基于DFA复合式Agent模型的设计与实现
2010-05-31 06:09卢薇薇蔡自兴文志强陈爱斌
中南大学学报(自然科学版) 2010年2期
卢薇薇,蔡自兴,文志强,陈爱斌
(中南大学 信息科学与工程学院,湖南 长沙,410083)
多移动体的多目标协作跟踪一直是计算机视觉中极富挑战性的问题,随着机器人硬件设施、计算机网络技术的快速发展,机器人团队完成复杂任务的能力也越来越强。目前,人们对多目标协作跟踪的研究着重于多Agent系统的体系结构、任务分配、运动协调及控制、可重构机器人等方面[1-2]。要解决在未知环境中协作检测与跟踪动态多目标问题,要求多Agent系统和单个Agent模型均具有合理和先进的体系结构,即保证异步的通过多机器人上的Agent模型对环境进行实时观察,并解决局部问题,又通过同步整个多Agent系统之间的信息,保证信息的实时性和准确性,进而根据全局信息进行决策。多移动机器人协同的体系结构主要有集中式、分布式和复合式。近年来,在多目标协作检测及跟踪方面所牵涉的多Agent系统的体系结构,大多是采用分布式或复合式来进行调控,比较典型的有 GOFER[3],MURDOCH[4],KAMARA和ALLIANCE等[5]。ALLIANCE体系结构可使机器人实现基于区域进行协同检测和跟踪。Ukita等[6]使用一种Active Vision Agents (AVAs)的三层交互结构,研究了室内环境下固定底座可转动摄像头检测跟踪动态多目标的情况。相对而言,多Agent 系统中的主要组成部分即Agent模型主要集中在单Agent的理论与体系结构上。例如:BDI(Belief, Desire, Intention)结构的实用推理Agent[7-8];归类式结构的反应式Agent等[9]。在多移动体的多目标协作跟踪中,由于目标和 Agent均是动态的,实时性高,且个体性能有限等,因而,这些Agent模型存在一定的局限性:在大量Agent需要进行信息交互的情况下,它们不能通过思维状态获取环境信息指导动作,并且不能与当前其他Agent群体进行信息交互的团队协作,从而不能计算出精确性更高的结果[10-11]。由于意图在实用推理中的重要性以及它在逻辑上并不能归结为信念和愿望,因此,在具体应用时,应针对实际需求舍弃BDI框架的部分描述能力,并进行改进[12-13]。为了较好地解决多移动体的多目标协作跟踪中信息和决策的同步与异步问题,本文作者以从BDI理论模型发展而来的复合式Agent模型为原型,提出了1个基于有限状态自动机的Agent模型,可适用于集中式、分布式和复合式的多 Agent多目标协作跟踪系统。
1 基于有限状态自动机的Agent模型结构设计
1.1 复合式Agent
复合式Agent是以BDI为理论模型在Agent内组合多种相对独立和并行执行的智能形态,其结构包括感知、动作、反射、建模、规划、通信和决策等模块,改进前后的复合式Agent模型结构如图1所示。Agent通过感知模块来反映现实世界,并对环境信息进行抽象,再送到不同的处理模块。若感知到简单或紧急情形,信息就被送入反射模块,做出决定,并把动作命令送到行动模块,产生相应的动作[14]。从1个Agent的社会性来看,这样的Agent个体之间是没有差异的,它们通过自身的智能形态,改变环境,而在大量需要合作的情形下,环境希望Agent相互之间通过某种形态体现出合作的主动性和可靠性[15-16]。而BDI理论支持的Agent模型更偏重于个体思维状态所指引的动作与环境信息的混合[17]。因此,采用一定的方法使Agent模型自身提供1个抽象的整体形象负责和对外的进行信息交互,对内处理问题的分解和局部问题的优化有重要的意义。
1.2 结合有限状态自动机(DFA)对复合式 Agent的改进
