
基于CATIA平台的Framework装配技术
2010-07-09 01:40母德强
长春工业大学学报 2010年1期
母德强, 王 可
(长春工业大学机电工程学院,吉林长春 130012)
0 引 言
产品从概念到生产离不开设计这个环节,无论是大型还是微型产品在生产前均要有确定的图纸和模型。包含两个或两个以上组件的产品就需要装配。完成一个复杂产品的装配需要大量的时间,若进行家族化系列产品开发或者设计变更,繁琐和重复的工作使装配设计的效率很难提高。CATIA V5作为一款三维设计软件,部件装配是其最基本的也是最具优势和特色的功能模块,包括创建装配体,添加指定的部件或零件到装配体,创建部件间的装配关系,移动和布置装配成员,生成产品的爆炸图,装配干涉和间隙分析等主要功能,其强大的建模能力,可以多种模块融合,具有扩展和二次开发的功能,被应用在机械、电子、汽车、航空等领域,成为当今主流的三维开发工具[1-3]。
1 Framework方法装配的原理
目前装配技术的主要研究方向:装配的设计DFA、快速设计、装配的约束方式、装配顺序、装配路径规划等[4-6]。CAD平台中的装配方法很多,Framework方法是以快速装配为指导思想,在CATIA V5的数据结构中,利用轴线(Axis)、定位面(Position Plane)和旋转面(Rotation Plane)3种几何特征为骨骼构建出产品装配的整体框架,并定义该框架为Framework,通过单一的约束指令,重合约束(Coincidence)将所有的组件如同摆放展品一样,放置在预先构建的Framework上,配合约束实现装配。复杂产品的装配分为N级装配,即一个主装配(TOP Assembly)和N个次级装配(SUB Assembly)。