
基于AD8361无线传感器网络节点的测距电路设计
2010-07-09 01:40田润澜王剑平金福禄
长春工业大学学报 2010年1期
田润澜, 王剑平, 金福禄
(空军航空大学航空电子工程系,吉林长春 130022)
0 引 言
无线传感器网络(Wireless Sensor Networks,WSN)综合了传感技术、无线通信技术和分布式信息处理技术等,通过各类集成化的微型传感器相互协作,实时、全方位地监测被测对象,感知的信息可由自组织的无线通信网络以多跳中继的方式传送到监控中心。
应用无线传感器网络实现节点定位有多种定位方式,通常采用GPS进行节点定位。但在一些特定环境下,比如地下矿井等特殊领域[1],由于无法接收到GPS信号,所以一般改用网络节点自定位技术[2]。
节点自定位技术通常应用无线发射器,以广播方式广播自身坐标信息,网络中的其它节点依据这些信息和通信链路计算自身的坐标。根据定位算法使用的信息种类,可将节点定位算法分为两类:测距算法和免测距算法。
免测距算法对于某些应用来说,它存在精度不高、浪费系统资源过多的缺点,故常采用测距算法。测距方法中应用较为广泛的是RSSI(Received Signal Strength Index)算法。RSSI算法通过测量接收信号强度获得测距信息,被广泛用于商业化定位系统。文中通过应用AD8361芯片,进行无线传感器网络中的节点测距的电路设计,为采用RSSI算法实现节点定位提供测距数据支持。该定位技术具有成本低、占用系统硬件资源空间较少等优点[3]。
1 电路设计
无线网络节点具有无线通信能力,利用自身携带的无线数传模块与周围相邻模块在无线电信号覆盖有效范围内进行可靠的数据通信[4];节点能够在移动后具有重新构筑通信链路的能力。一般的应用场合使用GPS进行节点定位[5],但在一些特殊的应用领域,由于环境限制无法接收GPS信号,而不具有定位能力。
文中提出应用节点间的测距原理,通过设计测距电路,实现相邻节点间的测距。
1.1 测距原理
在无线传感器网络系统中,需要确定两节点之间距离。对于任意一个节点,如果已知发射功率,相对应的接收节点处可接收信号,并对信号的强度进行测量,再应用理论或经验的信号传播模型,将传播损耗转化为距离。例如在自由空间,距发射机d处的天线接收到的信号强度由下面的公式给出[6]:
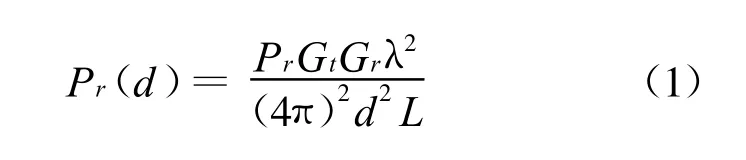
式中:Pr发射机功率;
Pr(d)
距离d处的接收功率;
Gt,Gr分别是发射天线和接收天线的增益;
由式(1)可知,在自由空间中,接收机功率随发射机与接收机距离的平方衰减。这样,通过测量接收信号的强度,再利用式(1)就能计算出任意对应的收发节点间的距离。
