
多货罐化学品船液货罐体与支承结构的接触分析*
2010-04-03 02:00:50贺俊松刘志毅
船舶 2010年3期
孙 燕 洪 英 贺俊松 刘志毅
(1.浙江工业大学建筑工程学院 杭州 310014 2.中国船级社上海规范研究所 上海 200135)
多货罐化学品船液货罐体与支承结构的接触分析*
孙 燕1洪 英2贺俊松2刘志毅1
(1.浙江工业大学建筑工程学院 杭州 310014 2.中国船级社上海规范研究所 上海 200135)
化学品船;接触;有限元分析;直接约束法
介绍了有限元分析方法对接触问题进行求解的一般方法,应用大型有限元分析软件Marc进行多货罐化学品船液货罐体与支承结构的接触分析,研究了支撑结构的加强方式,为制定CCS《散装运输危险化学品船舶构造与设备规范》(2006)的补充检验要求,提供了依据。
刘志毅,男,硕士研究生,主要从事有限元接触分析及气囊下水安全性评估工作。
0 引 言
为了避免C型独立舱的化学品船因相邻船体结构的变形产生对液货罐体的影响,液货罐必须设计成不构成船体结构的组成部分,液货罐体以适当的多支点支承装置支持,使液货罐整体不与船体结构刚性连接。常规的C型独立舱的化学品船,液舱是倒卧在马鞍形的支承结构上,支承力大都可以化为液舱筒壁上的膜应力,这对于筒壁结构而言,是较为理想的受力状态,因此,该处的应力水平较低。近年来,船舶市场上出现了一种单个货舱内设置多个用于装载无机酸和碱液体货物的采用滚塑工艺制造的圆柱形塑钢复合液货罐(以下简称液货灌)的化学品船舶。而多货罐化学品船的罐体底部是直接搁坐在船底肋板上,受力状况不是太好,因此该处的局部应力较大。
通常,对于该处的连接,有限元分析是采用同节点或MPC的多点约束关系,其结果一般偏于保守。对于常规的液舱布置,由于该处的应力值较低,故影响不太大。但是对于多货罐化学品船的液舱布置,通过计算发现,该处的计算应力值非常大,因此必须采用更加精确的手段计算该处的应力,否则设计将会大大保守。
从力学分析角度看,罐体与支撑结构的关系是一种典型的接触问题。接触是边界条件高度非线性的复杂问题,需要准确追踪接触前多个物体的运动以及接触发生后这些物体之间的相互作用。运用数学物理模型,考虑复杂的边界条件及初始条件,很难求出在工程上有实际意义的解析解。但随着计算机的高速发展以及其性能价格比的提高,利用大型非线性有限元分析软件如Marc等进行多货罐化学品船液货罐体与支承结构的接触分析已成为可能。
