
电磁操动机构的电磁缓冲仿真实验研究
2010-06-04 05:35:44郭凤仪王智勇李春光王继强王喜利
电工电能新技术 2010年3期
郭凤仪,李 朋,李 斌,王智勇,李春光,王继强,王喜利
(辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛 125105)
电磁操动机构的电磁缓冲仿真实验研究
郭凤仪,李 朋,李 斌,王智勇,李春光,王继强,王喜利
(辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛 125105)
为弥补弹簧缓冲的不足,提出一种适用于电磁操动机构合闸过程的电磁缓冲控制思想。在触头合闸运动中对通过缓冲线圈施加反向激磁电流,利用反向电磁力来相对减小合闸吸力,从而降低机械冲击、减少触头弹跳、实现合闸缓冲。采用ANSYS三维矢量分析法,针对不同缓冲电流以及不同缓冲位置时电磁操动机构的合闸吸力特性进行了仿真计算;利用实验装置对不同缓冲控制条件下的触头振动情况进行了实验研究。初步研究表明,缓冲电流的大小以及缓冲电流的施加位置、施加时间对电磁操动机构的吸力特性具有重要影响,只有综合考虑这三种因素、选择合适的控制条件才能得到较为理想的合闸特性和缓冲效果。电磁缓冲控制对于其它操动机构中存在的合闸冲击问题也具有一定的借鉴意义。
电磁缓冲;电磁操动机构;反向激磁
1 引言
操动机构是开关电器的关键部件之一,其吸力-反力特性的好坏将直接影响到开关电器的通断能力及其使用寿命[1]。目前,电磁操动机构仍在断路器、接触器等电磁式开关电器中被广泛应用[2,3]。为解决电磁操动机构合闸操作末速度过快而引起的触头合闸弹跳问题,目前普遍使用缓冲弹簧来减少合闸时的机械冲击力。但这种解决办法不仅具有机械装置缓冲带来的可靠性低的问题,还具有因弹簧缓冲特性的可控性差而不利于实现合闸过程智能操作的不足。
针对上述问题,本文提出一种适用于电磁操动机构合闸过程的电磁缓冲控制思想。所谓电磁缓冲控制,就是在触头合闸运动至末端的某段时间内对缓冲线圈施加合适的反向激磁电流,利用反向电磁力来相对减小合闸力,从而降低机械冲击、减少触头弹跳,从而达到提高电磁式开关电器合闸特性、延长触头使用寿命的目的。
2 电磁缓冲技术仿真分析
论文以CJ20-10型接触器的电磁操动机构为例,采用ANSYS三维矢量分析法,针对不同缓冲电流以及不同缓冲位置时电磁操动机构的合闸吸力特性进行了仿真计算[4-7]。该接触器为U型直动式结构,触头开距为4mm,绕组匝数13匝,合匝时施加120A的电流的激磁电流,反向激磁缓冲电流可以根据需要调整。该电磁操动机构加设缓冲线圈后在ANSYS环境下的仿真模型如图1所示。
