基于遗传算法的交叉口信号配时多目标优化*
2010-04-12 08:03:06高孝洪
武汉理工大学学报(交通科学与工程版) 2010年4期
张 本 商 蕾 高孝洪
(武汉理工大学能源与动力工程学院 武汉 430063)
城市交通问题中50%~80%产生于交叉口及其周围地点,机动车在市区有1/3时间消耗在信号交叉口上,80%~90%的延误时间由信号控制交叉口造成[1].通过对信号灯的优化控制可以提高运行效率、减少延误时间、避免交通拥堵、减少空气污染和环境破坏.但是,目前对交叉路口交通控制的研究大都是以交通延误,排队长度等纯交通学指标作为研究目标,而很少考虑到环境指标、经济学指标和其他辅助指标.本文从减少交通延误、降低交通排放的多目标角度出发,在城市交通微观仿真模型和IVE机动车排放模型的基础上,建立相应的遗传算法模型,求解多目标优化问题.
1 交叉口的延误与排放问题
交叉口信号灯的设置使得车流成为间断流,机动车通过交叉口时,经常需要减速、怠速(或停车)、加速,由此不仅使车辆产生一定的延误,而且研究表明[2]:由于机动车运行工况发生变化,会导致车辆的排放因子发生改变,产生比在无交叉口路段行驶时多得多的尾气排放.因此,交叉口的车辆延误(包括停车次数)与尾气排放存在着一定的相关关系,具有变化的一致性,然而却不是线性的变化关系.2001年,北卡州立大学的Frey在实验研究中[3]证明了这一点:相同车辆行驶同一路段时,平均速度相同,而排放却有可能不同.原因是相同的平均速度可能有不同的加减速和怠速比例,并由此导致尾气排放量的不同.
目前,在满足交通需求的条件下,减少机动车尾气排放和燃油消耗,改善交叉口环境越来越成为城市交通信号控制的追求目标,也是未来交通信号控制研究开发的一个主要趋势.由于交通延误和尾气排放之间并不是一个线性的关系,所以在交通信号控制设计中,人们已经开始将多目标优化问题纳入其中.在交通信号控制多目标优化设计中,往往需要根据实际情况对在各个子目标最优值之间进行协调,互相做出一些“让步”,以便取得整体最优方案.
2 多目标遗传算法模型
交通系统本身就是一个随机性、离散的非线性系统,采用传统的优化方法往往无法满足其要求.遗传算法已广泛地应用到交通运输领域及多目标优化问题当中[4-5],如多目标加权法、层次优化法、Pareto排序和竞争方法以及目标规划方法等,其中以加权法最为普遍.然而在交通信号控制设计中,不同交通情况下,各子目标的权重是不相同的.例如,在饱和度较大的情况下,优先考虑的仍然是减少延误,提高通行能力的问题,而尾气排放就放到次要的位置.本文在不同的交通情况下,设置了不同的目标权重,在城市微观仿真模型和IVE排放模型的基础上建立基于遗传算法多目标优化的交通信号动态配时模型.
2.1 模型的组成和实现的步骤
本模型由2大部分组成,即带有IVE排放子模型的城市交通微观仿真模型和基于遗传算法的优化控制模型,其关系如图1所示.

