
动态GPS接收机载波多普勒分析及环路跟踪性能实验研究
2010-05-18 06:35李杰申强唐婉玲赵鸿娟彭洪生
北京理工大学学报 2010年2期
李杰, 申强,唐婉玲,赵鸿娟,彭洪生
(1.北京理工大学 机电工程与控制国家重点实验室, 北京 100081;2.西安东方集团有限公司设计二所, 陕西,西安 710043)
载波跟踪环路是影响GPS接收机动态性能的关键环节,目前国内外对载体高速度动态条件下的载波跟踪环路性能进行了较多研究,也给出了有效的解决方案. 但对于既有高速度又具有较高加速度的炮弹弹道对接收机载波跟踪环路影响的研究还比较少[1-3]. 作者以SPIRENT信号模拟器为主要手段,通过实验对各种动态条件尤其是炮弹弹道环境下载波多普勒及其变化率进行分析,并对常见的几种载波跟踪环路的跟踪性能进行分析.
1 各种条件下的载波多普勒频移
1.1 静态条件下的载波多普勒频移
为证明用SIPRENT卫星信号模拟器分析各种条件下的载波多普勒频移的可行性,分析静态条件下的载波多普勒频率及其变化[4]. 图1为8颗可见卫星在载体静止时由于卫星运动所引起的多普勒频移,其值在±4kHz之间. 图2为9号卫星信号多普勒频移局部放大图,由图2可见,载波多普勒频移变化率小于0.5Hz/s.

图2 9号卫星静态条件下的载波多普勒频移放大图
1.2 匀速运动条件下的载波多普勒频移
图3为载体相对于9号卫星以1km/s的速度匀速运动引起的载波多普勒频移. 单纯由载体运动引起的多普勒频移变化率约为0.1Hz/s,由于典型炮弹的飞行速度不会超过1km/s,因此飞行速度对载波跟踪环路的影响可以忽略不计.

图3 匀速运动情况下的载波多普勒频移
1.3 加速度条件下的载波多普勒频移
当载体做匀加速度运动且加速度为40g时,其多普勒变化率大约为1.3kHz/s. 如图4所示. 这是炮弹弹道环境下接收机载波跟踪环路设计必须要考虑的因素.
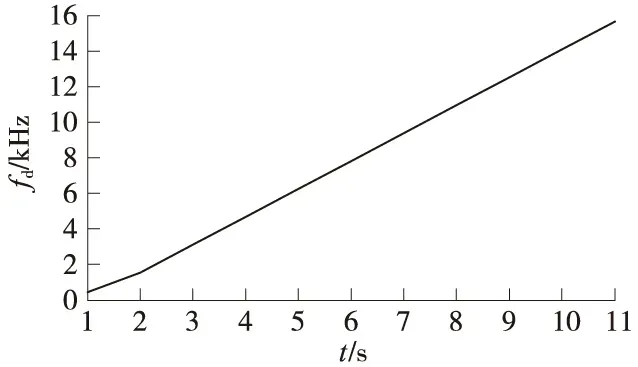
图4 匀加速情况下的载波多普勒频移
1.4 炮弹外弹道环境下的载波多普勒频移
某型号榴弹整个飞行过程中,其最高速度约为900m/s,加速度范围为-10g~10g,加速度变化率可达4g/s. 其飞行过程中所引起的载波多普勒频移如图5所示,实验表明,最大多普勒频率变化率约为500Hz/s.
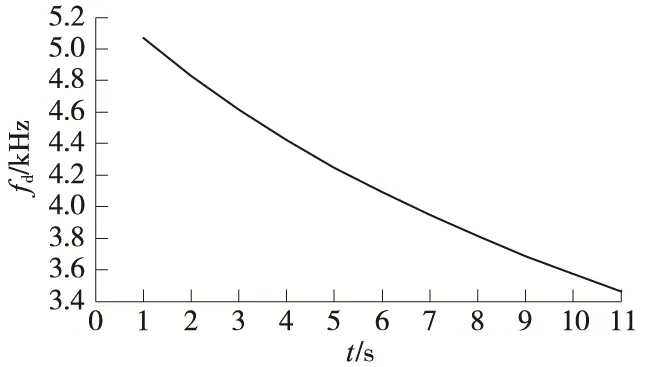
图5 弹道环境下的载波多普勒频移
2 各种动态条件下载波多普勒对不同跟踪环路的影响
采用软件接收机分别使用不同跟踪环路(即2阶PLL、3阶PLL、1阶FLL辅助2阶PLL、2阶FLL辅助3阶FLL)对上述动态条件下的卫星信号进行跟踪,以便得到不同动态条件对跟踪环路性能的要求[5-6].