1 有限元接触分析及其求解方法
数学上有很多有效的方法用于描述接触问题,其中被广泛运用的有拉格朗日乘子法、罚函数法和直接约束法。基于这三种算法,著名的非线性有限元软件Marc给出了处理接触问题的三种解决办法:基于拉格朗日乘子法或罚函数法的接触界面单元、基于罚函数法通过用户子程序来施加非线性弹簧以及基于直接约束的接触算法。直接约束法的实现过程是通过追踪物体(有限元中为节点)的运动轨迹,一旦探测出两节点距离小于接触容差即判断两点发生接触,随后便将接触所需的运动约束(法向约束,切向自由)和节点力(法向压力和切向摩擦力)作为边界条件施加在产生接触的节点上。利用这种方法来描述接触可以满足较高的精度要求,而且易于实现,具有可操作性。既不需要增加特殊的接触单元,也不涉及复杂的接触条件变化,不足之处在于,由于接触关系的变化会增加有限元模型的矩阵带宽,影响计算效率。当然,从计算机技术的角度来说,硬件技术的进步可以在一定程度上弥补这一缺陷。
基于直接约束的接触算法是解决所有接触问题的通用算法,特别是对大面积接触问题,以及事先无法预知接触发生区域的接触问题。Marc程序的接触体定义十分简洁,完全抛开了目前其他软件采用的定义接触单元或接触点对的繁杂过程,这是在处理接触问题时最常用的方法。
基于直接约束法的有限元接触分析与上面有限元分析法的步骤基本上是相同的,不同之处主要在于从确定边界条件到平衡方程组的求解是个反复的迭代过程,具体如图1所示。
1.1 接触探测
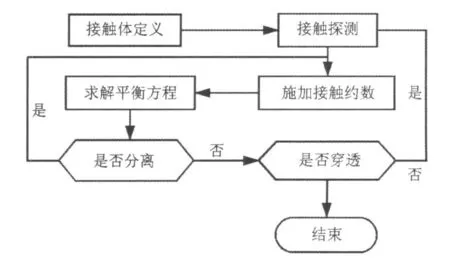
图1 接触示意图
接触探测是在每个增量步开始时,检查每个可能接触的节点的空间位置,看其是否位于某一接触区域,并且离该接触区域的距离足够近(小于某个接触容差)。对于二维变形接触体,接触区域是指表面单元的外边界,对于三维变形接触体,接触区域是指表面单元的外表面。对于刚性接触体,接触区域是指描述刚体外轮廓的曲线段或表面片。
1.2 探测方法
对于变形体与刚体接触分析,采用单边接触检查,即只检查变形体的节点。对于两个相互接触的变形体,采用双边接触检查即检查所有接触体上的可能接触节点。双边接触检查的计算精度较高,但计算时间较长,数据存储量也相应增加。
1.2.1 接触定义
理论上,节点恰好位于某个接触区域上时即认为发生接触,但在数值计算接触过程中,要精确描述节点恰好在一个接触区域是困难的。因此引入了一个接触距离容限,如果某一个节点的空间位置位于接触距离容限之内,就被当成与接触区域相接触,如图2所示。