1.2 节点的结构设计
在无线网络中,节点要实现通信需要控制模块、通信模块、传感器组等。为了实现非GPS节点定位[7],还需要具有测距电路。其整体模块结构如图1所示。
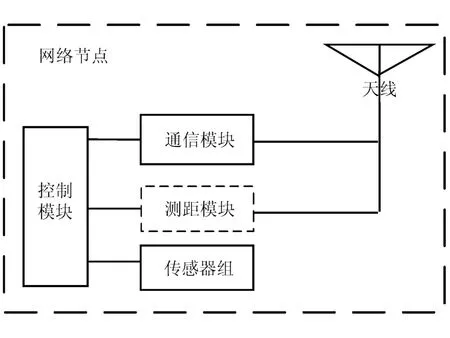
图1 网络节点模块组成
网络节点模块中的控制模块、通信模块和传感器组与通常的网络节点设计方法基本一致[8]。对于无线传感器网络的节点定位应用,用测距模块与控制模块的组合应用代替了GPS模块的功能。
测距模块系统由两个子模块组成,如图2所示。

图2 测距模块框图
1.2.1 功率测量模块的设计
在无线传感器网络系统中,节点间的距离不断变化,发射功率较低,故射频输入端的输入信号动态范围变化较大。因此,需要选用在较大的动态范围内仍能保持良好的输入输出线性关系。同时,要求模块能够适应在不同温度环境下保持稳定。针对这些特点和要求,选用相对价格低廉、功耗低的AD8361芯片。
AD8361的内部电容并联在一个内部电阻上,该电阻的阻值随输入信号强弱变化而变化,变化范围从弱信号的2 kΩ到强信号的500 Ω,能够保证在输入信号动态范围较大的情况下仍能保持良好的线性输出。其低通角频率在3~12 MHz之间,因此,满足本节点模块中的240 MHz信号的使用。不同频率下输入与输出的转换关系如图3所示。
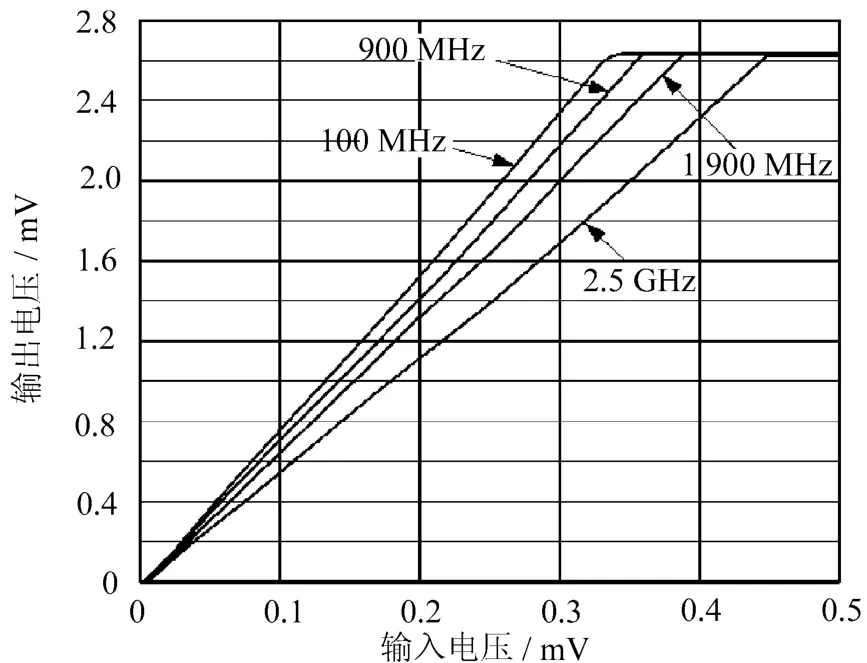
图3 测距电路输入输出转换图
功率测量模块的电路设计如图4所示。
电路中应用2.7~5.5 V范围内的单电源供电,VPOS引脚外接两个去耦电容。外部分流电阻结合交流耦合输入可获得将近50 Ω的总宽带输入阻抗。设计中耦合电容置于外部分流电阻和RFIN端之间。通过耦合电容和内部输入电阻,可得到高通角频率。3种不同的工作模式可由SREF和IREF引脚设定。
AD8361在内部参考模式和电源参考模式下,降低供电电压也会引起动态范围的减小,而频率的变化几乎不影响动态范围,但在高频时转换增益稍有下降。
该电路具有高度的线性和温度稳定性,测量准确度为14 dB范围内误差±0.25 dB;23 dB范围内误差±1 dB。该电路最典型的应用是发射功率控制和接收信号强度检测(RSSIs)。它的频响范围为0.1~2.5 GHz;供电电压范围为2.7~5.5 V,4 mA;输入范围为30 dB。同时,该电路具有低功耗、体积小巧等特点,可嵌入到各种便携设备中。
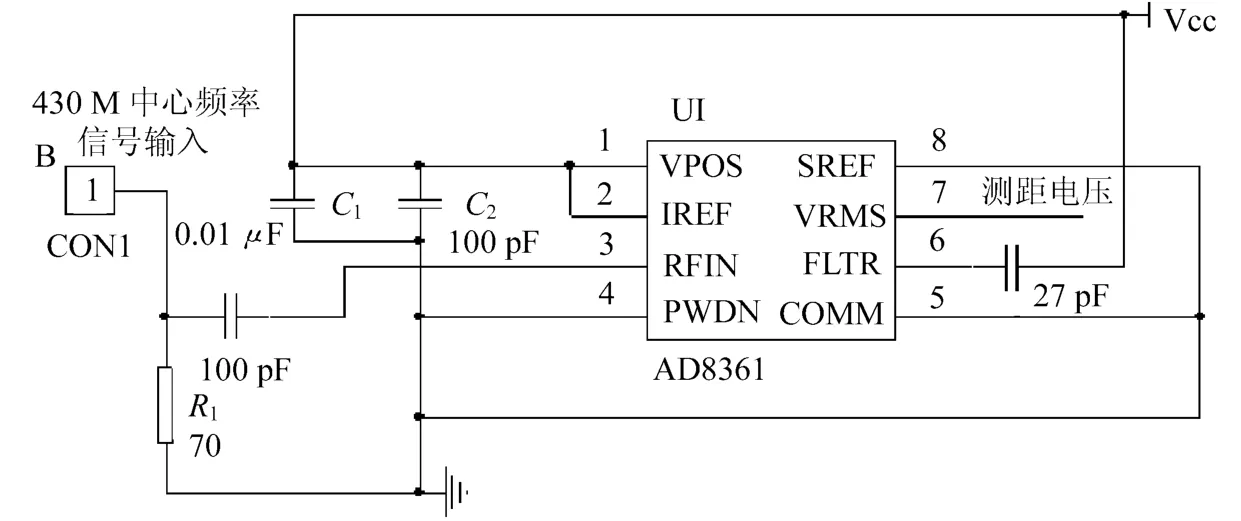
图4 测距电路