主装配需要一个整体的Framework(MASTER Framework),而次级装配需要局部的Framework(SUB Framework)。利用局部的Framework完成次级装配,并将该次级装配作为一个组件,装配到整体的Framework上,因此,需要创建多个Framework,分主次级进行装配,如图1所示。
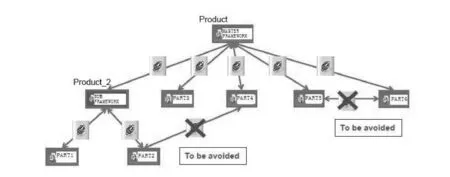
图1 Framework法装配规则图
Framework定义的各个组件的位置不因组件的改变和缺失而改变,如果需要改换的部件位置发生变化,那就需要更改Framework中定义的几何特征,并进行框架的局部修改。在需要改换的部件位置不变的情况下只需通过CATIA V5的组件替换命令和修改重合约束对象的命令即可,从而实现快速装配。但Framework方法的使用要遵循以下的规则:第一,MAST ER Framework必须经过严格的设计和优化。第二,必须保证SUB Framework在MASTER Framework中的定位。第三,每个组件均包含在Framework中,并有定位。第四,装配所需约束仅以重合约束的单一形式出现。
2 Framework装配的实现方式
2.1 产品组件装配特征定义
运用Framework方法,首先要考虑各个组件的装配特征。运用CATIA V5装配模块中Publication命令将组建预先定义的3个几何特征发布出来,待装配使用,所有的组件统一用Axis,Position plane和Rota plane定义几何特征。几何特征的名称以方便辨别为原则自行定义,几何特征通常利用两个平面和一个轴线定义,也有利用一个位置平面和两根轴线定义,下面以LINK和BOLT为例,介绍各个组件的装配特征,如图2所示。