有限状态自动机是计算理论中计算模型的一种,可以自动识别符合定义的任何一种语言,表示为其中,Q是1个有穷集,它的每个元素均表示当前系统的1个状态,这些状态在接收到可接受的输入符号Σ时,将会按照转移函数δ从一个状态准确地转移到下一个后继状态。当集中为F 终态时,表示可以结束输入[18]。本文对Agent模型的讨论以基于1个黑板模型[19]的服务器端为上层监控,可接受Agent个体信息交互控制的客户端/服务器模式复合式多Agent系统。改进后的复合式Agent模型主要包括如下部分:用DFA所维持的行为状态模型、建模部分、意外处理、决策生成、模块库、通信模块和动作执行器与感知器。其中,意外处理和决策生成组成了行为决策层的实现实体,体现了对Agent自身愿望和意图的维护。
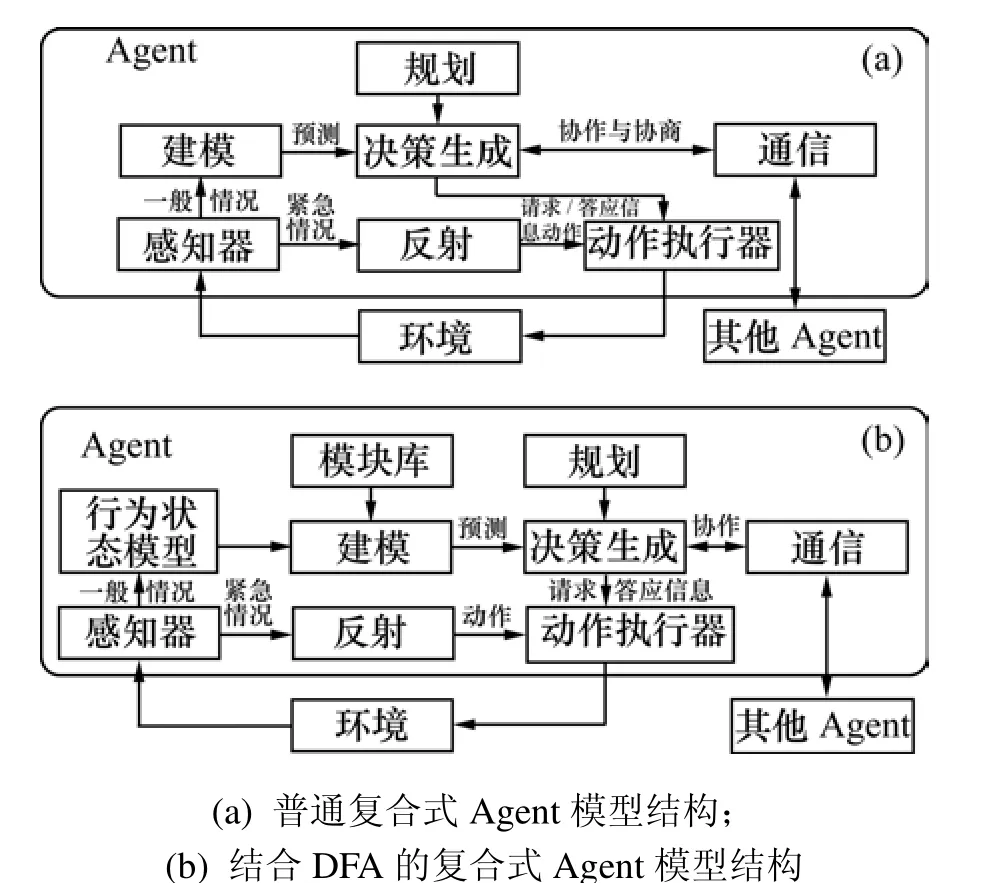
图1 改进前后的复合式Agent模型结构Fig.1 Structure of complex agent without and using DFA
基于有限状态自动机的 Agent模型对复合式Agent模型的改进主要在如下2个方面:
(1) 设计了 1个以有限状态自动机为基础的行为状态模型。在该模型中,感知器从外界环境获取信息后,通过行为状态模型的不同状态,进行选择性建模。状态转移条件可以定义为其他Agent发送的请求或自身根据环境信息做出的决策。通过行为状态模型,可将个体思维状态所指引的动作与环境信息的混合进行了有效的分离,增加了Agent模型设计的可扩展性。
(2) 通过行为状态的体现,对 Agent模型的表现形式进行抽象,使Agent模型之间的社会性和协作性得到了提高。以行为状态为指标从社会的角度对Agent群体进行团体的划分,直观的区分可实时灵活调度的Agent个体,可分簇进行团队任务的Agent个体和处于不同优先级的任务中的Agent个体等。服务器端和不同的Agent群体以团队为单位来进行交流。团队中以选定的领队为中心,该领队对上负责获取服务器端和其他Agent团队的信息,对下获取目前该团队中其他Agent个体的信息,并根据所获取的团队信息进行融合与重建,以一个整体的形式对外提供有效信息。每个Agent个体则负责与团队中其他Agent个体进行信息交流并负责管理自己内部各个传感器获取的信息。Agent个体通过各个模块对获取的各种信息进行处理与整合,并根据历史信息与其他Agent协商且做出相应决策。
2 行为状态模型的设计
2.1 Agent个体行为分析
有限状态自动机维持的行为状态模型定义如下。
定义1 全自动状态:在Agent行为过程中,在没有其他Agent和服务器端黑板模型的信息支持的情况下,能够自主地完成目标发现和跟踪的任务,并能自主搜寻其他Agent个体的状态,被称为全自动状态。
定义2 半自动状态:在Agent行为过程中,在指定协作的情形下,Agent接受特定指令,跟踪搜寻指定目标,与已知的Agent进行通信,协作完成任务,不能随意放弃现有任务,进行其他非授权的自主行为,被称为半自动状态。
1个社会性的群体在需要协作的团队精神时,会希望对Agent的权限有所限制和区分。在半自动状态中,服务器上层监控首先针对任务和Agent个体状态划分Agent群体,然后,该群体中的Agent个体针对群体分配任务和权限,通过与服务器及群体中其他成员联系获取详细的目标信息,有针对性地等待和搜寻丢失的目标。而全自动状态下的Agent个体,可以自主独立运行,独立决策,也可以与其他Agent群体协商决策,或根据服务器端黑板模型的信息进行决策,并且对任务的完成没有强制性,如果能力不够,就不去进一步进行搜寻来强制完成任务。
2.2 DFA设计
由于Agent个体行为表现的固定性,全自动状态和半自动状态下的有限状态自动机的状态集是一致的,2个状态可以根据现实环境和任务需求自由转换。复合式Agent上维持行为状态模型的有限状态自动机可以通过探测的环境信息 I、需要完成的任务信息 M和人为的指定信息H,以N=f (I, M, H)为选择指标来选择。
