
无人作战飞机空战自主机动决策研究
2010-07-04 11:28周德云
电光与控制 2010年8期
郭 昊, 周德云, 张 堃
(西北工业大学,西安 710072)
0 引言
目前,无人机已成为航空技术的重要发展方向,无人作战飞机更是处于研究的前沿。随着航电火控技术、通信与导航技术和先进制导武器的发展,无人作战飞机将逐步承担起包括综合打击、对地火力压制等作战任务,甚至参与制空权的夺取。能够在复杂的空战环境下进行自主空战决策是无人作战飞机进行空战的关键技术之一。在空战最为激烈的机动攻击阶段,无人作战飞机应根据空战态势及时抢占并保持有利位置,寻机歼敌,保全自己。自主机动决策是自主空战决策的核心内容。在空战过程中,交战双方是一个动态的对抗过程,机动策略的选择具有主动性、目的性和风险性[1]。目前,对机动策略的研究常用的方法有微分对策法、矩阵对策法、人工智能法等[2],但这些方法都未考虑决策过程的风险性。本文以对策论为基础,研究基于风险型决策的空战自主机动策略,并对不同条件下的实例进行仿真。
1 空战自主机动决策模型
在一对一空战机动攻击阶段,交战双方的对抗过程可以看作是一个有限二人零和对策过程。根据对策论的知识,构建空战机动攻击阶段的对策模型。模型包括局中人、策略集和支付等3个要素。
局中人为我方攻击机和敌方目标机。策略集以常用空战操纵方式为基础,进而设计提出的7种基本机动方式[3-4],包括最大加速、最大减速、最大过载爬升、最大过载俯冲、最大过载右转、最大过载左转、保持稳定飞行。通过实时进行机动选择,可由此7种机动方式组合出多种机动动作。在交战双方策略集选定以后,就可构造出我方攻击机的支付矩阵:
Sij为针对目标机执行第j种机动策略,攻击机选择第i种机动策略与之进行对抗时,攻击机的赢得值。赢得值越大,表示攻击机优势越大,损失越小,目标机优势越小,损失越大。
2 空战态势评估函数
支付矩阵中的赢得值是以空战态势为依据,通过依次分别预测一段时间后,交战双方执行7种机动方式所达到的状态,并计算各状态的评估函数来实现[5]。本文采用的空战态势评估函数主要由交战双方的角度、距离、接近速度、相对高度及武器性能等因素决定。
2.1 角度跟踪优势函数
角度跟踪优势函数为

式中:qR为攻击机R速度矢量与目标线夹角;qB为目标机B速度矢量与目标线夹角。
2.2 接近速度优势函数
接近速度优势函数为

式中:Vc为攻击机R与目标机B的接近速度。
2.3 高度优势函数
高度优势函数为
式中:h为攻击机与目标机的相对高度差;hX为门限高度差,其值随空战形式的不同而变化,可由决策者根据经验设定;σhX=1.2hX。
2.4 攻击优势函数
现代空战武器主要以各型空空导弹为主,对于全向空空导弹来讲,在目标周围存在一可攻击区,只有攻击机进入该区内,且目标机处于攻击机有效截获区时方可进行攻击[6],即攻击机应满足:
式中:νR为目标方位角;μR为目标俯仰角;Δφs为攻击机雷达水平扫描范围;Δφc为攻击机雷达垂直扫描范围;Rmin,Rmax为导弹最小允许发射距离和最大允许发射距离;Dmin,Dmax为雷达最小截获距离和最大截获距离。一般总有Rmax<Dmax,Rmin>Dmin,因而只需满足式(5)的前两式即可。当相对距离r>>Rmax时,攻击机R远离目标机B的攻击区,可以认为距离优势很小;当r逐渐减小,从而靠近 Rmax时,距离优势随之增大;当Rmin≤r≤Rmax时,R机处于B机的可攻击区内,可认为距离优势很大;当r进一步减小,使得r<Rmin时,R机出了B机的可攻击区,距离优势减小。因此,构造距离优势函数:

式中:R0=(Rmax+Rmin)/2;σr=2(Rmax-Rmin)。
同理可构造截获优势函数:

式中:σs=2.5Δφs;σc=2.5Δφc。从而,可定义攻击优势函数:

2.5 总的态势评估函数
空战态势评估函数是决策者选择机动策略的依据,不同的空战形式,影响空战态势的因素有所不同。在近距格斗中,空战双方对抗激烈,机动转换迅速,机动目的以摆脱敌方瞄准跟踪、抢占有利攻击位置为主,决策者应综合考虑角度、距离、接近速度、高度及武器性能等对空战态势的影响。与近距格斗相比,在超视距空战中,交战双方大都在彼此的前半球进行对射攻击,机动目的以保持对敌方的瞄准跟踪、调整姿态满足武器发射条件为主,这在一定程度上限制了彼此的角度优势的大小,因此决策者需着重考虑距离、高度和武器性能的影响。综合考虑交战双方的角度、距离、接近速度、相对高度、武器性能以及空战形式等因素,则攻击机和目标机分别采取第i种机动和第j种机动进行对抗后的总的空战态势评估函数,即攻击机的赢得值为

式中:w1,w2,w3为各优势函数的权重,其值可根据当前空战形式以及决策者的经验、偏好确定。计算得到赢得值后,就可构造攻击机支付矩阵S。
3 基于风险型决策的自主机动策略
空战是一种在冲突环境下的激烈对抗过程,机动策略的选择通常采用对策论方法,以找出“稳定解”或“平衡解”。这样的结果比较保守,本文将冲突局势下的双边对策问题,转变为单边风险决策问题,并通过模糊决策方法对其进行分析求解,找出最优对抗策略。
3.1 风险型决策矩阵
风险型决策是指决策者在决策环境不是完全确定,但对各个状态发生的概率已知的情况下所作出的决策[7]。能否准确预测当前时刻交战双方执行各种机动策略的概率是影响机动决策有效性的关键因素之一。本文通过在每一决策时刻依次分别预测一段时间后交战双方执行7种机动策略所达到的状态,确定当前时刻交战双方执行各种机动策略的概率。
设 ΓR=(r1,r2,…,r7)为攻击机R 的机动策略集,ΓB=(b1,b2,…,b7)为目标机 B 的机动策略集,根据第1、第2节的分析,可确定攻击机R对目标机B的机动对策矩阵 S=(sij)7×7。
设Y=(y1,y2,…,y7)为攻击机R采取7种机动策略的概率向量,则有:
式中:i=1,2,…,7。
同理,设X=(x1,x2,…,x7)为目标机 B采取7种机动策略的概率向量,则有:
式中:j=1,2,…,7。
根据{S,Y},可建立攻击机R对目标机B的风险型机动决策矩阵[8]:
式中:yisij,i,j=1,2,…,7 为针对目标机执行第 j种机动策略,攻击机选择第i种机动策略与之进行对抗时,攻击机所得的风险收益。
3.2 风险型决策方法
在建立攻击机R对目标机B的风险型机动决策矩阵 A=(aij)7×7的基础上,令:

式中:j=1,2,…,7。定义相对偏差为

于是得到由相对偏差值构成的模糊决策矩阵Δ=(μij)7×7,采用最大隶属度偏差法[9]可确定攻击机 R 执行各种机动策略的相对风险收益值为

式中:bj=(μij)。攻击机 R 的最优机动策略应满足:

则攻击机R的最优机动策略为ri*。
4 决策触发器
决策时机的确定是能否有效进行机动决策的关键因素之一。为了提高机动决策的快速性及有效性,决策触发器采用决策触发机制,决策时机根据空战实际情况确定。在决策触发器中设置一些条件,在每个采样周期都对这些条件进行判断,若有条件满足则触发一次决策[10],决策触发条件如下所述。
1)初始决策时刻。在空战开始时刻,即t=t0时,应触发第一次决策。
2)战术终止时刻。每次决策都对未来一段时间内的空战过程进行预测,以此为基础进行机动决策。因此,一次决策的有效期就是其最优空战过程的时间跨度。若实际的空战过程与上一次决策时预测的最优过程基本一致,则应在该最优过程的终止时刻t=tk时触发新的一次决策,tk=tk-1+ ΔT。其中:tk-1为上一次决策时刻;ΔT为最优空战过程的时间跨度,即空战过程预测时间。ΔT=KΔtf,Δtf为空战积分步长,K为预测时间间隔数。根据专家经验,K主要依赖于攻击机速度矢量与目标线的夹角ω以及攻击机与目标机距离r的变化而确定[11-12],三者之间关系如图1所示,图中,Kc为K 的上限,ωd=0.2ωc,ωc决定曲线 K(ω)的拐点,其值可按曲线ωc(r/Rm)确定,Rm为武器作用范围,ωe的值可由经验确定。
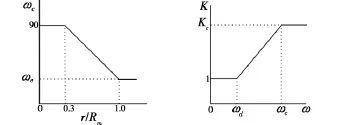
图1 预测时间间隔数K示意图Fig.1 Time predicting interval K
3)本方局势危急或决策失误。若空战过程中本机高度过低、速度过低、空战状态非常不利,或实际空战态势与最近一次决策的预测结果发生显著偏差,则此时不能再采用上一次的决策结果,应触发新一次决策以便及时改出。在t时刻,若满足以下条件之一则触发决策:

式中:S(t)为空战态势评估函数值;Hmin,Vmin及Smin为高度、速度和S(t)的阈值;S^(t)为最近一次决策中对S(t)的预测值,ΔS为阈值。
决策触发机制充分考虑了空战态势变化的快速性及不可预见性,能够根据空战实际情况灵活选择决策时机,提高了机动决策的快速性及有效性。
5 仿真分析
设攻击机为A,目标机为T,A,T机最大可用过载均为7g。仿真采用北-天-东坐标系。
1)近距(WVR)决策仿真。A机初始位置(单位:m):(1 000,5 200,2 000)。T 机初始位置(单位:m):(6 700,4 500,5 300)。A 机初始速度 VA=280 m/s,初始航迹俯仰角θA=0°,初始航迹偏转角φA=0°。T机初始速度VT=310 m/s,初始航迹俯仰角θT=9°,初始航迹偏转角φT=45°。
双方在120 s中的机动对抗情况如图2、图3所示。

图2 A,T机近距对抗轨迹Fig.2 The trajectory of aircrafts in WVR combat

图3 A,T机近距对抗机动决策结果Fig.3 The maneuvering decision-making of aircrafts in WVR combat
2)超视距(BVR)决策仿真。A机初始位置(单位:m):(1 000,2 500,2 000)。T机初始位置(单位:m):(36 000,4 500,34 300)。A 机初始速度 VA=450 m/s,初始航迹俯仰角 θA=0°,初始航迹偏转角φA=0°。T机初始速度VT=420 m/s,初始航迹俯仰角θT=0°,初始航迹偏转角 φT=270°。
双方在25 s中的机动对抗情况如图4、图5所示。

