
GPS软件接收机跟踪环路设计
2010-07-13 06:01曹可劲马建国
电子设计工程 2010年2期
李 豹,曹可劲,马建国
(海军工程大学 导航工程系,湖北 武汉 430033)
接收机是全球导航定位系统(GPS)用户端的主要设备,随着软件无线电技术的发展,软件接收机由于其灵活、可扩展、经济等优点成为当前的研究热点[1]。而GPS信号的捕获与跟踪是软件接收机的核心部分。捕获算法中,并行码频域搜索算法由于其无可比拟的速度优势已成为经典算法,而跟踪算法在环路鉴相器以及环路参数的选择上却很灵活。目前国内GPS软件接收机跟踪环路参数设计多根据已有经验值[2],文献[3]给出部分参数的设计准则,但尚无不同环路参数的对比研究。本文在分析GPS软件接收机跟踪原理的基础上,首先比较码环与载波环不同鉴相器的性能,然后对二阶锁相环中不同环路参数设置下的跟踪效果进行仿真分析,最后设计了合适的码环与载波环路,并用实际采集的GPS数据论证了所设计环路的有效性,为GPS软件接收机跟踪环路的设计提供了参考。
1 GPS跟踪基本原理
1.1 数学原理
GPS信号跟踪是利用捕获到的粗略码相位和载波多普勒频移实现本地信号与输入信号的准确同步,从而提取出导航电文。其数学原理[4]97如下:
单颗GPS卫星信号经滤波、下变频、A/D转换后得到数字中频信号,其数学模型为:

式中,sk(n)为中频信号,Ck(n)为 C/A 码,Dk(n)为导航电文,ωIF为中频信号角频率,e(n)为噪声信号,k为某颗卫星编号。
sk(n)中频信号与由本地载波环数控振荡器NCO(numerical controlled oscillator)产生的载波复本 cos(ωIFn)相乘,并经低通滤波器后为:

该信号再与码环产生的精确对准码相位的C/A码Ck(n)相乘,得到:

式中,NDk(n)为导航电文 Dk(n)与累加信号点数 N的乘积。
1.2 跟踪环路
1.2.1 码跟踪环路
码跟踪环路用于保证精确对准输入信号C/A码的位置。通常使用一种延迟锁相环DLL(delay locked loop),也称码超前-滞后跟踪环路。在该环路中,伪码发生器产生超前(E)、即时(P)和滞后(L)3路信号,它们各相差0.5个C/A码元,分别与去载波后的输入信号进行相关,通过观测这3路相关值来判断本地C/A码的前后移动。为了降低跟踪环路对本地载波相位对准程度的要求,码环通常设计成I、Q两路正交形式[4]97,如图1所示。

图1 码跟踪环路
DLL环路需要鉴相器产生反馈来判断本地码发生器是否需要调整,常用的码环鉴相器及其性能[5]122如下:
1)相干鉴相器 (IE-IL)是最简单的码鉴相器,无需Q支路,但对载波环路要求很高。
1.2.2 载波跟踪环路
载波环使用一种对180°相位跳变不敏感的Costas环来保证对输入信号载波相位的精确跟踪。Costas环路框图如图2所示。
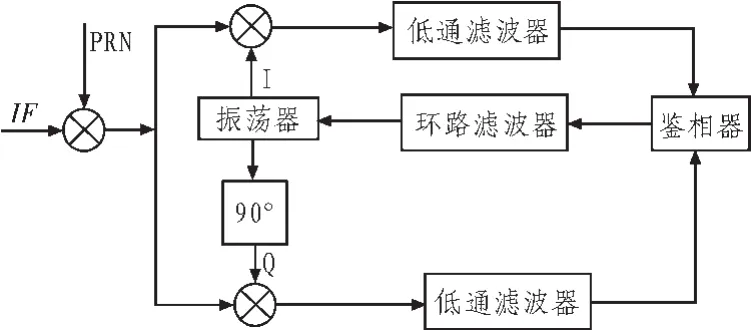
图2 载波跟踪环路框图
载波环常用的鉴相器及其特性[5]122如下: 1)sign(Ik)Qk:最小计算量,输出正比于sinφ;2)IkQk:中等计算量,输出正比于 sin(2φ);3)tan-1(Qk/Ik):最大计算量,输出即为相位误差。
1.3 二阶锁相环
DLL环和Costas环都可以用一个线性的相位锁定环路模型[6]134-137来分析其性能。该模型即二阶锁相环,如图3所示。
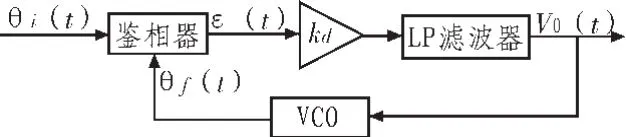
图3 二阶锁相环框图
二阶锁相环包含1个一阶滤波器和1个压控振荡器VCO(voltage controlled oscillator),其传递函数分别为 F(s)和N(s)。

