高分辨SAR复杂场景中的人造目标检测
2010-05-18 08:50:40张双喜邢孟道
电子与信息学报 2010年12期
郭 睿 臧 博 张双喜 周 峰 邢孟道
(西安电子科技大学雷达信号处理重点实验室 西安 710071)
1 引言
合成孔径雷达(SAR)在复杂环境下可以获得监视区域的高分辨率雷达图像,在战场侦察、民用搜救和地形测绘等方法具有重要的价值。在SAR图像中,人造目标大都具有强散射特性及固定形状,对其进行准确检测,在军事方面和民用方面都有很大的应用价值,可以提高SAR对目标的监视、识别、定位和描述能力等。但由于 SAR应用环境存在噪声、干扰等复杂的不利因素,致使目标检测虚警概率提高,算法鲁棒性下降。其中,针对特定环境背景和特定目标的检测方法相继被提出和实现[1-4]。这些目标检测技术从不同的角度对目标进行了有效的检测。恒虚警(CFAR)[1]主要针对点目标进行检测,因此被广泛应用于低分辨图像中的目标检测;Hough变化[2]是提取图像中直线的主要方法,主要被运用于道路,跑道,桥梁的检测中;对于与周围背景对比度较大的水上桥梁,多采用阈值方法[3]对其进行识别检测;双门限最佳直方图熵(KSW)法在对海面舰船检测[4]中的效果也已被证实。
本文针对场景中地物自然环境复杂,存在大量的非人造目标(即自然地物目标)的情况,提出了对其中的人造目标进行检测的方法。本文提出的检测算法基本思想是:在图像预处理阶段,根据图像信息熵的不同,设计出一种图像平滑方法—改进的Lee滤波,该方法不仅可以有效地抑制图像中的噪声,而且可以较好的保持图像的细节和邻域特征;然后利用门限化的分割技术,粗略检测出目标;最后根据目标的分形特征,采用方向梯度能量进行特征提取,找出人造目标和背景的形状和尺寸特征,实现对人造目标的准确检测。
2 图像预处理
基于信息熵的改进Lee滤波
由于SAR图像中含有大量的噪声,对后续的图像检测性能影响很大,通常都采用图像平滑的方法进行去噪处理。Lee滤波[5]方法是一种常用的低通滤波方法,但是常规的Lee方法在抑制噪声的同时消除图像的细节信息,为了在滤除随机噪声的同时又能很好地保持图像的细节信息,本文提出了一种基于信息熵的改进Lee滤波方法。

2.1 图像平滑处理
从上述的分析中可以看出,进行Lee滤波的关键技术在于对滤波参数b的估计,采用 Lee滤波中的窗口滑动方法,由于对中心像素的处理是采用窗口内所有点进行平均,因此,会将不同类型点信息混淆了,造成图像细节的损失,使得邻域特征的区别产生模糊。例如,当中心像素与其滑窗内的某一点特性不同,但进行平均后,两点的特性很可能就一致了,不利于对邻域内不同点之间特性的区分。为了能够很好地改进这一点,本文对Lee窗口滑动进行改进,来估计窗口中心像素的滤波参数b。
首先根据式(5)计算图像的信息熵:

式中pi为第i个灰度出现的概率。这里,根据 SAR图像信息熵的不同,将图像中的像素点大致划分为三类:高熵区(H>0.9),中熵区(0.5 <H≤ 0 .9),低熵区(H≤0.5)。
进行窗口滑动时,并不将窗口内的所有像素都用来对图像进行估计,而是选择窗口内与中心像素熵类型一致的像素进行估计。具体选择方法如图1所示(文中初始窗口大小为5×5):
设中心像素(i,j)为Aij,窗口内与Aij属于同一熵区的像素集合为B,不同的集合为C。如果集合B中的元素个数M≥24时,就可以对中心像素进行滤波参数b的估计;如果M<24,在窗口中的同类像素集B就需要扩大,这时,对初始的5×5窗口进行扩大,直到窗口内同类像素集B的元素个数符合M≥ 2 4。