2.1 匀速运动对各种跟踪环路的影响
当载体以1 km/s的速度匀速运动时,单独用2阶以上锁相环路就可以对其进行正常跟踪,由软件接收机解调出的数据及跟踪过程中的多普勒频移fd分别如图6、图7所示.
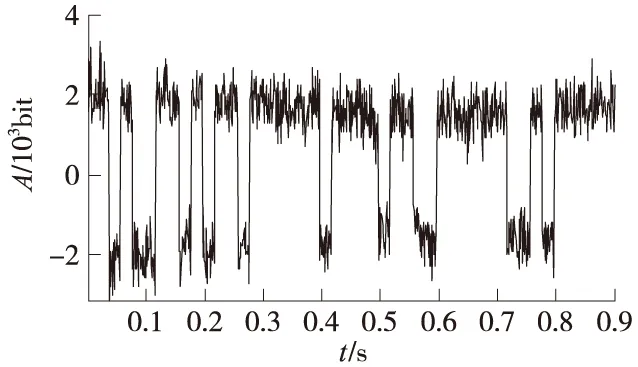
图6 2阶PLL解调数据(匀速)
2.2 加速度对跟踪环路的影响
载体加速度小于30g时,2阶锁相环仍然可以正常跟踪. 但当载体加速度大于30g时,2阶锁相环不能正常进行跟踪. 3阶锁相环后则可正常跟踪,解调数据及多普勒频移分别如图8、图9所示. 加速度一直增加到40g时,3阶锁相环失锁. 再改用1阶锁频环辅助2阶锁相环,则能正常跟踪.
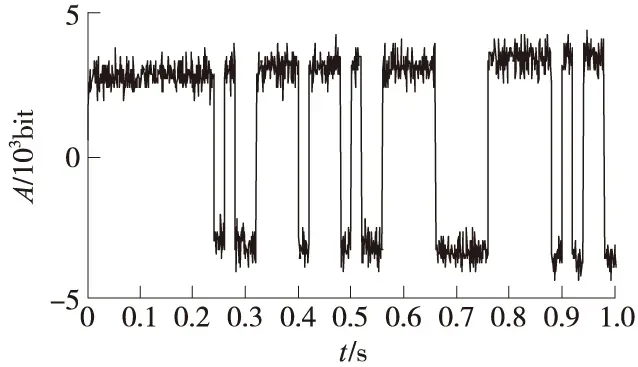
图8 三阶PLL解调数据(30g)
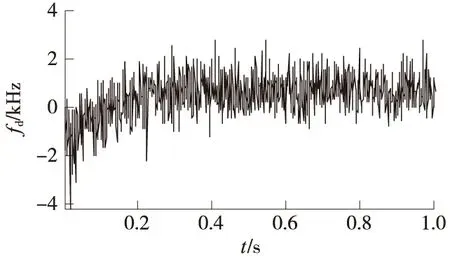
图9 3阶PLL鉴相器输出多普勒频移(30g)
2.3 炮弹弹道环境对跟踪环路的影响
对炮弹弹道环境,仅用PLL无法对卫星信号进行正常跟踪. 用1阶锁频环辅助2阶锁相环验证弹道轨迹时,仅有1路正常工作,能够解调出导航数据,其它几路均不能正常工作. 用2阶锁频环辅助3阶锁相环对同一弹道进行跟踪,结果能跟踪2路卫星信号.
综上,各种动态条件下不同跟踪环路的跟踪结果如表1所示.
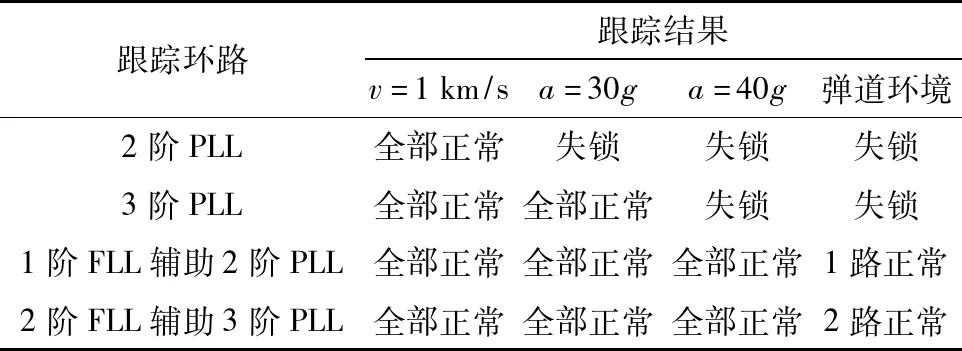
表1 各种动态条件下不同跟踪环路的跟踪结果
3 动态接收机跟踪环路的改进
据上述分析可知,GPS接收机天线随载体运动时接收到的信号会发生很大变化,载波多普勒频移的变化率会对接收机捕获和跟踪产生较大影响. 常规载波跟踪环路仅能跟踪几路卫星信号,无法达到定位要求. 因此可以考虑预先用获知的多普勒频移变化规律对跟踪环路进行辅助控制以提高对卫星信号的跟踪性能[7].