图2 判断是否接触
1.2.2 穿透判断
在接触分析中,当在某一时间增量步t到t′(即t+Δt)内,如果A点从t时A(t)的移动到t′时的A(t′),如果A(t′)超出了接触段的接触距离容限即认为产生了穿透。当检测到发生穿透后,必须进一步细分该增量步:
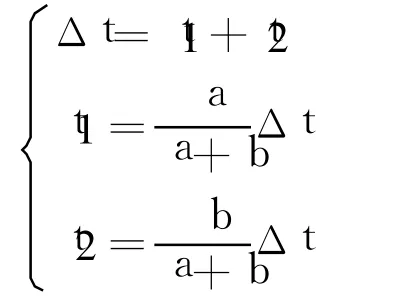
经过细分后,新的增量步内将不会发生穿透,如下图3所示。

图3 节点A发生了接触
1.3 施加接触约束
当有限元模型两接触体的节点距离小于接触容差时,即判断发生接触,随后便将接触所需的运动约束和节点力作为边界条件按图4所示的局部坐标系施加在产生接触的节点上。

图4 接触节点的局部坐标
1.4 模拟摩擦和分离
目前的有限元软件中,主要是用简化的理想模型来对摩擦进行数值模拟。比较常见的是滑动库仑摩擦模型、剪切摩擦模型和粘—滑摩擦模型等。已经与表面产生接触后的接触节点在后续的迭代或增量步中,由于外载荷作用或接触体之间的相互作用可能与接触面分离。由于在实际的数值计算中存在误差,往往设立一个最小分离力。当接触反力大于最小分离力时,才发生分离。当分离发生后,原来在变形体中接触反力产生的内应力必须重新分布,以适应分离后的无外力边界条件。
2 计算实例
2.1 计算模型
本文针对某一拥有27个独立液货罐的船长为57 m的多罐化学品船。采用三维有限元模型,选取化学品船的第一货舱区,舱段模型的纵向范围为1/2个货舱(X向),垂向范围为船体型深(Y向),舱段模型的横向范围船体型宽(Z向),有限元模型见图5。
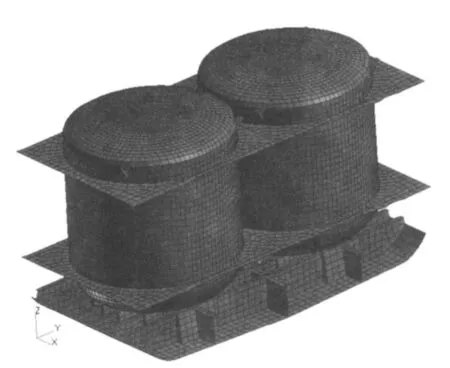
图5 计算模型示意图
利用Marc进行有限元分析时,接触的定义十分简洁。在定义模型时应当遵循如下接触定义顺序:
(1)先定义变形体,后定义刚体;
(2)在可变形体的接触中,应先定义较软的材料,后定义较硬的材料;
(3)两个网格疏密程度不一致的变形体接触时,先定义网格较细的,后定义网格较疏的;
(4)先定义几何形状凸的接触体,后定义几何形状凹的接触体;
(5)先定义体积较小的接触体,后定义体积较大的接触体。
在选项中选择子菜单定义:①接触体;②选择接触摩擦系数;③选择可以指明某一接触体将可能与另外的那些接触体或自身接触;④可以对接触距离容限进行人工设定,同时接触距离容限也可以在选项中的接触控制选项中定义。