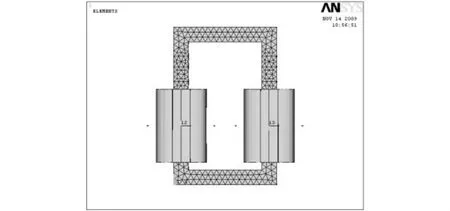
图1 线圈缓冲式电磁操动机构的ANSYS仿真模型Fig.1 ANSYS simulation model of electromagnetic actuator with buffer coil
为寻求合适的缓冲激磁电流,首先进行了缓冲电流仿真计算。如果单从减小机械冲击的角度考虑,在合闸阶段施加的反向缓冲激磁电流越大,越能增强缓冲作用,从而减小弹跳。但随着缓冲电流的增大,产生的电磁反力对电磁操动机构的固有吸力的相互抵消作用会不断增强,使其有效的合闸吸力越来越小。当合闸吸力被降低到小于其固有的反力时,触头便不能完成合闸操作。为了既能保证触头可靠合闸,即有效吸力始终大于固有反力,在电磁操动机构合闸开始时刻便分别施加15A、30A、40A反向激磁电流,得到合闸过程中不同缓冲电流一直作用下的电磁操动机构工作特性仿真曲线,如图2所示。由图2可见,三种电磁缓冲电流作用下,电磁操动机构的合闸吸力明显减小。在合闸过程进入超程区域以后,曲线5(即反向激磁电流为40A时的吸力曲线)与固有反力曲线的配合较好,既保证了触头能可靠合闸又能较大程度地提高缓冲性能,可以近似认为是一个合适的缓冲电流值。
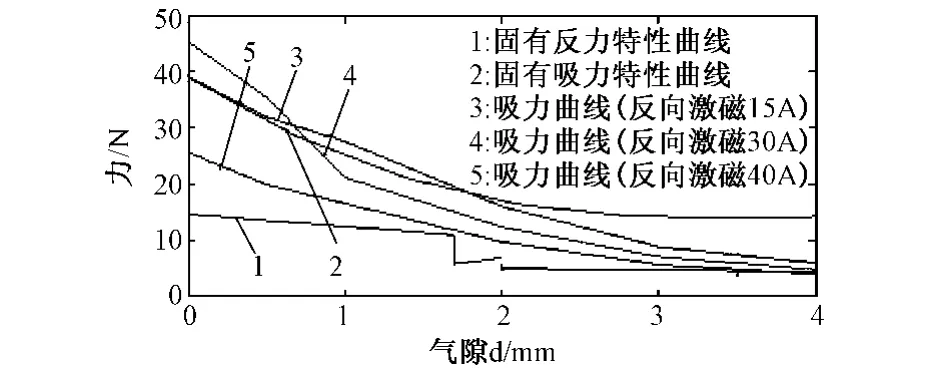
图2 不同缓冲电流作用下电磁操动机构的工作特性仿真曲线Fig.2 Operating characteristics simulation curves of electromagnetic actuator under different buffer-current conditions
但在合闸的起始阶段,三种电磁缓冲作用下的电磁吸力曲线与固有反力特性的配合程度不是十分理想,这说明,在合闸开始时刻就施加缓冲电流是不合适的。同时,由于操动机构的运动存在一定的惯性,即从施加缓冲电流、产生电磁反力到运动速度的下降需要一定的过渡时间。因此,在合闸过程的最末端施加缓冲电流,可能存在着因缓冲作用时间较短而无法有效缓冲的不足。为此,在确定了合适的缓冲电流的前提下,选取一个合适的合闸位置进行缓冲激磁就显得十分必要。
图3为在合闸过程的三个不同位置开始施加40A反向激磁电流时的电磁操动机构工作特性仿真曲线。可见,由于没有在合闸开始时就施加反向激磁,所以,在开始合闸到施加反向缓冲电流的位置期间,电磁操动机构将按固有吸力特性进行合闸运动,不仅可以有效地避免合闸初期因缓冲电流过大而造成不能可靠合闸的可能性,又可以较大程度地弥补因施加缓冲而带来的合闸初期运动速度下降的不足。在合闸运动后期,缓冲电流的电磁反力开始起作用,使有效的合闸吸力减小、触头运动速度下降,从而降低了合闸末端的机械冲击作用、减少了触头弹跳,即实现了合闸过程的电磁缓冲控制。