为了在1个实时性强、交互性强的多Agent系统中保证每个Agent模型与其他Agent能够协作自主地完成动态多目标协作检测跟踪的任务,构建了1个有限状态自动机来描述Agent个体在现实环境中的行为状态,表示成数学模型为,其详细介绍如下。
(1) 1个状态的有穷集合:

其中:Wait为等待状态;Detect为检测状态;Track为跟踪状态;Lost为目标丢失状态;Busy为忙碌状态。当多Agent协作完成任务时,为了资源最优分配,协作的部分Agent会接收命令后处于Busy状态,其优先级最高,不可被中断,所接收的命令处于命令列表中,按照时序完成。协作的Agent接收的命令来自服务器端或协作的Agent群体的管理者,服务器端会根据实时环境或任务情形对Agent分布进行干扰。而Agent群体的管理者针对当前任务管理协作的Agent群体,通过对 Agent个体发送指令保证资源利用最大化。Agent个体接受指令后会保存当前被中断的状态信息,进入Busy状态完成任务。Wait状态为Agent准备状态,而其他3个状态管理与实现了Agent个体对目标的有效跟踪。
(2) 可接受的输入集合Σ,它指明了所有允许输入的符号,有限状态自动机根据该集合中的符号进行状态的变化。这个集合中包括7个可输入的符号,它们代表在实际中相应的物理事件的发生:

其中:connect和unconnect表示Agent个体视频设备连接或断开;findobj和lostobj表示Agent个体在现有状态下,通过当前获取的视频图像和已知信息在视野可及的范围内搜寻到1个运动目标或在此情况下无法找到1个和历史信息吻合的目标;work和finishwork表示Agent个体接受服务器指定任务或已完成指令队列中所有的任务。接收到work指令时,对Agent个体当前状态和相关信息进行保存,再去进行相应任务。执行finishwork指令时,从所保存的数据中获取任务完成前的状态信息,恢复到任务执行之前的状态。order表示Agent个体接受服务器的指令,转换到新的状态,完成指定的任务。
(3) 起始状态q0={Wait}和结束状态F={Wait}。
(4) 转移函数δ是Q×Σ→Q的一个映射,被有限状态自动机所识别。有限状态自动机转移函数如图 2所示,其中:实线为有限状态自动机各种状态下通用的转移函数,短虚线为半自动状态下有限状态自动机特有的转移函数,长虚线为全自动状态下有限状态自动机特有的转移函数。
2.3 建模部分
由于半自动状态下的DFA不具有较强的自主性,权限被大量限制,因此,主要通过全自动状态下的DFA来对建模部分进行说明。建模部分的功能是通过外界信息的获取、Agent自身有限状态自动机中提供的状态和模块库内的功能模块的选择建立观测到的目标模型和当前 Agent的抽象模型。为了保证当部分Agent个体检测到目标后,能够使得其他尚未检测到目标的Agent个体准确地搜寻到目标,目标模型的描述应具有可重建性。在设计中,对于目标的描述采用了2个不变量(颜色信息与轮廓信息)和1个可变量(区域信息)来表示,它们通过大量的信息保证了对目标重建的可靠性[20]。HSV色彩空间中颜色不变量和完整轮廓信息的选取既可在检测中减少由光线、阴影、遮挡和旋转等带来的干扰,又可在信息传输后,迅速地表述所描述的目标,因此,跟踪采用的算法主要通过基于颜色的 Meanshift算法来实现。为了实现对动态目标检测跟踪,在不同的状态下将调用不同的功能模块。整个有限状态自动机结合所需的功能模块对Agent的自主行为规划进行了完整的覆盖,状态集中的 Detect状态、Track状态和Lost状态这3种状态的模块调用方案如图3所示。
2.3.1 Detect状态