对于接触问题,网格划分的级别越高,计算精度越高,接触部位网格尺寸与接触区域长度相差一个数量级时,计算结果较好、计算效率也较高。区内网格数量越少,计算结果误差越大,由于接触区域很小,如果直接将网格单元按接触尺寸划分,计算量之大将使计算无法完成。采用自动网格划分技术,只对局部接触单元进行网格细分,则能够保证计算的高效率、高精度完成,且接触区的应力应变情况一目了然,大大方便了问题的分析。
2.2 边界条件
模型的边界条件如表1所示。
本文将模型定义为分两个接触体,罐体为接触体一,其他部分为接触体二。
2.3 载荷
按照《规范》,计算包含了下述的载荷及组合工况:
(1)货物载荷——液货舱和液货重量,应计及船舶运动引起的惯性力;
(2)结构自重——模型中的船体结构重量,可由计算程序自动算出;
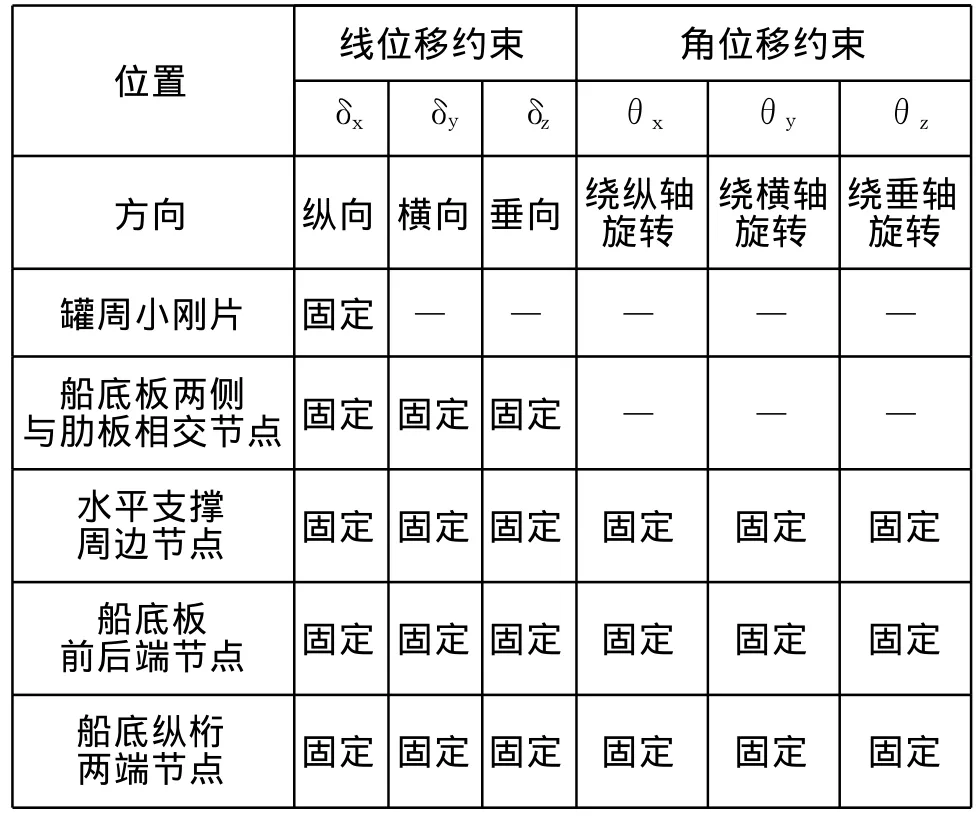
表1 模型的边界条件
(3)海水压力——按CCS《油船结构强度直接计算指南》第4章第4.2节,可仅计静水压力;
(4)调平附加载荷——货物载荷加上结构自重与浮力之差而设,施与船底板,并与浮力叠加;
(5)液货和货物重量的/2向前冲力和/4向后冲力;
(6)船体静横倾角30°姿态时,各有效质量沿倾斜面产生的重力分量,取/2重力值。
本文是低压容器,不需压力试验,只有6个工况,见表2,从上至下依次为工况1~工况6。

表2 载荷工况
2.4 计算结果及应力云图
采用Marc程序的接触算法,获得各种工况的最大应力如下表,图6~图8为该船最大相当的应力云图。
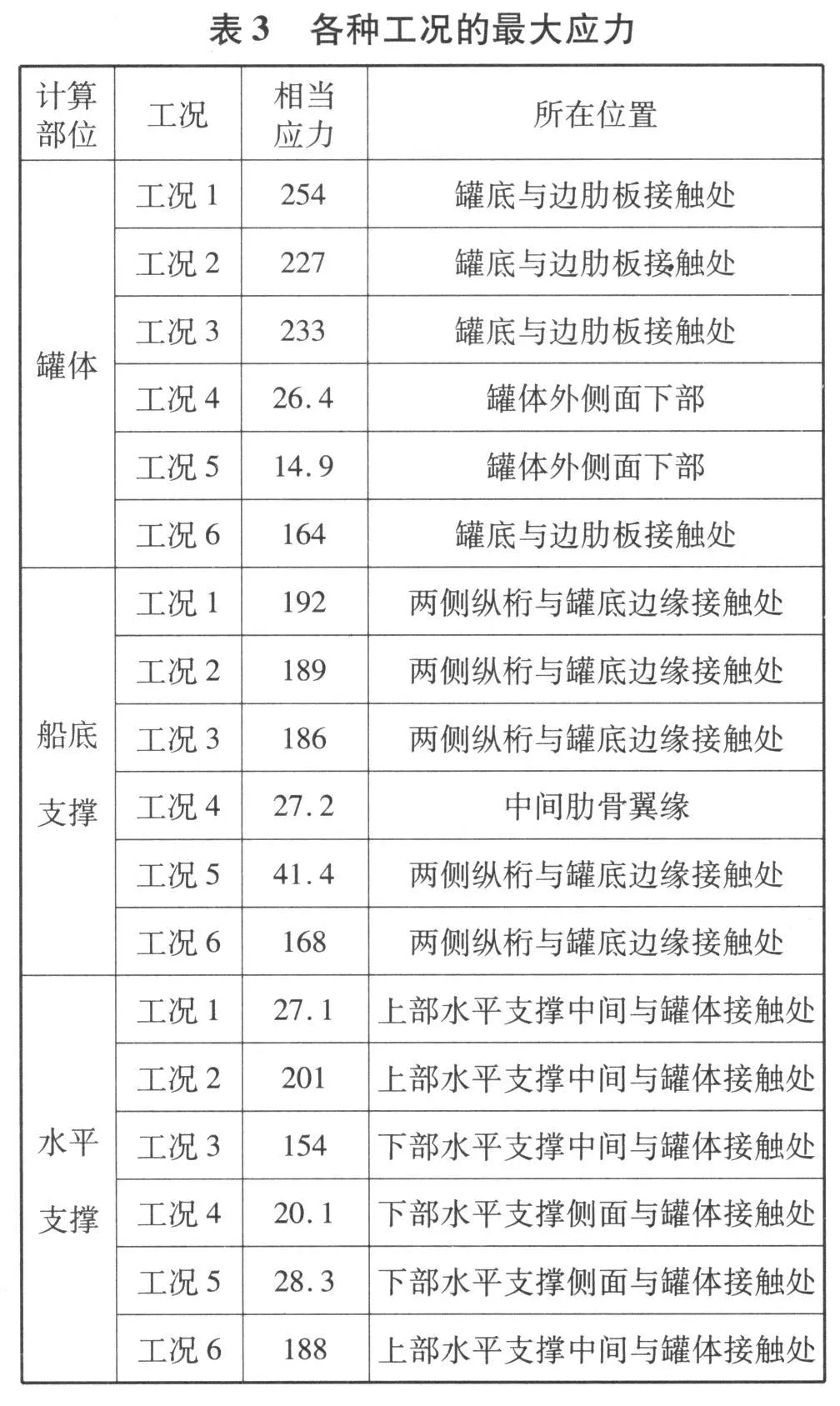
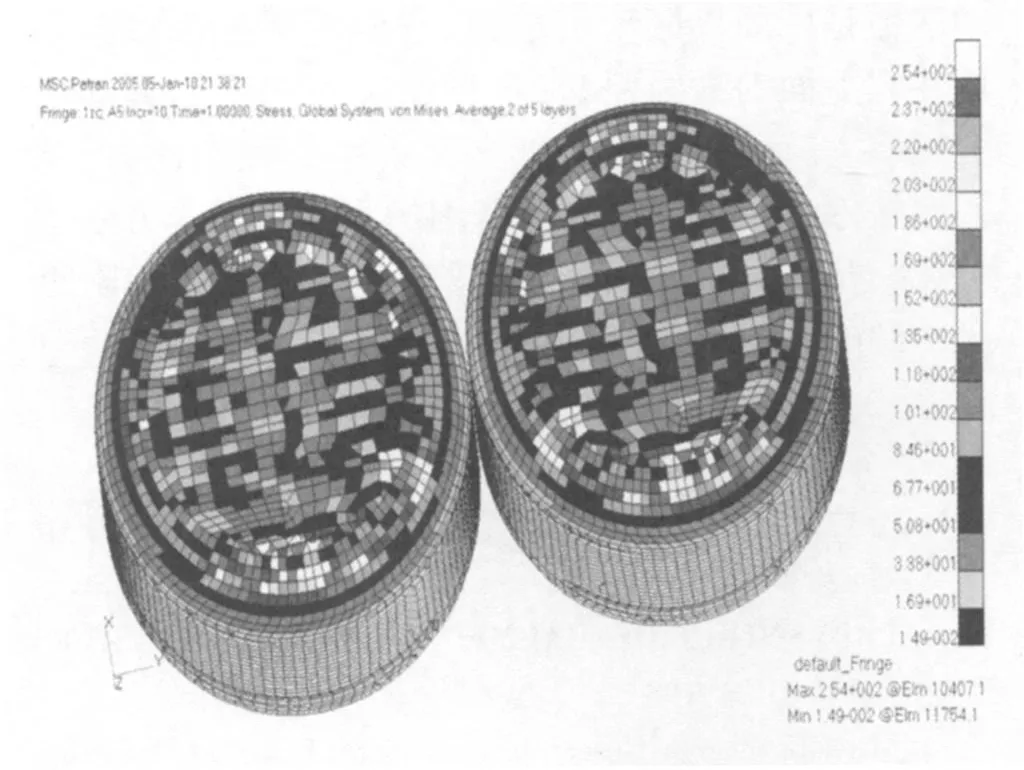
图6 罐体最大相当应力图(工况1)

图7 船体支撑最大相当应力图(工况1)

图8 水平支撑最大相当应力图(工况6)
由表3可以看出,罐体最大相当应力出现在罐体底部远离船头方向,所在的工况是工况1。究其原因,可能是由于罐体受到指向船头方向的惯性力,罐底应力最大处被抬起,与支撑分离,导致支撑部分失效;罐体受到较大的向下惯性力,罐底应力最大处与支撑分离所造成的悬臂状态使此处应力显著增大;