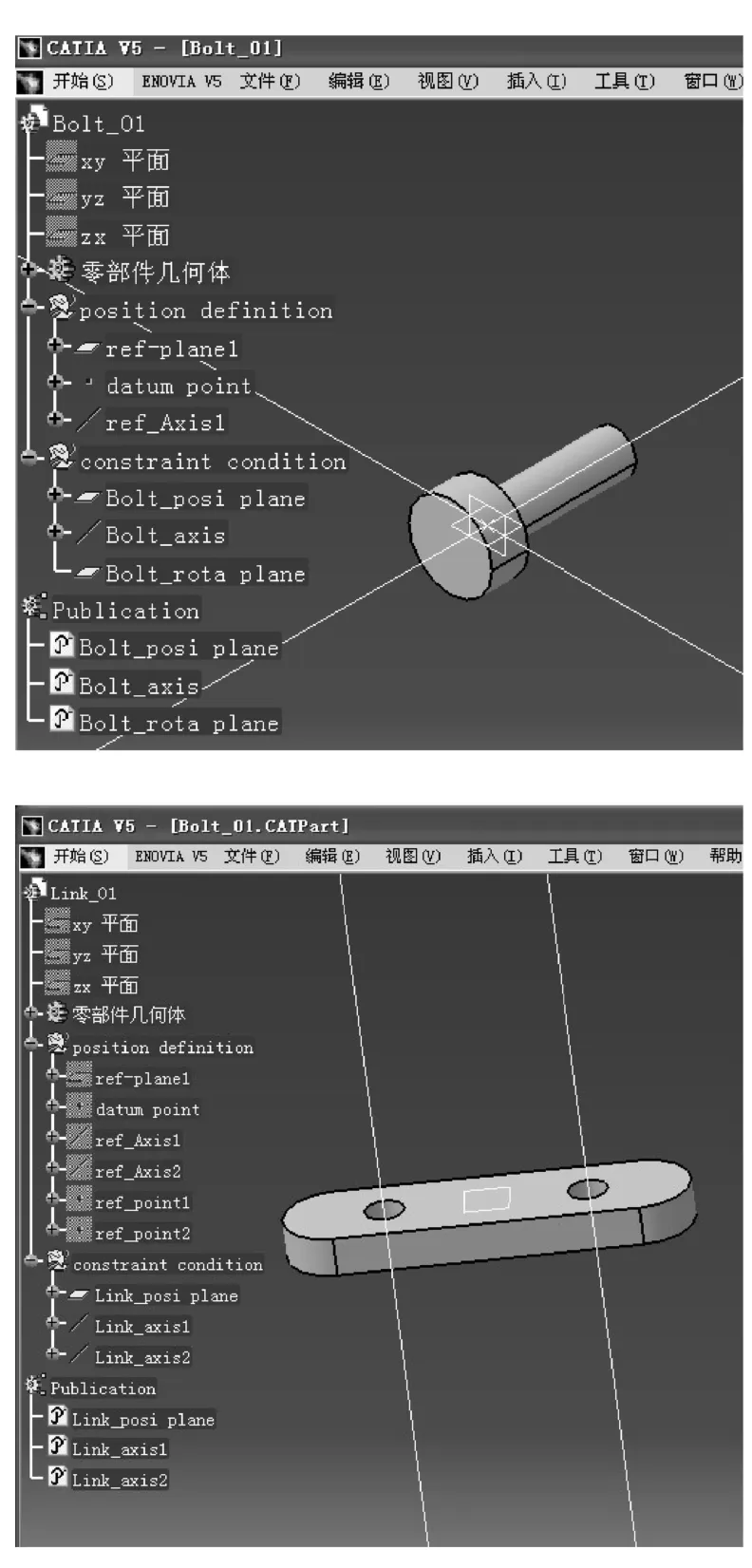
图2 产品组件两种装配特征定义
图2中BOLT和LINK需要定义的装配特征均被列在constraint condition的几何图集中,其中,BOLT的position plane,rotation plane,axis和LINK的position plane、两条axis通过publication命令被发布出来,供以后的装配使用[7]。
2.2 装配组件的具体方法
以LINK ASSY为例进行装配,首先要创建MASTER Framework,这需要2D的装配图指导,如图3所示。
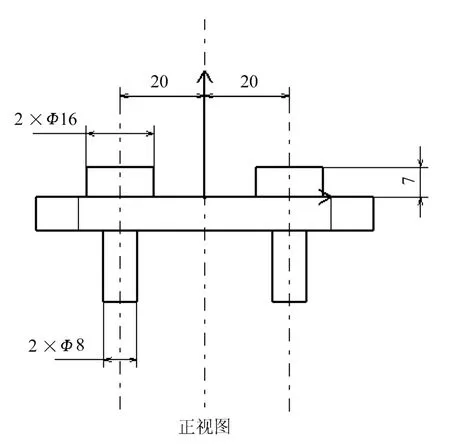
图3 LINK ASSY的2D装配图
建立的方法是在CATIA中新建一个PART,将名称定义为MASTER Framework,然后通过点线面等几何特征及2D图上标明的各个组件具体位置来创建整体的Framework(MAST ER Framework),如图4所示。
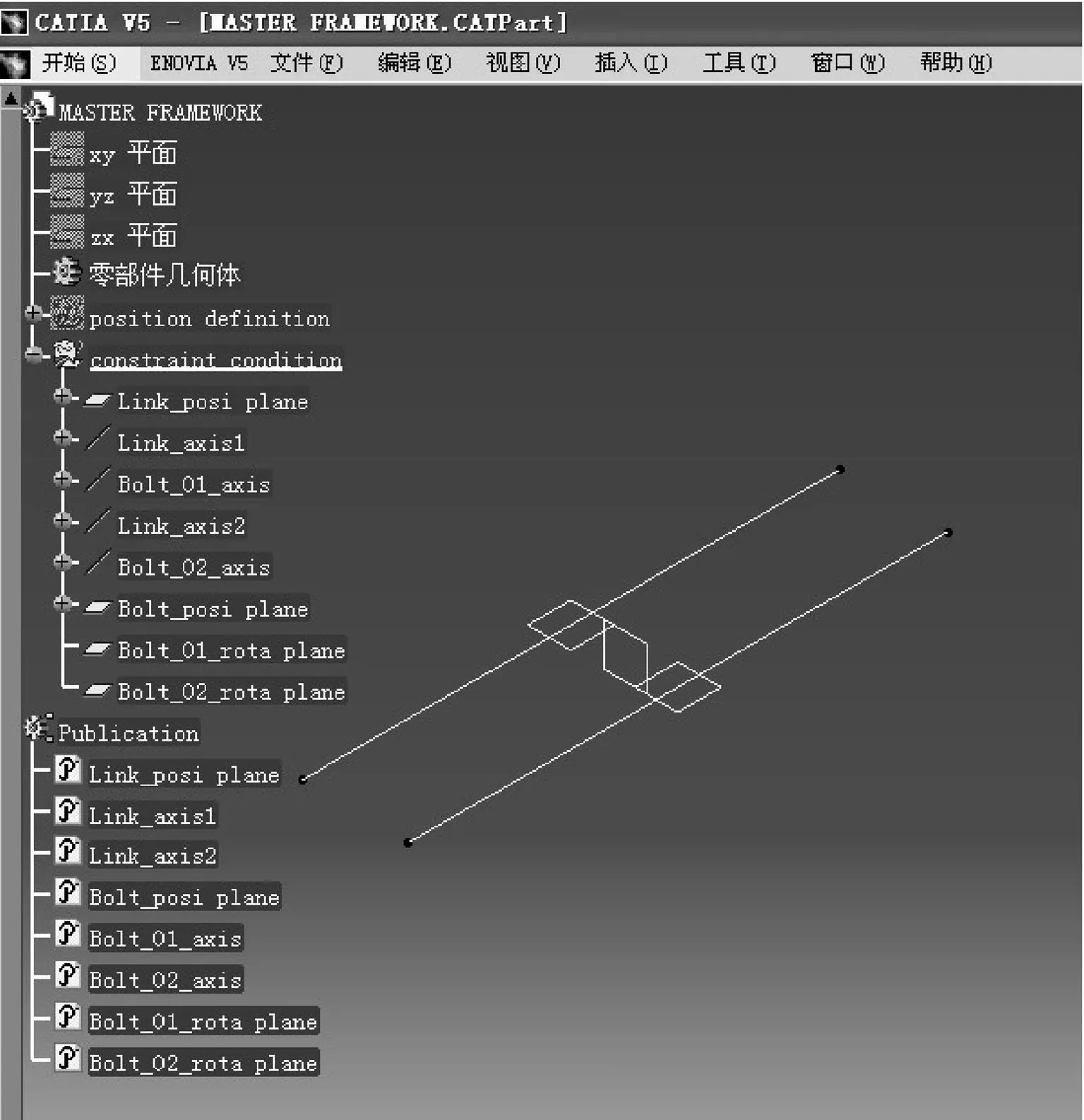
图4 整体的Framework(MASTER Framework)
在LINK ASSY的2D图中确定了BOLT和LINK的相对位置,将3个组件的position plane设置为同一平面。BOLT作为一个回转体,需要旋转面约束其旋转角度,由于该例中的BOLT是沿轴线完全对称的,所以没确定具体的旋转角度,其装配轴线分列两边。LINK的两轴线和两个BOLT的轴线是同一轴线。如此建立MASTER Framework。