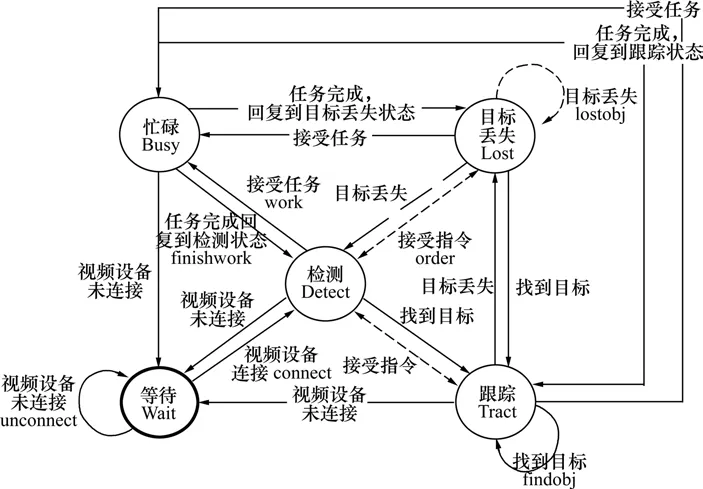
图2 结合DFA的复合式Agent模型中有限状态自动机转移函数示意图Fig.2 Transfer functions in complex Agent using DFA
Detect状态有3个出度,其中:1个到Track状态,1个到Busy状态,1个到自身的循环。Detect状态到Track状态的转换有findobj和order 2种方法。Findobj法是通过调用模块库中的基于三帧差的目标检测,形态学去噪声、目标分割、合并与提取等模块完成对目标的查找;order法是与服务器端进行通信,接收跟踪指定目标的指令,完成相应的任务。Detect状态到Busy状态的转换是由于接收到服务器端产生的指令 order而实现的强制转换,而 Detect到自身状态的循环的lostobj是和Detect到Track状态的findobj所对应的互补行为。

图3 建模模块调用方案Fig.3 Methods of combining modules through DFA
在全自动状态下计算检测运动目标,若可以计算出有效目标信息,则是findobj,它以满足先到先得、跟踪可视面积最大、目标与Agent个体距离最近为标准,选取最优目标并进行动作转换到Track状态进行跟踪,其他目标可进行基本的视觉跟踪。若没有跟踪到目标,则是lostobj,回到Detect状态继续检测。
2.3.2 Track和Lost状态
Track状态的出度有 2种状态转换:一种是findobj,若一直有效地跟踪着当前目标,则维持跟踪状态;另一种是lostobj,丢失目标之后,转入Lost状态。进入跟踪状态的findobj动作有3种,但与Detect状态的findobj和Track状态相比,Lost状态的findobj有所不同。Detect状态的findobj找到的目标是预先未知的,而Track状态和Lost状态的findobj都是根据Detect状态获取的或者根据服务器端发送的已知目标信息来查找与跟踪。
2.3.3 意外处理
在光线、物理惯性等各种不可预知的条件影响下,目标的意外丢失是很有可能出现的。因此,为了处理这种意外,为Agent个体设计了记忆和预测功能。它们在对 Track与 Lost状态进行转换的过程中起辅助作用。
记忆是Agent个体在Track状态的同时,将已知信息在容器中进行保存的过程,它可分为短期记忆和长期记忆。短期记忆会记住Agent个体和目标最近所做的动作,而长期记忆会记住在跟踪目标的整个过程中,所得到的Agent个体和目标移动的路径。在获取到一定量信息后,可以使用曲线拟合对Agent个体和目标移动的路径的信息进行归纳。在Agent个体的客户端上,由于性能限制、图像数据处理和通信等大量任务,只需要考虑对部分数据进行直线或简单的曲线拟合。服务器端会对总体的数据进行计算。
预测是根据历史信息计算与分析目标下个时刻将出现的位置的过程。当计算目标的面积小于某个阈值时,可认为目标丢失,则进入Lost状态。短期记忆中最近所做的动作影响最大,其他的起辅助检验工作。根据短期记忆完成的1~2个动作来查找目标,若失败,则通过获取长期记忆的多项式曲线拟合出的目标轨迹找到目标接下来的角度,转到预测到的角度来进行观测。若在一定时限内都无法找到目标,则认为目标确实丢失,发送信息到服务器端,并根据情况进行状态转换。
3 实验结果
