2 定位精度研究
3.2.1 激光光斑大小的影响
光点在感光面上占据的像素大小与感光单元及激光光斑的大小有关。原则上以在光敏面上占据5~10个像素为好,由于探测器每个单元上只有部分区域是可以感光的,若光斑太小成像在非感光区,则无法探测到信号或信号很弱,光斑太大则分辨率降低;通过拟合光斑中心可以精确定位到亚像元级(0.2个像素间距)。
3.2.2 曲面高度的影响
若用单摄像机探测,入射角越大、定位点相对于基准面的距离越大定位精度越低。若采用双目视觉测量法,定位点与两台摄像机之间所张的角度越大定位越精确。但是,随着距离增大,摄像机在其中一台摄像机上定位点被遮挡现象越频繁,如何选点,需要在具体应用中研究。
3.2.3 数据配准
根据探测到的光斑位置,我们得到的是激光点在沙盘模型上的相对位置,属于自定义坐标系。要想和电子沙盘关联,必须转换成电子沙盘采用的WGS84地理坐标系。这个过程可以通过选定数个(至少四个)参考点,通过精确配准以及投影变换的方法实现。
3.3 设备选型
3.3.1 摄像机选型
目前市面上主要有CCD和CMOS两种类型的摄像机。CCD摄像机具有动态范围大、分辨率高、噪声小的优点;CMOS摄像机则具有价格便宜、响应速度快、可塑性好的特点。由于摄像机仅用于激光点的定位,背景噪声、动态范围对系统影响不大,关键是响应速度和可塑性(多台摄像机与DSP整合问题),因此,选用CMOS摄像机比较合适。
3.3.2 定位激光笔的选型
沙盘上本身安装有许多发光二极管,为避免干扰,应选择与沙盘上固有发光体颜色反差较大颜色的激光笔。在此基础上还要参考摄像机光谱响应特性以及人眼视觉响应特性选用合适波长的激光笔。通过对比,建议选用亮度较高的绿光半导体激光器。
[1]荣榕,管化冰,家勃.山西省水利工程规划沙盘模型的电子演示系统软件的功能扩充与完善[J].山西水利科技,2009(4):58-60.
[2]庞亚萍.位置敏感探测器的发展状况及应用研究[J].科技情报开发与经济,2006 16(24):183-184.
[3]吴兆喜,黄元庆.基于光学原理的三维形貌测量技术研究[J].光学技术,2006 32(zl):654-658.
猜你喜欢
幼儿园(2021年3期)2021-07-28
海峡科技与产业(2021年1期)2021-05-22
金属加工(冷加工)(2021年3期)2021-03-27
福建基础教育研究(2020年1期)2020-05-28
电子制作(2019年20期)2019-12-04
测控技术(2018年4期)2018-11-25
现代计算机(2016年11期)2016-02-28
新疆地质(2015年1期)2015-11-18
当代经济(2015年4期)2015-04-16
新疆石油地质(2015年2期)2015-02-28