式中,τ1,τ2为滤波器系数。

式中,k0为VCO的增益。
由图3得到二阶锁相环的转移函数为:

将式(4)和式(5)代入式(6),有:
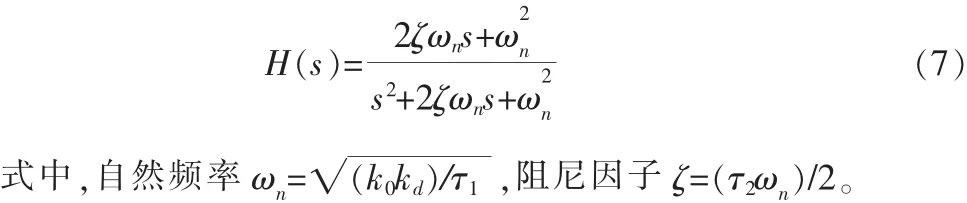
而自然频率ωn与环路噪声带宽BL的关系[6]137为:

由上述分析可知:设定环路的BL,ζ和增益k0kd这3个参数即可得到环路的传递函数,进而得到整个环路信息。
2 算法实现与分析
2.1 环路参数对跟踪效果的影响
为分析环路参数对跟踪效果的影响,必须用特定的GPS信号跟踪仿真。为简化程序,在Matlab环境下对单颗GPS卫星中频信号进行仿真。设置中频信号频率f=4.309 MHz,采样率fs=12 MHz,仿真信号的C/A码相位、载波多普勒偏移、信噪比都为可设参数。由于环路增益k0kd对跟踪效果的影响并不复杂,这里只讨论阻尼因子ζ和噪声带宽BL对跟踪效果的影响。
2.1.1 阻尼因子ζ对跟踪效果影响
阻尼因子ζ决定锁相环到达最终稳态值的速度,ζ值越小,锁相环到达稳态值的速度越快,但同时锁定过程中的超调量也越大。设定初始输入相位误差为60°,在不同的ζ值下,二阶锁相环鉴相器输出如图4所示。由仿真结果可知,ζ值取0.7时,环路很快到达稳态值时间,同时超调量又不大,为环路设计的合适值。