图1 自适应窗口示意图
需要说明的是,在进行自适应滑窗处理时,窗口不能无限扩大,在这里规定一个最大步长step=4,即窗口边界上的边界点到中心像素的最大距离。当step>4时,就停止窗口的自适应增长,进行下一个像素点的滤波参数b的估计。
改进的图像滤波方法具体如下:(1)依照式(5)计算图像的信息熵,将图像分为3类区域:高熵区,中熵区,低熵区;(2)依照图1所示的方法进行自适应窗口滑动,估计滤波参数b;(3)将(2)中得到的滤波参数b代入式(4),得到未被噪声污染的原图像的估计值,即滤波后的图像。
从上可以看出,由于进行窗口滤波时选取的是位于同一熵区的像素点进行估计,因此,在中心像素与邻域像素不连续的情况下,有效地避免了邻域特征的混淆和扩展,对于图像轮廓等细节信息能够得到更好的保持,为后续图像中的目标检测提供了有利的条件。对图像的平滑处理完成后,就可以采用门限技术对图像进行分割,其中噪声对门限的影响被消除,分割结果更符合实际地物特征。
2.2 门限分割—双门限最佳直方图熵(KSW)法
对图像进行平滑处理后,采用Kapur等人提出的 KSW 方法对图像进行门限化分割,在高分辨复杂场景中粗略检测出目标。这种方法将信息论中Shannon熵概念用于图像分割,测量图像灰度直方图图的熵,由此找出最佳门限,其出发点是使图像中目标与背景分布的信息量最大。由于此方法已被广泛应用于海面舰船检测[4],这里不再对双门限KSW的方法步骤进行介绍。
3 图像分形特征提取
经过门限分割后得到的图像,背景对人造目标检测的影响已大大减小。此时,对于图中背景与目标,其形状与大小特征是不同的,因此根据分形特征[6]在多尺度图像目标检测中的优越性,采用方向梯度能量[7]特征提取分形特征,沿距离向(x方向)和方位向(y方向)两个方向来描述 2维目标总方向梯度能量,就可以完成对高分辨SAR图像中人造目标的分形(形状与大小)特征的描述,完成对目标的准确检测。
在2维目标总方向梯度能量中,复数的模是 2维目标的梯度总能量,代表物体尺寸的聚类特征。辐角是梯度总能量的方向,代表物体的形状特征。同时可以看出:当物体尺寸小于测量半步长,则方向梯度总能量为零;若物体尺寸等于或大于测量步长时,方向梯度总能量达到最大值并保持不变。由这些性质可以看出,利用方向梯度能量进行分形特征的提取,可以检测和识别不同的目标。
4 目标检测流程
对于高分辨 SAR复杂场景中的人造目标进行检测步骤如下:
(1)计算原始图像的信息熵,将图像划分为3类熵区域(高熵区、中熵区和低熵区);
(2)采用自适应窗口滑动方法,按图1所示方法对图像中每一像素点的滤波参数b进行估计;
(3)将滤波参数估计值b代入式(4),经计算得到滤波后的图像。完成图像处理的同时,对细节和邻域特征进行了有效的保持;
(4)计算平滑后的图像信息熵;
(5)采用双门限KSW方法,寻找最佳门限,对高分辨图像进行门限化分割,实现高分辨SAR人造目标的粗略检测;
(6)分别计算沿距离向(x方向)和方位向(y方向)的方向梯度总能量;
(7)计算2维目标的方向梯度总能量,提取模值;
(8)从步骤(7)中得到的模值信息,对图像中目标的大小和形状进行描述,得到准确的检测结果。
需要说明的是,在步骤(6)中,随着步长设置的不同,步骤(7)中提取得到的模值信息也不相同,通过不同步长的选取,可以获得人造目标的分形特征的不同描述。
结合 1,2节的原理分析,具体的高分辨 SAR复杂背景下的人造目标检测流程图如图2所示:
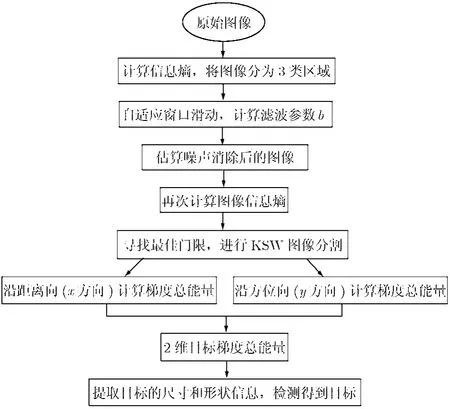
图2 高分辨SAR复杂场景下的目标检测算法流程
5 实验结果与分析
本文采用分辨率为0.3 m的高分辨SAR图像进行实验和分析。图3中图像大小为1500×3500,从图 3(a)中可以看到,原始图像中存在大量的噪声,会对后续的图像的处理带来不便。本实验是要将图像中的A、B两座高压线塔检测提取出来。
首先对图3(a)进行平滑处理,采用改进Lee滤波方法得到的平滑结果如图 3(b)所示,可以看到图中的噪声明显减少,图像的边缘细节等特征也都得到了很好的保持,通过计算,图像的方差均值比(s/m)从0.7975减小到了0.5244,无论图像域还是统计数值域,都证明了本文采用的改进Lee滤波方法是有效的。
图3(c)为直接采用KSW算法检测后的结果,可以看到此时对应A、B两座高压线塔的位置被检测出来了。不同于高分辨的舰船检测(其背景为海面,散射强度比舰船弱很多,目标的信杂噪比很高),在进行地面人造目标检测时,周围复杂的地物场景对人造目标检测有很强的干扰和混淆,尤其是在高分辨情况下,目标所在场景中会存在很多强散射的物体。因此,在检测到高压线塔的同时,图 3(c)中还存在散布的一些强散射点,大大降低了目标检测概率,因此需要进行更进一步的准确检测。
采用方向梯度能量进行分形特征的提取时,设置测量步长远小于图像中目标的大小时,得到的方向能量梯度的模如图3(d)所示,可以看到,此时图3(c)中粗略检测到的所有目标,它们的轮廓在图3(d)中都通过分形特征被描述出来。当改变测量步长,使得测量步长大于图像中目标的大小时,得到的方向能量梯度的模如图 3(e)所示,可以看到,此时图中只存在A、B两座高压线塔的信息,但是它们的形状与图3(c)和3(d)相比,不是很完整。这是因为当物体尺寸小于测量半步长,则方向梯度总能量为零;若物体尺寸等于或大于测量步长时,方向梯度总能量达到最大值并保持不变。
结合图3(d)和3(e),高分辨SAR图像中的人造目标,其形状和大小,都可以被较好的描述出来,完成了在复杂场景中的准确检测,为后续的识别处理等奠定了基础。
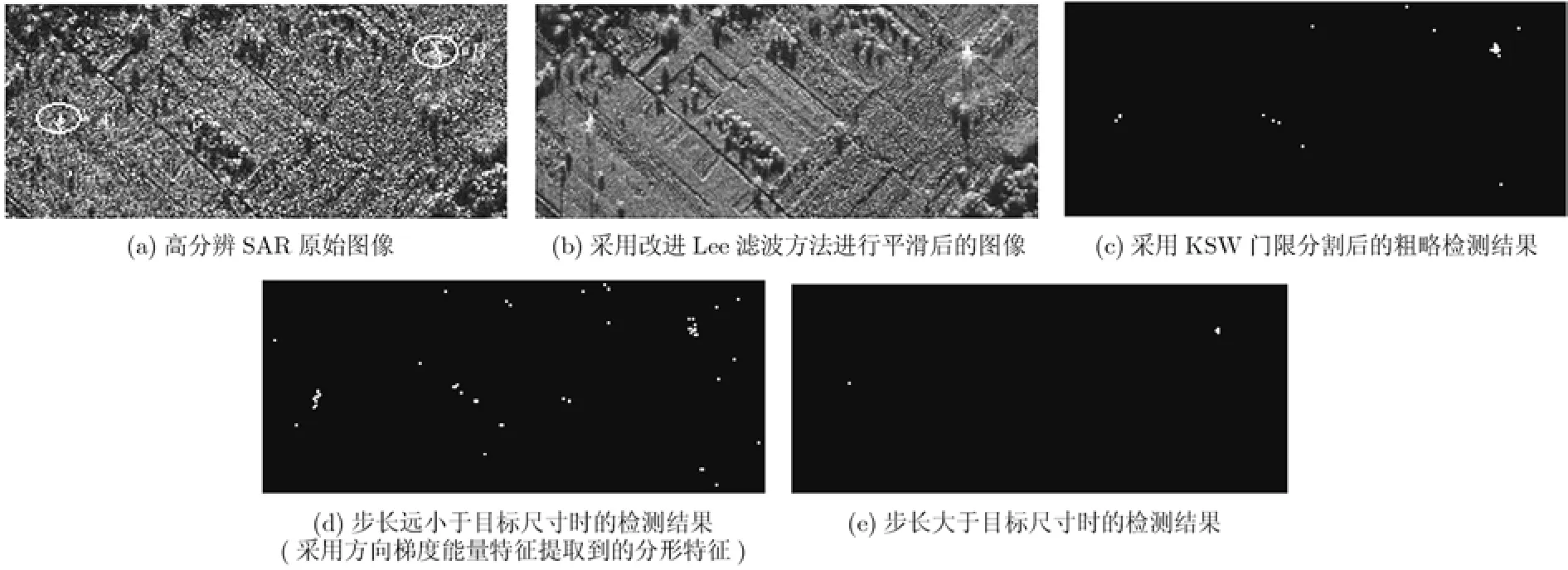
图3 实验结果
6 结论
本文通过完整的图像处理过程,对复杂地物背景下高分辨 SAR图像中存在的人造目标进行了准确的识别。首先,本文充分利用图像熵信息,对已有的Lee滤波算法进行改进,使得图像得到平滑的同时,细节和邻域特征等信息都得到了很好的保持,这种方法也可以在其它的图像平滑处理中借鉴和使用,具有一定的推广性;其次,本文采用方向能量梯度进行分形特征的提取,通过改变测量尺寸,对目标的形状和大小都进行了较好的描述,实现对高分辨复杂地物场景中人造目标的准确检测。实测的高分辨 SAR图像处理结果验证了本文算法的有效性,该目标检测算法对实际的工程应用具有一定的理论参考性。
[1] Conte E, De Maio A, and Ricci G. CFAR detection of distributed targets in non-Gaussian disturbance[J].IEEE Transactions on Aerospace and Electronic Systems, 2002,38(2): 612-621.