1.2.2 测距信号放大模块
由测距模块电路输出的测距信号比较微弱,在A/D转换前应该进行充分放大。常规情况下,发射模块的发射功率为10 mW,如果节点距离在10~300 m范围内变化,放大器的增益需要达到50或100,才能够实现正常的A/D转换。
可选的测距信号放大器的类型很多,文中采用的是典型的差动放大器(电路见图3)。采用差动输入的三运放形式,电路由集成运放芯片TL084和外围电阻、电容构成。其增益可通过滑动变阻器来调节。该放大电路有较高的抑制共模干扰能力。放大后的测距信号送主控板进行A/D变换,再进行进一步的处理。
2 实验与结论
2.1 实验数据

表1 节点距离测试(单位:m)
2.2 实验数据分析
采用激光测距仪测得实际数据误差很小,最大测量误差为0.225%,最小测量误差为0.1%,平均误差为0.144%。误差见表2。
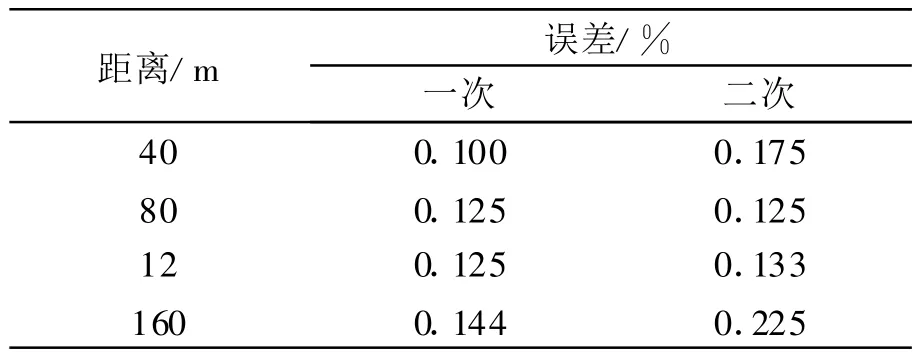
表2 激光测距仪测得数据误差
在本次研究中,这样的误差可以忽略,能够满足实际需要。所以,可以用激光测距仪测得数据为基准实际数据。
采用GPS定位测距测得数据误差也较小,最大测量误差为1.28%,最小测量误差为1.15%,平均误差为1.21%。误差见表3。
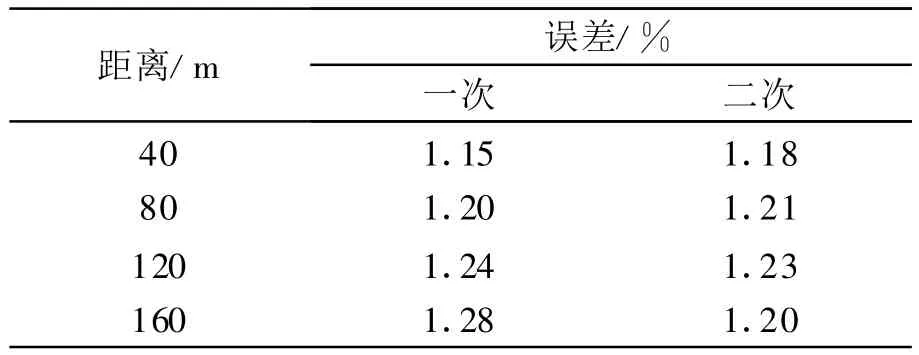
表3 GPS定位测距测得数据误差
可以看出,GPS定位测距的精度也较高。
采用节点定位测距测得数据误差也小,最大测量误差为2.9%,最小测量误差为1.97%,平均误差为2.44%。误差见表3。
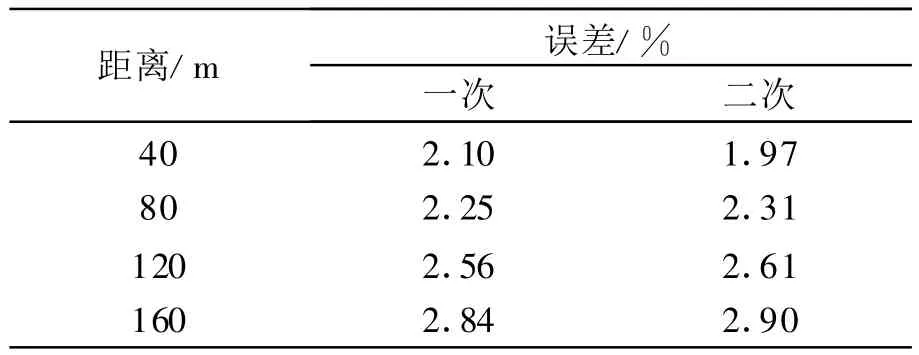
表4 节点定位测距测得数据误差
可以看出,节点定位测距的测量精度有所降低。但在实际生产生活应用中已完全能够满足精度要求。比如,在煤矿井下特定的环境中,测距范围在150 m以内,定位精度在误差4.3 m以内,这已经能够满足煤井下作业的需要。
2.3 节点定位法测距对定位精度的影响因素
应用节点定位法测距,对定位精度可以产生的影响有如下几个方面:
(1)发射模块功率漂移影响。由于发射模块的功率随外部条件变化会产生漂移,使得测距精度产生误差。
(2)电磁干扰的影响。由于系统采用的是信号强度测量法测距,而各种电子设备会辐射出电磁干扰,虽然可以采用无源带通滤波器来进行干扰抑制,但仍不能保证将进入测距通道的干扰完全排除,因此也可产生误差。
3 结 语
经过研究和试验对比,文中设计的应用于某些特定环境的无线传感器网络非GPS定位系统,利用AD8361设计节点测距模块,测量出的距离值可以满足节点定位算法的需要,实现定位。本系统具有精度高、成本低、适用于GPS受限的特殊环境中,具有广阔的应用前景和市场空间。