图4 不同阻尼因子下相位误差
2.1.2 环路噪声带宽BL对跟踪效果影响
噪声带宽BL决定锁相环内所能容纳的噪声量,同时也能影响环路的动态性能。载波环开始工作时,初始频率为捕获阶段给出的频率值,这与实际信号的频率有一定的偏差,锁相环会逐渐地锁定真实频率。设定GPS仿真信号的频率为4 312 272 Hz,捕获到的频率为 4 312 300 Hz,存在-28 Hz的偏差,在不同的BL下进行仿真,结果如图5所示。
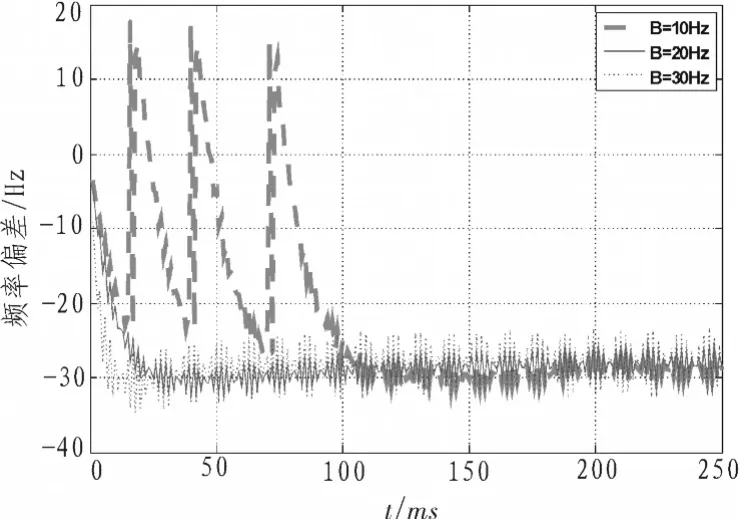
图5 不同噪声带宽下载频偏差(真实偏差-28 Hz)
由仿真结果可知,当BL值较小为10 Hz时,锁相环经多次抖动才锁定频率值;当为20 Hz时,锁相环较快锁定频率,锁定值的噪声也较小;当为30 Hz时,锁相环很快锁定频率,但噪声值较大。所以合理选择噪声带宽值对跟踪效果影响很大。
2.2 实际信号的跟踪
由上述分析可知,锁相环的阻尼因子和环路噪声带宽对跟踪都有影响。在对实际GPS信号进行跟踪的过程中需要不断调节码环与载波环的参数值,以确定合适的环路参数。这里设计合适的载波环与码环,用实际采集的GPS信号对所设计的环路跟踪效果进行验证。跟踪后I、Q两路在某段时间输出如图6所示。
环路设计中,DLL和Costas环鉴相器分别选择非相关归一化和反正切形式,环路参数设定如表1所示。
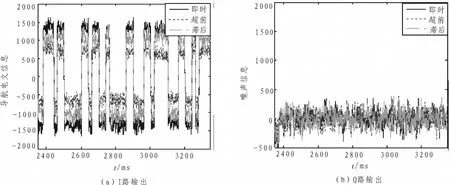
图6 I、Q路的超前、即时、滞后输出
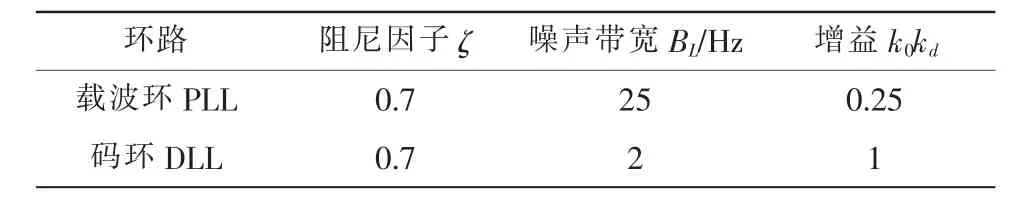
表1 PLL与DLL环路参数设计
3 结论
本文论述GPS软件接收机跟踪环路的设计。首先比较载波环与码环不同鉴相器的计算量以及性能,然后在不同的阻尼因子ζ和噪声带宽BL参数值下对锁相环的跟踪效果进行仿真比较,最后选择了一组鉴相器并设计合适的环路参数对实际的GPS信号进行跟踪,跟踪结果验证了所设计环路的有效性。用DSP实现实时的GPS软件接收机[7]是本文的后续工作。
[1]Dinesh Manandhar.Development of L1-band C/A code software-based GPS receiver[R].The University of Tokyo,2002.
[2]鲍雍荣.GPS软件接收机的C++/Matlab实现[D].上海:上海交通大学,2007.
[3]唐康华,吴美平,胡小平.基于射频前端的GPS软件接收机设计与验证[J].中国惯性技术学报,2007,15(1):51-54.
[4]Kai Borre,Dennis M Akos,Nicolaj Bertelsen,et al.A softwaredefined GPS and galileo receiver(A single-frequency approach)[M].Boston.Basel.Berlin,2006.
[5]Kaplan E D,Hegarty C J.GPS 原理与应用[M].寇艳红,译.北京:电子工业出版社,2007.
[6]James Bao-yen Tsui.Fundamentals of global positioning system receivers:a software approach[M].2nd ed.New York:John Wiley&Sons Inc,2005.
[7]汪忠华,章益品,姚银花,等.基于ARM的GPS地面目标跟踪及报警系统的设计与实现[J].电子设计工程,2007,15(6):34-37.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
上海公路(2018年4期)2018-03-21
无线电工程(2017年10期)2017-09-28
电测与仪表(2016年5期)2016-04-22
电测与仪表(2015年9期)2015-04-09
国防科技大学学报(2015年3期)2015-03-09
电子设计工程(2015年6期)2015-02-27
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28