本文用2个不同实验来测试提出模型的有效性。硬件实验平台为:AmigoBot改造后的MORCS-2及其团队,最大运动速度 750 mm/s,处理器速度为 677 MHz,内存为 512 Mb,摄像头为长城摄像头GWS-1320,130万像素,无线网卡TL-WN321G,最大传输速度 54 Mb/s;软件实验平台为:操作系统Windows XP,编程环境为Microsoft Visual Studio .NET 2003,编程语言为C++,服务器端采用黑板模型,支持以人作为监督者的遥操作和全自主协作2种工作模式,客户端为AmigoBot平台上设计改进后的结合DFA的复合式Agent模型;网络环境为基于簇的按需路由通信方式的Ad-hoc网络,通信遵循IEEE802.11b/g无线通信标准。实验环境为室内,均匀自然光照。
3.1 固定路线的目标跟踪实验
在1个区域内,1个独立的Agent在使用结合DFA的复合式Agent和使用不带DFA的复合式Agent模型2种情形下,跟踪1个固定路线的目标,对其跟踪定位,并分析误差。跟踪路线如图4(a)所示。
3.1.1 理论路线的确定方法
在理论路线计算时,可认为Agent启动与运动过程中的速度变化是瞬时完成的,Agent在运行过程中能维持匀速运动,每次Agent旋转的偏移角度为θ。当目标和Agent在1条直线上时,理论路线为直线段,当目标和Agent不处于1条直线上时,但θ≥45˚时,Agent的路线也为直线段;当θ<45˚时,Agent的路线为由|90˚/θ|-1段直线组成的折线段,具体计算方法如下:
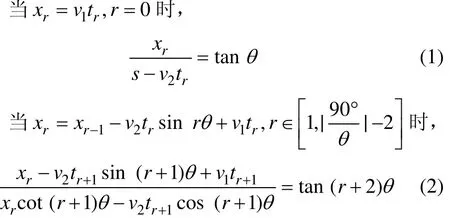
获取理论路线的示意图如图4(b)所示。可见:当目---标-→到达S1点时,Agent到达S0点,目标改变方向沿方向行走,则Agent行走路线为 。设 S0与 S1之间距离为s,目标运动速度为v1,Agent速度为v2(已知v2略大于v1)。当目标从S1出发,到达b1点时,Agent从S0出发,到达a0点。由于目标已经到达Agent视野的临界点,因此,Agent以转动θ为单位调整方向继续跟踪,行走路径将沿着a0到b1方向进行。当目标从 b1点行进到 b2点时,Agent也从 a0点行进到 a1点。设从 S0到 a0的时间为t0,a0到a1的时间为t1…an到S2的时间为tn+1。s与θ为已知,要得知Agent的路径,即求解出t0, t1, …, tn+1。其中:当θ≥45˚时,只需要计算r=0的情况,便可得出直线路径。
从式(1)和式(2)可计算 t0, t1, …, tn+1,并可得到Agent行走的理论路线。从图4可得:带DFA的Agent行走 路线比不带DFA的Agent行走的路线具有更优效果。

图4 带DFA模型的Agent个体和不带DFA模型的Agent个体对固定路线目标的跟踪Fig.4 Path data generated by agent using DFA and without DFA
3.1.2 目标跟踪实验结果比较
结合DFA的复合式Agent个体和使用不带DFA的复合式 Agent个体在跟踪同一个固定路线的目标时,将它们的跟踪实际路线与式(1)和式(2)计算的Agent个体跟踪理论路线进行比较,可见:结合DFA的复合式Agent个体有较明显的性能优势。其主要原因在于:使用不带DFA的复合式Agent个体将直接调用模块库中的模块进行建模,且和服务器交流的信息中不带状态信息。所获取的外界信息和与服务器交流的信息中,只能带有当前是否找到目标、是否在跟踪目标等标志位信息。如果目标丢失后,通过意外处理进行搜索,搜索不到则自动继续检测。但是检测状态下传回的Agent个体信息将和丢失状态传回的Agent个体信息将不会被加以区分,因此,意外处理性能将下降,跟踪效果变差。