[1] 孙继平,李继生,雷淑英.煤矿井下无线通信传输信号最佳频率选择[J].辽宁工程技术大学学报,2005(6):378-380.
[2] Neal Patwari,Alfred O,Hero III,et al.Relative location estimation in wireless sensor networks[J].IEEE T ransactions on Signal Processing,2003,51(8):2137-2148.
[3] 孙学斌,王汇源,周 正.自组网中节点位置推测算法的研究[J].山东大学学报:工学版,2003,34(3):55-59.
[4] Meguerdichian S,Koushanfar F,Potkonjak M,et al.Coverage problems in wireless ad-hoc sensor networks[C].//Proc.of the IEEE INFOCOM.Anchorage:IEEE Computer and Communications Societies,2001(3):1380-1387.
[5] Niculescu D,Nath B.Ad hoc positioning system[C].//Conference Record of IEEE Global Telecommunications Conference,GLOBECOM'2001,Vol 5.San Antonio(TX,USA),2001.Piscataway(NJ,USA):IEEE,2001:2926-2931.
[6] 史 龙,王福钓,段渭军,等.无线传感器网络Range-Free自身定位机制与算法[J].计算机工程与应用,2004,40(23):127-13,151.
[7] 徐 钊,王珠玲.煤矿井下传感器网络的研究[J].工矿自动化,2004,23(1):110-114.
[8] 张大踪,杨 涛,魏东梅.无线传感器网络低功耗设计综述[J].传感器与微系统,2006(5):132-136.
猜你喜欢
无线互联科技(2021年4期)2021-04-21
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
知识经济·中国直销(2018年3期)2018-04-12
电子制作(2017年7期)2017-06-05
电子制作(2016年15期)2017-01-15
学习月刊(2015年1期)2015-07-11