定义完装配特征的各个组件如图5所示。
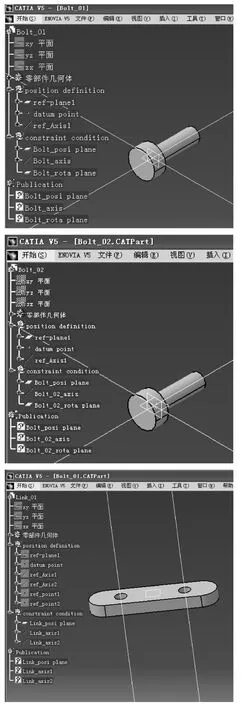
图5 定义完装配特征的各个组件
将定义完装配特征的各个组件和MASTER Framework一并插入到Production中,通过MASTER Framework中几何参数和各个组件的几何参数相匹配,先对MASTER Framework进行固定组件约束,然后利用重合约束(Coincidence)完成装配设计,如图6所示。
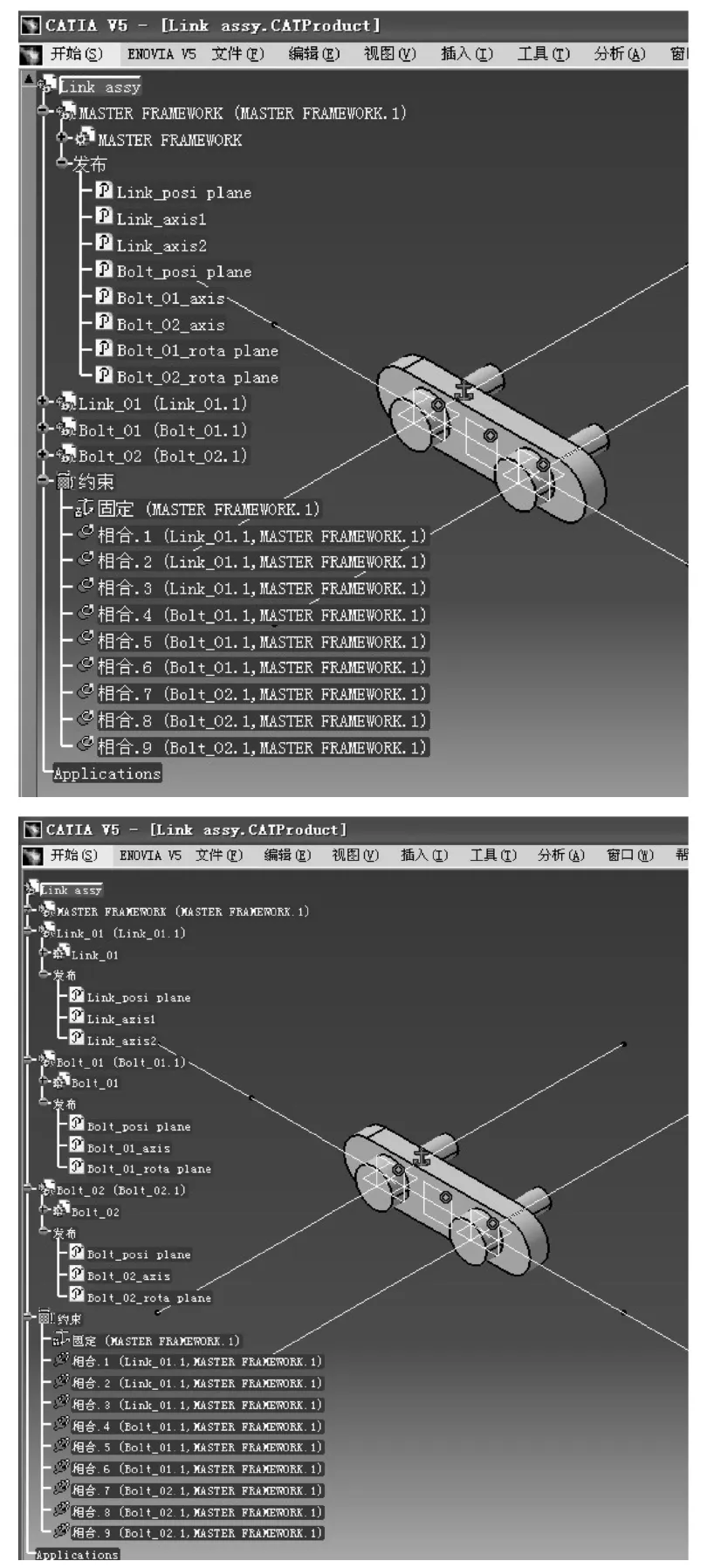
图6 利用Framework装配结果
将每个组件中发布的3个几何特征和MAST ER Framework中发布的几何特征对应起来,用重合约束(Coincidence)进行装配,刷新后完成装配任务[8]。
3 结 语
Framework方法对于单一型号的简单产品,其装配速度优势可能不明显,但对于设计变更和开发家族化系列产品时,其重复利用率高,避免了重复装配设计,缩短了工作时间,提高了装配设计的效率。该方法可用于机械、汽车、航天等领域。其进一步的研究工作将从组件装配特征定义方式的标准化和优化Framework创建方法着手,使装配设计更加快速化、合理化、智能化。
[1] 李 原,彭培林,邵 毅,等.基于CATIA标准件库设计与实现[J].计算机辅助设计和图形学学报,2005,17(8):1873-1877.
[2] 潘志毅.基于特征联系的CAD快速建模[D]:[硕士学位论文].南京:南京航空航天大学,2005.