选择在相同时间点的Agent个体实际路径上的位置(',')x y 与理论路径上的位置(x, y)之间的偏差作为标准来衡量Agent个体的目标跟踪效果。对于改进前后的方法分别均匀取30个时间点,并分别计算实际路线与理论路线偏差,结果如图5所示。带DFA模型的Agent个体行走路线相对与不带DFA模型的Agent个体行走路线偏差较小,主要是3个直角处偏差较大,第1个直角处,目标与Agent个体之间有一段初始距离,因此,Agent个体的拐弯较大,偏差也最大。而由于Agent个体速度略大于目标,因此,在第1个拐弯之后,Agent个体已经和目标保持了一个稳定的跟踪距离,后2个拐弯的偏差相对较小,但还是比直线距离跟踪偏差大。通过计算所取的样本均值,可得偏差的期望信息,结果如表1所示。可见,带DFA模型的Agent个体行走路线偏差期望值约为不带DFA模型的Agent个体行走路线偏差期望值的一半。再通过样本方差来计算2种路线的样本波动大小,可知带DFA模型的Agent个体行走路线中样本波动较小,约为不带DFA模型的Agent个体行走路线样本方差的一半。
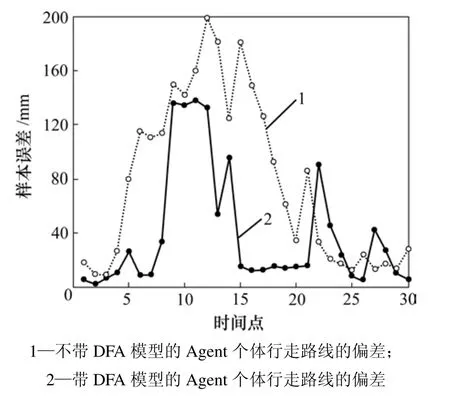
图5 实际位置与理论位置的偏差比较Fig.5 Errors generated by agent using DFA and without DFA

表1 不同Agent个体行走路线的平均偏差与样本方差Table 1 Expected values of error and sample variant generated by agent using DFA and without DFA
3.2 基于区域的目标跟踪实验
基于区域的目标跟踪实验[21]是多目标动态检测与跟踪研究中经常使用的一种实验手段,可通过这种实验验证所设计的结合DFA的复合式Agent个体的可行性。由于使用不带DFA的复合式Agent个体的跟踪性能较为自主,在协作跟踪时可调度性较差,在协同检测自由路线多目标并实时进行协同跟踪时难以完成任务,因此,可以通过使用多个具有结合DFA的复合式Agent个体模型的机器人在该实验中完成多目标跟踪任务,由此验证结合DFA的复合式Agent模型的可行性和其在协同上的优越性。在设计的实验中,2个独立的机器人各负责观测一块区域,它们需要保证当前被观测的区域中所出现的动态目标均能被跟踪,并记录相关信息。跟踪基本规则为:当1个自由路线的目标进入观测区域时,若当前被观测到的目标没有被其他机器人跟踪,则对其进行跟踪;若当前目标已有机器人对其跟踪,则根据机器人当前处于的跟踪状态、机器人负责观测区域的目标出现概率、机器人和观测点的距离等因素计算2个机器人之间的竞争成本,成本较低者将获得该目标的跟踪权限,而竞争失败者,将回到自己负责的区域观测点继续进行观测。实验结果如图6所示。实验步骤如下:
(1) 实验开始时,机器人1和机器人2并行排列,各负责一块区域进行观测,自由路线目标A进入机器人1的观测区域。
(2) 机器人1在观测区域观测到目标A后,和机器人2通信得知尚未有机器人跟踪目标A,机器人1获得权限对目标A进行跟踪,如图6 (a)所示。
(3) 目标A进入机器人2的观测区域,机器人1和机器人2通信确认它们观测着同一个目标,2个机器人进行成本计算。根据竞争成本计算的假设,相对于机器人2,机器人1具有较高的疲劳度,并距离区域观测点更远,计算出的竞争成本比机器人2的高,如图6 (b)所示。
(4) 目标A继续前进,机器人1放弃目标A的跟踪,将回到区域观测点继续观测,机器人2获得目标A的跟踪权限,对其进行跟踪,如图6 (c)所示。
(5) 目标A继续前进,机器人2继续跟踪目标A,目标B出现在机器人1的观测区域,机器人1观测到目标B后,与机器人2通信后,确认目标B的状态和信息,并获得权限跟踪目标B,如图6 (d)所示。

图6 基于区域的目标跟踪实验(箭头表示机器人和目标运动的方向)Fig.6 Region based multi-object tracking experiment (arrows indicate robots and objects moving directions)
4 结论