图3 不同位置施加40A缓冲电流时电磁操动机构的工作特性仿真曲线Fig.3 Operating characteristics simulation curves of electromagnetic actuator under different applied locations of 40A buffer current conditions
3 电磁操动机构电磁缓冲实验研究
3.1 实验方案
实验装置由两个牵引力电磁铁组装而成的电磁操动机构模拟装置和以MMA7260Q型加速度传感器为核心的控制器组成[8],如图4。该实验装置的动作与接触器的吸合原理完全一致,与接触器不同的是此实验装置在动铁芯另一端装有另一个电磁线圈(即缓冲线圈),此线圈用来施加反向激磁达到电磁缓冲的作用。
加速度传感器测量原理本质是两片弹性间距的平板电容,改变间距即改变电容,因而改变输出电压。所以通过观察示波器输出的电压波形大小,就可以知道电磁操动机构振动的情况。实验将加速度传感器固定于操动机构的静铁芯端部,通过示波器观察输出信号幅度及频率,可以分析出触头振动情况,进而通过调节反向激磁线圈电流及通电时间,来达到减少动铁芯的振动与触头的弹跳的目的。实验装置中动铁芯行程为12mm,为了使触头吸合时产生的振动和弹跳最小的同时,得到最佳的反向激磁位置,实验中使用电子接近开关作为动铁芯运动位置信号的检测元件。
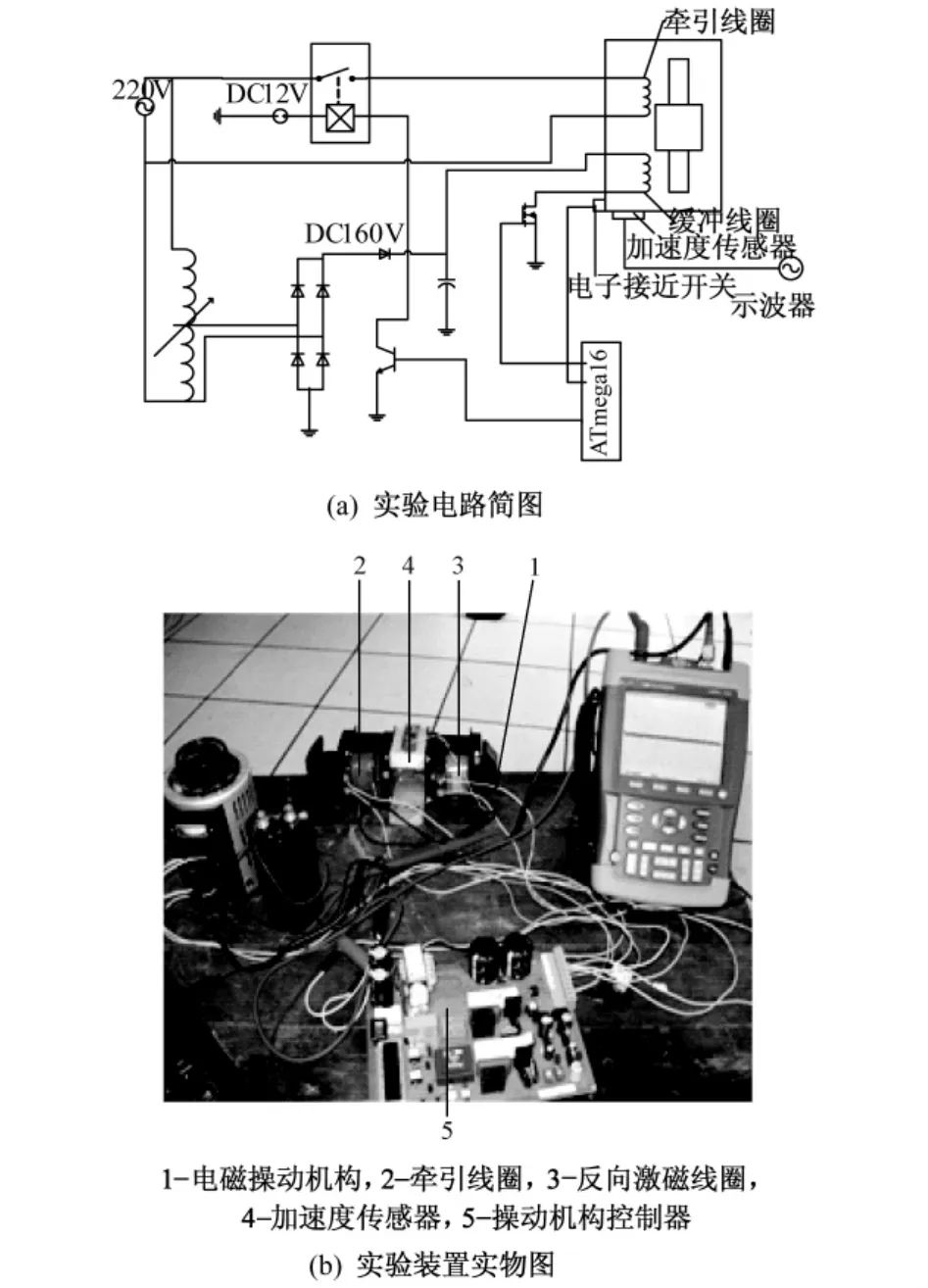
图4 实验电路简图与实验装置Fig.4 Circuit and picture of experimental device
实验过程中,电磁操动机构的主励磁线圈电源为AC220V,施加反向激磁的缓冲线圈电源为DC160V。市电通过调压器降压,再经全桥整流后得到160V脉动直流给储能电容器充电[9]。当电容器电压符合条件时,控制器发出吸合信号,继电器接通主励磁线圈电源,电磁机构动作。当动铁芯运动到接近开关限定位置后,控制器在收到传感器发来的中断信号后,发出一定时间的反向激磁信号,控制功率MOSFET导通,电磁缓冲线圈获得电流,此时动铁芯受到反向的电磁力而使触头末速度大大降低,从而减轻了吸合时的振动强度。通过示波器观察由加速度传感器检测的触头对触点撞击的振动波形,反复调整接近开关的检测位置,就可以研究动铁芯在不同位置施加缓冲激磁时的振动规律[10]。