图1 系统组成
具体实现步骤的流程图如图2所示.
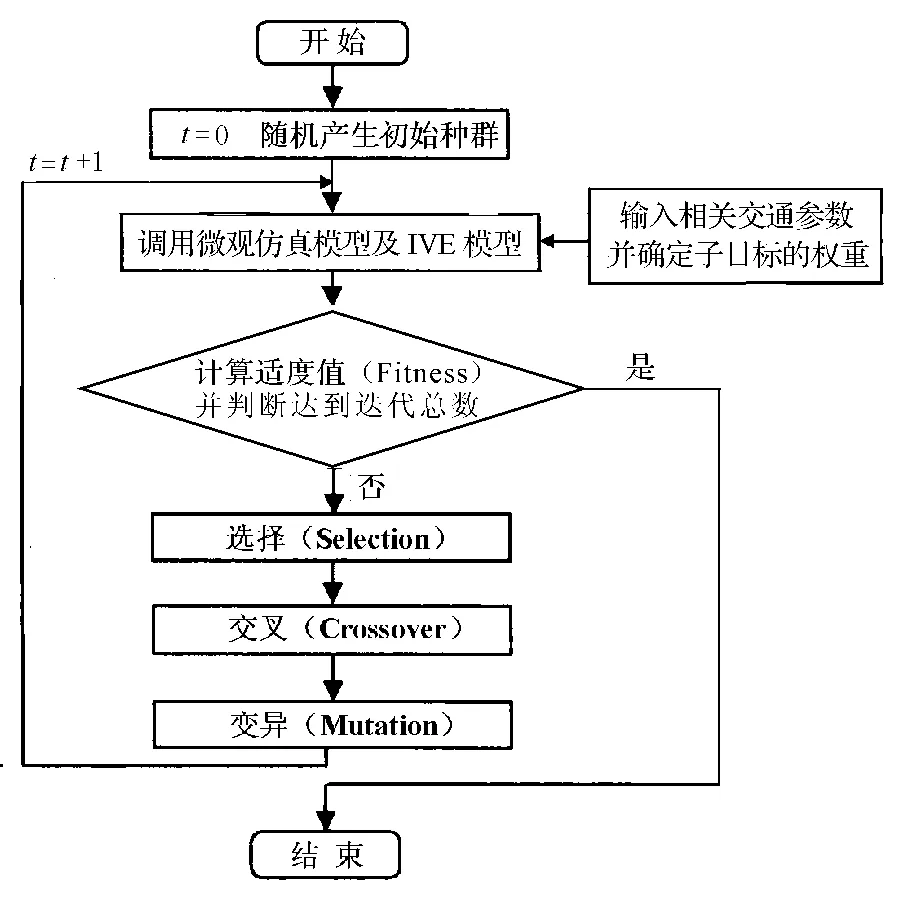
图2 基本流程图
城市交通微观交通仿真模型包括车辆的随机产生模型、换道及跟驰模型、动态路径选择及诱导模型、交叉口信号控制模型[6].
IVE 模型 (international vehicle emission model)是美国加州大学河边分校工程学院环境研究与技术中心(CE-CERT)、全球可持续体系研究组织(GSSR)和国际可持续研究中心(ISSRC)在美国环保局支持下,共同开发的便于发展中国家进行本地化处理的机动车排放模型[7].该模型引入 VSP(vehicle specific power)和 ES(engine stress)2种参数,考虑了瞬时运行工况变化对排放的影响,因而使该模型具有更大的准确性和适应性.本文调用IVE模型所带的BER和ADJ数据库并用C语言编写IVE模型中的排放污染物计算程序,使之成为仿真模型的一个子模型[8].
相关交通参数可以由微观仿真模型获得,也可以通过实地调查获得,做成数据库以备调用.各子目标的权重可以通过专家系统和实际情况确定.
2.2 遗传算法的设计
2.2.1 优化目标 假设要最大化i个目标函数,则

式中:wi微权重系数,表示各目标的重要度,满足=1;obji为各优化目标,如平均速度、停车次数、尾气排放量等.
在城市交通信号优化配时中的目标函数并非都是求其最大值.例如,对于延误、停车次数、尾气排放量等目标函数追求其最小值,而对于平均速度等目标函数则追求其最大值.因此如果是最小化目标函数,则需将其进行最大化的变换.此外,不同目标函数的单位和数量级都不相同,必须进行标准化.
2.2.2 编码 每一个体向量由需优化的参数组成,Xm={x1,x2,…,xn}.xi(i=1,…,n)表示交叉口各相绿灯的时长.因解空间为正整数,故而采用实数编码的原则,随机产生满足条件的种群个体.
2.2.3 选择 采用最常用的比率选择法.
2.2.4 交叉和变异 为了提高迭代速度,采用自适应的遗传算法.自适应的交叉率pc和变异率pm,其计算表达式为

式中:pc1=0.9;pc2=0.6;pm1=0.1;pm2=0.001;fmax,favg,f′,f分别为群体中最大的适度值、每代群体中的平均适度值、要交叉的2个个体中较大的适度值和要变异个体的适度值.
在本文中还实施了Keep The Best策略,这有助于遗传算法的收敛.其具体做法为:将第0代中得到的最优个体及其适度值保留起来;从第1代开始,将每一代中得到的最优个体和前一代的保留个体进行比较,如果刚得到的最优个体优于前一代保留个体,则它将成为当前代的保留个体,否则将前一代保留个体作当前代保留个体.
3 优化实例与分析
选取颇具特点的武汉市某信号灯交叉路口进行仿真优化研究.参数设置为:遗传算法的优化目标为车辆的平均速度和单位距离的CO排放量;由于仿真的是路口高峰小时段的交通情况,故子目标权重分别为0.95和0.05;最大进化代数和种群大小分别为100和50;交叉路口交通流分布如图3所示,相位分布及顺序如图4所示;交叉口各OD对的车辆到达率见表1,服从泊松分布.信号灯周期C为120s,各相位的绿灯时间约束为12<gi<60,右转不受限制.
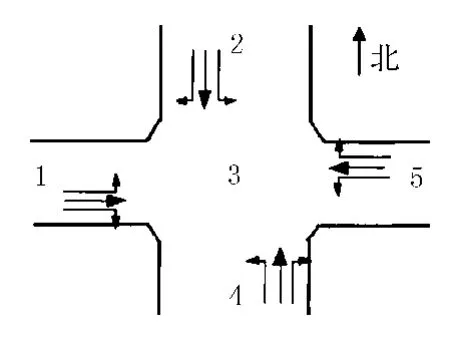
图3 交叉口交通流分布图