[2] 贾承丽,周晓光,计科峰,匡纲要. 复杂SAR场景中机场跑道的提取. 信号处理, 2007, 23(3): 374-378.Jia Cheng-li, Zhou Xiao-guang, Ji Ke-feng, and Kuang Gang-yao. Extraction of runways in complex synthetic aperture radar images.Signal Processing, 2007, 23(3):374-378.
[3] 戴光照, 张荣. 高分辨率 SAR图像中的桥梁识别方法研究.遥感学报, 2007, 11(2): 177-184.Dai Guang-zhao and Zhang Rong. A study of bridge recognition in high resolution SAR images.Journal of Remote Sensing, 2007, 11(2): 177-184.
[4] 种劲松,朱敏慧. 高分辨率合成孔径雷达图像舰船检测方法.测试技术学报. 2003, 17(1): 15-18.Chong Jin-song and Zhu Min-hui. Ship detection method of high-resolution SAR imagery.Journal of Test and Measurement Technology, 2003, 17(1): 15-18.
[5] Lee J S. A simple speckle smoothing algorithm for synthetic aperture radar images.IEEE Transation on System, Man,and Cybernetics, 1983, 13(1): 85-89.
[6] Duda R O. Pattern Recognition and Image Processing[M].Chichester, Horwood Publishing, 1998: 266-306.
[7] 谢明,李文博,罗代升. SAR图像目标的方向梯度能量分形特征研究. 光电工程, 2008, 35(4): 84-90.Xie Ming, Li Wen-bo, and Luo Dai-sheng. Directed gradient power fractal features of SAR image objects.Opto-Electronic Engineering, 2008, 35(4): 84-90.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 06:02:26
少儿科学周刊·儿童版(2021年20期)2021-12-11 06:26:47
中国西部(2021年4期)2021-11-04 08:57:32
发明与创新(2021年17期)2021-07-05 15:32:36
动漫星空(兴趣百科)(2020年11期)2020-11-09 05:42:58
学生天地(2020年29期)2020-06-09 03:11:00
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
趣味(数学)(2019年12期)2019-04-13 00:29:04
作文大王·中高年级(2018年7期)2018-08-18 09:23:04
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:36