3.2 实验结果分析
为了在保证电磁机构能够可靠吸合的同时减少振动和触头弹跳的不利影响,实验利用控制器对位置信号进行测量并且严格控制缓冲激磁线圈的通电时间,分别验证了动铁芯在不同位置时开始缓冲激磁与动铁芯在同一位置而施加不同的缓冲激磁时间两组实验效果,分别如图5、图6所示。
从图5可以看出,电磁操动机构在不施加反向激磁和施加反向激磁的情况下有明显的不同,无电磁缓冲时触头弹跳幅度大而且频繁,施加电磁缓冲后弹跳幅度减小而且次数减少。同时也可以看出在不同位置施加反向激磁,激磁效果不同。当缓冲激磁时间同为1ms时,在触头工作间隙为8mm时缓冲效果较好。

图5 不同行程位置时施加反向激磁时的振动波形Fig.5 Vibration waveforms under different applied location of reverse excitation conditions
图6是电磁操动机构在触头行程相同而缓冲激磁时间不同时的振动波形。由图可见,因电磁缓冲通电时间的不同,起到减小振动的效果也不同。通电3ms时的效果明显好于其它情况。但激磁时间既不是越短越好,也不是越长越好,太短起不到太好的缓冲作用,太长又会使分合闸时间过长,所以选择适当的时间施加是很重要的,同时也要配合在适当位置施加才会达到较为理想的缓冲效果。
4 结论
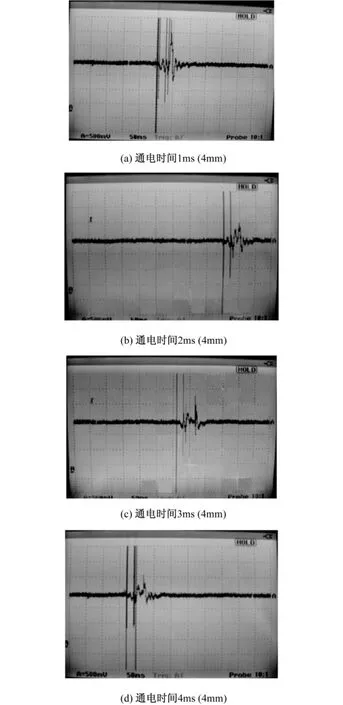
图6 不同反向激磁时间条件下的振动波形Fig.6 Vibration waveforms under different reverse exciting time conditions
1)提出一种适用于电磁操动机构合闸过程的电磁缓冲控制思想,通过对缓冲线圈施加反向激磁电流,利用反向电磁力来降低机械冲击,实现合闸缓冲。
2)初步研究表明,利用电磁缓冲控制方法的确可以起到降低合闸末端时的机械冲击、减少触头弹跳的作用。但缓冲电流的大小以及缓冲电流的施加位置、施加时间对电磁操动机构的吸力特性具有重要影响,只有综合考虑这三种因素、选择合适的控制条件才能得到较为理想的合闸特性和缓冲效果。
3)电磁缓冲控制对于其它操动机构中存在的合闸冲击问题也具有一定的借鉴意义,将该控制策略应用于实际还需进行大量而又深入的研究工作。
References):
[1]游一民 (You Yimin).永磁操动机构的发展与应用(Development and application of permanent magnetic actuator)[J].高压电器 (High Voltage Apparatus),2003,39(6):54-56.