炮弹弹道条件下的接收机跟踪环路改进方案如图10所示. 在炮弹发射之前,先将加速度数据输入接收机存储器中,在接收机工作时可根据弹丸飞行时刻查表并算出相应的载波频率变化率. 环路失锁时,用上一次跟踪获得的载波频率加上通过查表计算得到的多普勒频率变化量,直接控制数控振荡器,使环路达到快速跟踪锁定状态.
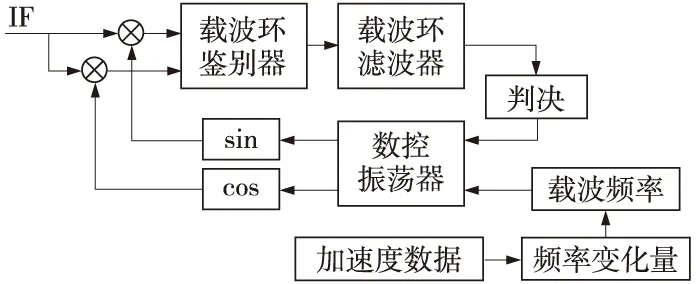
图10 改进后的跟踪环路原理图
4 结 论
采用 SPIRENT卫星信号模拟器分析了各种动态条件下的载波多普勒频移及其变化率,并验证了这些动态条件下载波多普勒频移对不同跟踪环路(1阶PLL,2阶PLL,1阶FLL辅助2阶PLL,2阶FLL辅助3阶FLL)的影响. 针对弹道条件下多数卫星信号导航接收机跟踪环路失锁的情况,提出了动态接收机跟踪环路的改进方案,该方案对炮弹用接收机设计具有一定的借鉴意义.
参考文献:
[1]胡小平,于海亮,唐康华.基于软件GPS接收机的高动态跟踪环路设计[J].中国惯性技术学报,2007,15(6):682-685.
Hu Xiaoping, Yu Hailiang, Tang Kanghua. Design of software-based GPS receiver high dynamic tracking loop[J]. Journal of Chinese Inertial Technology, 2007,15(6):682-685. (in Chinese)
[2]Elliott D K, Christopher J H. Understanding GPS principles and applications[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2007.
[3]邱致和,王万义.GPS原理与应用[M].北京:电子工业出版社,2002.
Qiu Zhihe, Wang Wanyi. GPS principles and applications[M]. Beijing: Publishing House of Electronics Industry, 2002. (in Chinese)
[4]申强,葛腼,张冀兴,等.一种GPS弹道辨识方法的精度仿真分析[J].北京理工大学学报,2009,29(2):100-102.
Shen Qiang, Ge Mian, Zhang Jixing, et al. Analysis on precision of a GPS-based trajectory identification method by simulation[J]. Transactions of Beijing Institute of Technology, 2009,29(2):100-102. (in Chinese)
[5]James H D. Advanced spinning-vehicle navigation—a new technique in navigation of munition[C]∥ION 57th Annual Meeting/CIGTF 20th Biennial Guidance Test Symposium. Albuquerque: [s.n.], 2001.
[6]Yamaguchi S, Tanaka T. GPS standard positioning using Kalman filte[C]∥SICE-ICASE International Joint Conference 2006. Busan, Korea: [s.n.], 2006:778-801.
[7]申强,王猛,李东光.旋转条件GPS接收信号频率和相位变化分析[J].北京理工大学学报,2009,29(1):35-37.
Shen Qiang, Wang Meng, Li Dongguang. Analysis of GPS received signal frequency and phase variation under the condition of rotation[J]. Transactions of Beijing Institute of Technology, 2009,29(1):35-37. (in Chinese)
北京理工大学学报2010年2期