
STM系统结构设计与扫描接口智能化的研究
2010-05-10 11:04杨一平张建明
制造业自动化 2010年8期
杨一平,张 平 ,张建明
(1. 重庆大学 生物工程学院,重庆 400030;2. 重庆大学 ICT 研究中心,重庆 400030)
0 引言
纳米材料制备和应用研究中所产生的纳米技术很可能成为下一世纪前20年的主导技术[1,2]。扫描隧道显微镜是检测纳米材料的重要手段,他的出现,使人类第一次能够实时的观察单个原子在物质表面的排列状态和与表面电子行为有关的物理化学性质,并为纳米级技术奠定了基础,被国际科学界公认为八十年代世界十大发明成就之一。
STM所具有的独特优点可归纳为以下五点[3]:
1)具有原子级高分辨率。STM在平等和垂直样品表面方向的分辨率分别可达到0.1nm和0.01nm,即可分辨出单个原子;
2)时地得到在实空间中表面的三维图像,可用于具有周期性或不具备周期性表面结构研究。这种实时观测的性能可用于表面扩散等动态过程的研究;
3)观察单个原子层的局部表面结构,而不是体相或整个表面的平均性质。因而可直接观察到表面缺陷、表面重构、表面吸附体的形态和位置,以及由吸附体引起的表面重构等等。另外,还可以对单个原子,分子进行加工;
4)真空大气常温等不同环境下工作,甚至可将样品浸在水或其他液体中,不需要特别的制样技术,并且探测过程对样品无损伤。这些特点特别适用于研究生物样品和不同实验条件下对样品表面的评价;
5)扫描隧道谱(STS)可以得到有关表面电子结构的信息。
1 STM基本工作原理
扫描隧道显微镜的基本工作原理如图1所示。图中A为具有原子尺度的针尖,B为被分析样品。STM工作时,在样品和针尖间加一定电压,当样品与针尖的距离小于一定值时,由于量子隧道效应,样品和针尖间产生隧道电流。

图1 扫描隧道显微镜的工作原理示意图

式中,I表示隧道电流,d表示样品与针尖间的距离道条件下,k与有效局部功函数φ有关,可近似表示为:

上式中,mm为电子质量,φ为有效局部功函数,h为普朗克常数。典型条件下,φ近似为4eV,K=10nm-1。由式(1)得,当间隙每增加0.1nm时,隧道隧道电流I可更准确表达为:
上式中,Mµv表示隧道矩阵元,发f(Eµ)为费米函数,V为跨越能垒的电压,Eµ表示状
态µ的能量,µ、v表示针尖和样品表面的所有状态。Mµv可表示为:

上式中,Ψ为波函数。由此可见,隧道电流I并非表面起伏的简单函数,他表征样品和针尖电子波函数的重叠程度。可将隧道电流I与针尖和样品之间距离d以及平均功函数Φ之间的关系表示为:

其中 为针根据扫描过程中针尖与样品相对运动的不同,可将STM的工作原理分为恒电流模式图1(a)和恒高度模式图1(b)。若控制样品和针尖间的距离不变,如图1(a),则当针尖在样品表面扫描时,由于样品表面高低起伏,势必引起隧道电流变化,此时通过一定的电子反馈系统,驱动针尖随样品高低变化而做升降运动,以确保针尖与样品间的距离保持不变,此时针尖在样品表面扫描时的运动轨迹如图1(a)中虚线所示,直接反应了样品表面态密度的分布,而在一定条件下,样品的表面态密度与样品表面的高低起伏程度有关。此即恒电流模式。
若控制针尖在样品表面某一水平面上扫描,针尖的运动轨迹如图1(b)所示,则随着样品表面高低起伏,隧道电流不断变化,通过记录隧道电流的变化,可得到样品表面的形貌图,此即恒高度模式。
2 STM系统结构的设计
STM仪器主要由三部分组成,即镜体部分、数据采集与扫描系统和计算机工作站部分。三部分协调稳定的工作是获得良好图像的关键[4]。
2.1 镜体
STM镜体主要由扫描探针组件、样品架、步进电机和粗逼进机构等组成,扫描探针组件采用钛酸锆酸铅压电陶瓷材料(简称PZT)做成的单管扫描器,为使探针更换方便,可将探针直接插入压电陶瓷管中的针管内。
对整个镜体部分来讲,由于工作时针尖与样品间距一般小于1nm,同时隧道电流的大小与隧道距离成指数关系,因而任何微小的振动,都会对仪器的稳定性产生影响。一般来讲由振动所引起的隧道间距变化必须小于0.005nm,STM才能保持良好的工作状态。在设计上采用弹簧悬吊减震系统,整个镜体用弹簧悬挂起来,用以隔绝外界的振动和干扰。
2.2 数据采集系统的设计
由于STM是一个纳米级的随动系统,因而其电路设计应与机械设计紧密结合,设计的STM的电路原理如图2所示,主要由扫描电路,反馈控制回路和步进电机电路等几部分组成。由计算产生的两组数字信号经过数模转换形成两组相关的阶跃波电压信号,分别作为X和Y方向扫描电压的源信号。信号的频率连续可调、转化后的信号经高压放大器放大后分别形成压电陶瓷管在X和Y方向上的扫描驱动电压Vx和Vy,同时在X和Y扫描电压上叠加一可调的直流偏置电压,用来在较大范围内搜索和确定较为合适的扫描区域,两者在不超过极限值的范围内相互独立可调。在扫描完一幅图像时,针尖会返回到起始位置,开始对同一区域进行下一次扫描。
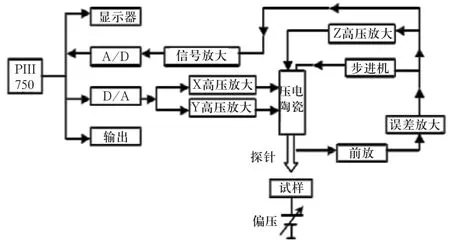
图2 STM电路原理
在恒定电流扫描模式中,隧道距离的设定是通过将隧道电流与预设电流进行比较,然后通过一个正反馈回路来保持针尖扫描时所设定的隧道间隙不变,其主要由前置放大器、误差放大器、Z高压放大器等几部分组成。其中,误差放大器是整个STM反馈控制系统的核心部分。前置放大器的作用是将nA级的隧道电流转换成mV级的电压信号。由于前置放大器的性能对整个仪器性能的影响很大,因而要求他具有高精度、低漂移、低噪音等电路性能。
2.3 计算机控制系统
为使STM方便、有效、精确的工作,计算机控制系统是必不可少的。计算机控制系统的主要任务是协调控制、数据采集、图像存储和显示以及图像处理等。整个系统的软件主要由C++语言来编写,同时考虑到运算速度和显示速度等的关系,部分程度由汇编语言编写。因为A/D卡的转换的位数不仅影响模拟量转换成数字的精度,还会进一步影响到后面的数据处理。在电路中先对被测信号进行一定的处理,使有用信号基本充满ADC量程,然后经A/D转换进入计算机,这样就有效的利用ADC。从计算机经D/A变换输出的扫描信号为连续的阶梯波,当沿X方向的电压改变一个阶梯,PZT带动针尖在X方向移动一步,计算机便采集到一个数据,当X方向移256步并复位后,Y扫描信号改变一个阶梯开始下一行扫描,当Y方向扫完256步并复位后,扫描电路便完成了一个周期的操作。同时也得到了一幅图像的256×256个数据点。在扫描过程中,采集软件把采集到的数据用灰度和扫描线的方式在显示器上实时的显示出来。
2.4 STM扫描电路智能化的设计

图3 倒T型电阻网络D/A转换器
对扫描电路进行智能化研究,是对STM仪器整体智能化中较重要的一环。因此,首先对扫描电路有一个简单的了解。扫描电压是由计算机编程控制,通过D/A转换来输出至X和Y扫描电压放大器,由放大器输出的信号即为加压电陶瓷上的扫描电压信号。从计算机经D/A变换输出的扫描信号为连续的阶梯波,当沿X方向的电压改变一个阶梯,PZT带动针尖在X方向移动一步,计算机便采集到一个数据,当X方向移动256步并复位后,Y扫描信号改变一个阶梯开始下一行扫描,当Y方向扫完256步并复位后,扫描电路便完成了一个周期的操作。同时也得到了一幅图像的256×256个数据点。
为避免这一误差并进一步提高转换速度,可采用图3的倒T型DAC。