(1) 在复合式 Agent模型的基础上,引入有限状态自动机作为行为状态模型进行扩展,并针对多机器人团队多目标协作检测与协作跟踪的环境进行了设计。
(2) 在实际环境下通过单机器人承载改进前后的Agent模型进行固定路线目标的跟踪,对模型性能进行分析,证明改进后的模型能明显改善目标跟踪的性能,跟踪偏差的期望值与样本方差均降为改进前的一半。
(3) 改进后的模型通过可自由转换的 2种有限状态自动机进行协作,为多机器人协作检测和跟踪动态多目标提供了有效途径,实现了基于区域的目标跟踪。
(4) 多 Agent群体分配算法优化等方面有待进一步研究。
[1] 蔡自兴, 陈白帆, 王璐, 等. 异质多移动机器人协同技术研究的进展[J]. 智能系统学报, 2007, 2(3): 1-7.CAI Zi-xing, CHEN Bai-fan, WANG Lu, et al. The progress of cooperative technology for heterogeneous multiple mobile robots[J]. CAAI Transactions on Intelligent Systems, 2007, 2(3):1-7.
[2] Sukhatme G S, Montgomery J F, Mataric M J. Design and implementation of a mechanically heterogeneous robot group[C]//Proc of SPIE Conference on Sensor Fusion and Decentralized Control in Robotic Systems 2. Boston, 1999:122-133.
[3] Caloud P, Choi W, Lacombe J C. Indoor automation with many mobile robots[C]//Proceedings IEEE International Workshop on Intelligent Robotics and Systems’90. Tokyo, 1990: 67-72.
[4] Gerky B, Mataric M. Auction methods for multi robot control[J].IEEE Transactions on Robotics and Automation, 2002, 18(5):758-768.
[5] Parker L E. ALLIANCE: An architecture for fault tolerant multi-robot cooperation[J]. IEEE Transactions on Robotics and Automation, 1998, 14(2): 220-240.
[6] Ukita N, Matsuyama T. Real-time cooperative multi-target tracking by communicating active vision agents[J]. Computer Vision and Image Understanding, 2005, 97(2): 137-179.
[7] Rao A S, Georgeff M P. Modeling rational agents within a BDI-Architecture[C]//Proceedings of the Second International Conference on Principles of Knowledge Representation and Reasoning. San Mateo: Morgan Kaufmann Publishers, 1991:473-484.