图4 A,T机超视距对抗轨迹Fig.4 The trajectory of aircrafts in BVR combat

图5 A,T机超视距对抗机动决策结果Fig.5 The maneuvering decision-making of aircrafts in BVR combat
3)仿真结果分析。图2描述了近距对抗过程中A,T机的飞行轨迹,图3中的纵坐标表示A,T机的机动策略号,其值依次对应于第1节中的7种基本机动方式,它分别描述了近距对抗过程中A,T机在每一时刻所执行的机动策略。由图2、图3可以看出,在空战初始时刻,A机在速度上并不占优。在空战的前10 s,A机不断调整速度以增大本机总体优势,T机由于A机的机动对其现有的优势影响不大,因此保持向左盘旋上升以增大角度及高度优势。在第11 s时,由于A机相对于T机的角度优势降低,因此A机采取水平向右盘旋以摆脱T机的跟踪瞄准,T机则相应地采取向右盘旋上升,试图进入A机尾后上方区域,以获得有利的攻击位置。在第43 s时,A机加速跃升以降低T机的高度优势,T机则继续向右盘旋上升,以保持对A机的跟踪。由此可以看出,在近距情况下,交战双方对空战态势变化敏感,能够及时根据空战态势及敌方机动动作的转换,相应地改变机动策略,以摆脱敌方的跟踪瞄准,并抢占有利的攻击位置。
图4描述了超视距对抗过程中A,T机的飞行轨迹,图5分别描述了超视距对抗过程中A,T机在每一时刻所执行的机动策略。由图4、图5可以看出,在空战的前15 s,A机向右转弯,加速跃升,在保持对T机截获跟踪的情况下,增大高度优势;T机则水平右转盘旋以实现对A机的截获跟踪。在15~25 s,T机不断调整方位角,以保持对A机的跟踪;A机则不断调整本机的速度、姿态,完成对T机的跟踪瞄准。由此可以看出,与近距格斗相比,在超视距情况下,交战双方相距较远,空战方式以迎头对攻为主,空战态势变化平缓,交战双方对敌方机动动作的敏感程度降低,机动动作的转换主要以满足中距武器发射条件为主。
6 结束语
空战机动对抗是一个复杂的、动态的过程,影响机动动作选择的因素很多。本文通过对空战机动方式的分析,以对策论为基础,将空战态势作为预测机动策略概率的依据,提出了一种基于风险型决策的空战自主机动决策算法,并在不同的条件下,对空战机动攻击阶段的自主机动决策进行了仿真。仿真结果符合空战实际情况,较好地体现了空战过程的对抗性,机动决策的主动性、目的性和风险性。对无人机空战自主机动决策具有一定参考价值。
[1]刘昌云,刘进忙,陈长兴.基于风险型决策的目标机动策略研究[J].系统工程理论与实践,2003(10):99-102.
[2]董彦非,郭基联,张恒喜.空战机动决策方法研究[J].火力与指挥控制,2002,27(2):75-78.
[3]钟友武,柳嘉润,杨凌宇,等.自主近距空战中机动动作库及其综合控制系统[J].航空学报,2008,29(增):114-121.
[4]HERBST W B.Dynamics of air combat[J].Aircraft,1982,20(7):594-598.
[5]吴云洁,宋立国,姜玉宪.飞行综合控制系统空战决策方法[J].北京航空航天大学学报,1999,25(3):272-274.
[6]周德云,李锋,蒲小勃,等.基于遗传算法的飞机战术飞行动作决策[J].西北工业大学学报,2002,20(1):109-112.
[7]运筹学教材编写组.运筹学[M].3版.北京:清华大学出版社,2005.
[8]罗小明.C3I系统攻防对抗作战决策的建模及仿真研究[J].指挥技术学院学报,2001(1):54-56.
[9]李登峰.模糊多目标多人决策与对策[M].北京:国防工业出版社,2003.
[10]柳嘉润,钟友武,张磊,等.自主空战决策的试探机动方法及仿真研究[J].系统仿真学报,2008,20(5):1238-1242.
[11]王芳,姜长生.基于风险型决策的多目标空战机动策略研究[J].电光与控制,2008,15(12):21-26.
[12]AUSTIN F,CARBONE G,FALCO M,et al.Game theory for automated maneuvering during air-to-air combat[J].J Guidance,1990,13(6):1143-1149.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
装备制造技术(2020年3期)2020-12-25
小学生学习指导·小军迷联盟(2019年2期)2019-09-10
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
军营文化天地(2017年6期)2017-06-28
百科探秘·航空航天(2015年10期)2015-11-07
百科探秘·航空航天(2015年4期)2015-11-07
航空知识(2000年8期)2000-06-07
军事历史(1999年3期)1999-08-20