这个电路突出特点是速度比较快,而且动态过程中V0的尖峰脉冲很小。这是因为各支路的电流都直接接到了运放的输入端,因此他们之间不存在传输时间差,从而有效地减小了动态误差,提高了转换速度。
在STM扫描电压的智能化设计中,使用了两块D/A转换卡。首先,给第一块十位D/A转换卡输入一个参考电压源,利用计算机控制系统(CPU)中的编程控制,将数字信号转换为5000mV的标准输出电压。接着该电压信号输入第二块十位D/A转换卡的参考电源处,利用D/A转换卡的电阻译码网络,通过编程控制,就可在5000mV的电压内任意选择电压的大小,即在电压范围(0~5000mV)以内,均可精确的输出所需要的电压给X(Y)扫描电路,改变探针在扫描范围内的X或Y方向的扫描区域,获得不同扫描范围内的扫描图像,有利于更好分析各种材料表面形貌和结构的真实信息。
3 采集软件设计
采集软件主要由九部分组成,各个部分并不是相互独立的,必需相互之间严密的配合才能使STM扫描出精美的图像。图4是软件工作的关系框图,从中可看出软件各部分是怎样配合工作的。
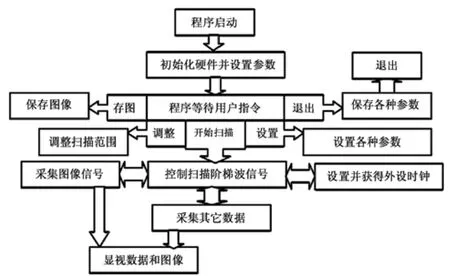
图4 运行软件的流程图
在采集软件设计中,控制扫描阶梯波信号部分应是程序的核心部分,因为如果没有他给扫描遂道显微镜的压电陶瓷送给恒稳的扫描电压,压电陶瓷上头的探针的动作将是混乱的,扫描遂道显微镜会无法正常的工作,外设时钟是为控制扫描阶梯波信号服务的,能使他发出有严格周期率的锯齿波。
随着探针的移动,样品表面形貌的高度会通过相应的遂道电流转换传到模数转换器(ADC)接口,计算机程序将信号读到计算机内存,进行进一步的处理。
4 结论
扫描遂道显微镜是通过计算机来控制他的扫描范围的,利用DAC里的倒T网阻来完成扫描范围的控制,采集程序只负责把相应的控制字送给相应的DA通道,硬件会自动完成设定。通过硬件电路和软件设计,获取了不同材质的数据,经过软件处理最终得到的各种材质的STM表面三维形貌图。
[1] 刘安伟,吉贵军.扫描隧道显微镜电压脉冲法加工产生纳米结构的研究[J].自然科学进展,1999,4:320-324.
[2] 吴世法,姚骏恩.光子扫描隧道显微镜的进展[J].光学学报,1998,2:191-198.
[3] 白春礼.扫描隧道显微镜技术及其应用[M].上海科技出版社,1992.
[4] 方鸿生,王家军,等,材料科学中的扫描隧道显微镜[M].科技出版社,1993.
[5] 姜卜香,等.电路与系统理论[M].高等教育出版社,1987.
[6] 何斌,马天予,等.Visual C++数字图像处理[M].人民邮电出版社.
[7] 周长发.图像处理编程[M].电子工业出版社,2002.
猜你喜欢
天天爱科学(2022年4期)2022-11-08
计量学报(2022年4期)2022-05-26
装备制造技术(2020年1期)2020-12-25
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
小学科学(学生版)(2019年11期)2019-12-09
电子制作(2019年14期)2019-08-20
少年文艺·开心阅读作文(2017年7期)2017-08-05
滇池(2017年5期)2017-05-19
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
中国与非洲(法文版)(2015年4期)2015-11-09