[3] Lee H R,Gemmill D D.Improvedmethodsofassembly sequence determination for automatic assembly systems[J].European Journal of Operational Research,2001,131:611-621.
[4] 冯毅雄,谭建荣,伊国栋,等.基于符号的装配建模方法研究[J].计算机辅助设计与图形学学报,2003,15(6):673-679.
[5] Gardan Y,Minich C.Feature-based models for CAD/CAM and their limits[J].Computers in Industry,1993,23:3-13.
[6] 刘春阳,勾志践.六方体机械方向调节机构的设计与应用[J].长春工业大学学报:自然科学版,2007,28(1):118-120.
[7] 邓冬梅,周来永,陈 功,等.基于CATIA的组件库建库工具的设计与实现[J].华南理工大学学报:自然科学版,2007,35(1):138-141.
[8] 张灶法,王 飞,吴义忠.支持产品快速设计的可重用组件库的研究与开发[J].机械设计,2003,20(13):56-58.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
福建质量管理(2019年6期)2019-04-02
制造技术与机床(2018年9期)2018-09-19
海外华文教育(2017年6期)2017-08-07
电子制作(2017年10期)2017-04-18
电测与仪表(2015年10期)2015-04-09
电气技术(2013年2期)2013-09-22
电子设计工程(2012年22期)2012-09-26