[2]汤敬秋(Tang Jingqiu).电磁操动机构中凸轮机构的设计及仿真(Design and simulation of electromagnetic actuator's cam machine)[D]. 保定:华北电力大学(Baoding:North China Elec.Power Univ.),2004.
[3]王海潮,张继华,郭凤仪 (Wang Haichao,Zhang Jihua,Guo Fengyi).新型永磁操动机构智能交流接触器的研究(Research on new type permanent magnetic actuator intelligent AC contactor)[J].低压电器 (Low Voltage Apparatus),2009,(5):8-11.
[4]贾峰(Jia Feng).交流接触器三维电磁场分析 (Study on 3D finite element analysis for electromagnetic mechanism of AC contactor)[D].天津:河北工业大学(Tianjin:Hebei Univ.of Tech.),2009.
[5]王秋良(Wang Qiulian).Analysis of Mechanical Stress and Magnetic Field in Nuclotron Dipole Magnet for GSI Accelerator[J].电工电能新技术 (Adv.Tech.of Elec.Eng.& Energy),2004,23(3):13-17.
[6]安涛(An Tao).断路器操动机构仿真模型在故障诊断中的应用 (Application of CB operating mechanism simulation model in fault diagnosis)[J].电工电能新技术 (Adv.Tech.of Elec.Eng. & Energy),2010,29(1):41-44.
[7]胡辉,杨旗,包斌,等 (Hu Hui,Yang Qi,Bao Bin,et al).基于ANSYS的空气电弧放电等离子体温度数值模拟(Numerical simulation of arc plasma temperature based on ANSYS)[J].电工电能新技术 (Adv.Tech.of Elec.Eng.& Energy),2009,28(2):20-23.
[8]Micromachined accelerometer MMA7260Q datasheet[Z].Freescal semiconductor.Inc.,2005.
[9]周茂祥 (Zhou Maoxiang).低压电器设计手册 (Low voltage apparatus design manual)[M].北京:机械工业出版社 (Beijing:China Machine Press),1992.
[10]S-H Park,J Lee,J Yoo.Effects of design and operating parameters on the static and dynamic performances of an electromagnetic valve actuator[J].Proc.Instn Mech.Engrs,J Automobile Eng.,2003,217(3):193-201.
Simulation and experimental research on electromagnetic buffer of electromagnetic actuator
GUO Feng-yi,LI Peng,LI Bin,WANG Zhi-yong,LI Chun-guang,WANG Ji-qiang,WANG Xi-li
(Liaoning Technical University,Huludao 125105,China)
To compensate the shortcomings of spring buffer method,a kind of electromagnetic buffer control idea used for electromagnetic actuator on the course of closing processes was introduced.Applying a proper reverse exciting current to the buffer coil during the closing movement,a reverse force generated by the reverse current will decrease the inherent closing suction,therefore,can reduce the mechanical impact and achieve the function of closing buffer.By 3D vector analysis method with ANSYS software,the simulation calculation on closing suction characteristics of electromagnetic actuator under different conditions was carried out.Meanwhile,the contactor vibration curves were observed by a special experimental device.Preliminary studies have shown that the buffer current and its imposing position and imposing time have an important influence on suction characteristics.Only with comprehensive consideration of these three factors and selection of the appropriate control conditions,it is possible to get more satisfactory closing properties and buffer effects.The electromagnetic buffer control idea has certain significance of reference for other actuators to solve the existing closing impact problem.
electromagnetic buffer;electromagnetic actuator;reverse excitation
TM561
A
1003-3076(2010)03-0068-04
2009-09-13
国家自然科学基金资助项目(50677027);辽宁省优秀人才支持计划项目(2007R22)
郭凤仪(1964-),男,内蒙籍,教授/博导,主要研究方向为电器智能化、电接触理论及其应用。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:35:14
橡塑技术与装备(2022年8期)2022-08-05 07:04:56
防爆电机(2022年3期)2022-06-17 01:40:58
化工管理(2022年11期)2022-06-03 07:08:24
防爆电机(2022年2期)2022-04-26 13:57:02
机械工程师(2020年12期)2020-12-23 02:15:40
中国电气工程学报(2019年21期)2019-10-21 17:12:09
经济技术协作信息(2018年8期)2019-01-14 03:06:38
苏州市职业大学学报(2018年4期)2018-11-02 07:18:18
少年科学(2015年7期)2015-08-13 04:14:32