表1 路口高峰小时的车辆到达率
由遗传算法所计算的每一代适度值和平均适度值如图5所示,可以看出其在第9代左右即收敛至最大值,由此计算出每一代的车辆平均速度和单位距离的CO排放量见图6.
原配时方案各相绿灯时长为30s,周期为120s;经遗传算法优化后的配时方案为52,35,16,17s,周期时长不变.仿真时间为120s,离开路网的车辆由原来的1 482辆增加到1 546辆,通行能力提高3.4%;平均车速提高近10%,CO的排放量略有减少,见表2.

图5 历代适应度曲线

图6 历代平均速度和CO排放的曲线
在表2中可以得出以下结论.
1)在实施优化后,整个路口的平均速度得到了提高,通行能力增强,CO单位距离的排放量减少.
2)总的通行能力有所提高,大部分车道的在线车辆有所减少,说明拥堵现象有所减轻,但是部分车道的在线车辆数是增加的,这主要是因为优化是通过牺牲个别路口的通行能力,合理安排信号灯配时,使整个路口的通行能力提高.
3)右转车道的通行能力和在线车辆数在优化前后没有什么变化,这与右转车辆不受信号灯限制有关.在优化中,平均速度并不涵盖右转车辆,避免其对优化结果的影响.
4)由于本文是针对高峰小时的路口进行仿真,主要解决的是路口的通行能力,在目标权重中,平均速度的权重是0.95,因此可以看出单位距离的CO排放量并没有得到很大的改善,其减少量主要是平均速度增加的贡献.
4 结 束 语
本文提出了将遗传优化算法与微观交通仿真相结合,以平均速度和尾气排放量作为优化目标,对单路口的信号灯进行优化配时,来提高路口的通行能力并减少尾气污染.通过对一典型路口高峰小时的微观交通仿真研究,证实了采用遗传优化算法对路口的信号灯配时方案进行优化,能有效地提高路口的通行能力,并减少排放.
在本文中,仿真的对象是单路口,信号周期时长和相序也是固定不变的.下一步的工作是对交通干线及区域的信号控制进行优化,通过对区域信号的协调控制,提高路网的通行能力,减少区域的尾气排放.

表2 两种方案的对比
[1]刘 玥,杨晓光.多相位信号交叉口最优控制模型及其求解算法[J].交通与计算机,2004,22(2):12-15.
[2]Li Xiugang,Li Guoqiang,Pang Suseng,et al.Signal timing of intersections using integrated optimization of traffic quality,emissions and fuel consumption:A note[J].Transportation Research Part D,2004,9(5):401-407.
[3]Frey H C,Rouphail N M,Colyar J D.et al.Emissions reduction through better traffic management:An empirical evaluation based upon on-road measurements[R].Prepared for the North Carolina Department of Transportation,North Carolina,2001.
[4]王小平,曹立明.遗传算法理论、应用与软件实现[M].西安:西安交通大学出版社,2002.
[5]李瑞敏,陆化普.基于遗传算法的交通信号控制多目标优化[J].长安大学学报:自然科学版,2009,29(3):85-88.
[6]商 蕾,高孝洪.城市微观交通模型建模与仿真实现[J].武汉理工大学学报:交通与工程版,2003,27(4):499-502.
[7]IVE model user′s manual Version 1.1.1[M].California:University of California at Riverside,2004.
[8]Zhang Ben,Shang Lei,Chen Dan.A study on the traffic intersection vehicle emission base on urban microscopic traffic simulation model[C]//Proceedings of the 1st International Workshop on Education Technology and Computer Science (V2),Wuhan:ETCS 2009,2009:789-794.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:56
中学生数理化·八年级物理人教版(2020年9期)2020-11-16 01:17:58
铁道通信信号(2020年8期)2020-01-05 20:30:18
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:04
铁道通信信号(2019年1期)2019-01-16 00:45:15
铁道通信信号(2018年6期)2018-08-29 01:16:18
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
发明与创新(2016年34期)2016-08-22 03:00:54
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01