[8] Brooks R. Intelligence without representation[J]. Artificial Intelligence, 1991, 47: 139-159.
[9] 黎建兴, 毛新军, 束尧. 软件 Agent 的一种面向对象设计模型[J]. 软件学报, 2007, 18(3): 582-591.LI Jian-xing, MAO Xin-jun, SU Rao. An object-oriented design model of software Agent[J]. Journal of Software, 2007, 18(3):582-591.
[10] 谭显东, 胡兆光, 张克虎, 等. 构造多 Agent模型研究差别电价对行业影响[J]. 中南大学学报: 自然科学版, 2008, 39(1):172-177.TAN Xian-dong, HU Zhao-guang, ZHANG Ke-hu, et al.Constitution of multi-agent to study influence of discriminating power price on sectors[J]. Journal of Central South University:Science and Technology, 2008, 39(1): 172-177.
[11] GAO Jian-hua, HU Xu-dong, WU Chuan-yu. Design and simulation of multi-robot logistic system[C]//Mechatronic and Embedded Systems and Applications, Proceedings of the 2nd IEEE/ASME International Conference. Beijing, 2006: 106-111.
[12] 龚涛, 蔡自兴, 夏洁, 等. 分布式人工免疫系统的鲁棒性归约模型[J]. 中南大学学报: 自然科学版, 2007, 38(5): 956-961.GONG Tao, CAI Zi-xing, XIA Jie, et al. Reduction model of robustness for distributed artificial immune system[J]. Journal of Central South University: Science and Technology, 2007, 38(5):956-961.
[13] 蔡自兴, 徐光祐. 人工智能及其应用[M]. 北京: 清华大学出版社, 2004.CAI Zi-xing, XU Guang-you. Artificial intelligence: Principles and applications[M]. Beijing: Tsinghua University Press, 2004.
[14] Sipser M. 计算理论导引[M]. 张立昂, 译. 北京: 机械工业出版社, 2000.Sipser M. Introduction to the theory of computation[M].ZHANG Li-ang, trans. Beijing: China Machine Press, 2000.
[15] Kanda A, Sato M, Ishii K. Environment recognition system based on multiple classification analyses for mobile robots[J].Journal of Bionic Engineering, 2008(5): 113-120.
[16] DeLoach S A, Valenzuela J L. An agent-environment interaction model[J]. Lecture Notes in Computer Science, 2007, 4405:1-18.
[17] Guerra-Hernandez A, Fallah-Seghrouchni A E, Soldano H.Learning in BDI multi-agent systems[C]//Proceedings of CLIMA IV: Computational Logic in Multi-Agent Systems. Berlin:Springer-Verlag, 2004: 39-44.
[18] 刘群, 夏虹. 多源信息融合系统的主动式黑板结构与模型[J].哈尔滨工程大学学报, 2007, 28(5): 910-916.LIU Qun, XIA Hong. Active blackboard model and construction of multi-source information fusion system[J]. Journal of Harbin Engineering University, 2007, 28(5): 910-916.
[19] Gonzalez R C, Woods R E. Digital image processing[M]. 阮秋琦, 阮宇智, 译. 北京: 电子工业出版社, 2003.Gonzalez R C, Woods R E. Digital Image Processing[M]. RUAN Qiu-qi, QUAN Yu-zhi, trans. Beijing: Electronics Industry Press,2003.
[20] Jung B, Sukhatme G S. Generalized region-based approach for multi-target tracking in outdoor environments[C]//Proceedings of 2004 IEEE International Conference on Robotics and Automation. New Orleans, LA, 2004: 2189-2195.
[21] Oswald N, Levi P. Cooperative vision in a multi-agent architecture[J]. Lecture Notes in Computer Science, 1997, 1310:709-716.
猜你喜欢
计算机工程与科学(2022年2期)2022-03-22
数学物理学报(2021年3期)2021-07-19
数学小灵通·3-4年级(2020年11期)2020-12-14
数码世界(2020年11期)2020-11-23
数学小灵通·3-4年级(2020年3期)2020-06-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
西北大学学报(自然科学版)(2018年2期)2018-04-18
网络空间安全(2016年11期)2017-02-13
软件导刊(2016年11期)2016-12-22