其次,水平支撑的最大相当应力出现在工况6,这是由于虽然工况1、2、3中向下的惯性力很大,但是水平支撑几乎不参与,而工况6中的侧向力较其余工况的侧向力大,因此水平支撑最大应力出现在工况6符合实际情况;
最后,船底支撑的最大相当应力出现在工况1,位置也与罐底最大应力处对应,符合力的相互作用规律。
3 结 语
本文应用大型有限元分析软件Marc进行多货罐化学品船液货罐体与支承结构的接触分析,获得了各种工况下罐体和支撑结构的应力分布及其规律。为制定CCS《散装运输危险化学品船舶构造与设备规范》(2006)的补充检验要求,提供了依据。
[1] 陈火红.Marc有限元实例分析教程[M].北京:机械工业出版社,2002.
[2] 曾鸣,王福花,王德禹.气垫船着陆垫与车辆甲板之间的非线形接触分析[J].中国舰船研究,2006,1(3):58~61.
[3] 王忠素,张洪玲.基于螺钉连接接触问题有限元分析的探讨[J].设计与研究,2006,2(33):4~7.
[4] 李同勇,尹晓春.复杂非线性数值分析的研讨[J].机械设计与制造,2003,6:65~66.
[5] 宫龙颖.ABAQUS接触问题浅析[J].中国煤炭2009,7(35):66~68.
[6] 张宝生,陈家庆,蒋力培,薛龙.Marc在接触分析中的应用[J].北京石油化工学院学报2003,11(2):38~41.
[7] 胡美艳,姜献峰.有限元分析法在接触现象中的应用研究[J].机电工程,2003,20(5):160~162.
[8] F.Barone and R.Grassini Logicoalgebraic.foundations of contact mechanics International Journal of Theoretical Physics 2004:435~440.
[9] Xiaom in Deng and Ares J.Rosak A finite element investigation of quasi-static and dynamic asymptotic crack-tip fields in hard eningelastic-plastic solids under p lane stress 1994 5:137~156.
[10] Andrzej Myélimski Level Set Method for Optimization of Contact Problems III European Conference on Computational Mechanics 2006:447.
Contact Analysis between the Liquid Cargo Tank of Multi-cargo Tank Chemicals Tanker and its Supporting Structure
Sun Yan Hong Ying He Junsong Liu Zhiyi
chemical tanker;contact;finite element analysis;direct constraint method
This article describes the general method to solve the contacting problems by finite elementanalysis.The large-scale finite element analysis software,Marc,is used for the contact analysis between the liquid cargo tank of multi-cargo tank chemical tanker and its supporting structure.The strengthen ways of the supporting structure are studied to provide the basis for the additional inspection requirements for the development of CCS《Rules for the Construction and Equipment of Ships Carrying Dangerous Chemicals in Bulk》(2006).
U674.13+3.2
A
1001-9855(2010)03-0019-06
2010-02-24
孙 燕(1983-),男,浙江湖州人,硕士研究生,主要从事有限元分析工作。
洪 英(1963-),男,高级工程师,主要从事结构规范研发与编制工作。
贺俊松(1979-),男,高级工程师,主要从事船舶波浪载荷、结构规范研发工作。
猜你喜欢
橡塑技术与装备(2021年6期)2021-03-19 08:11:08
模具制造(2019年7期)2019-09-25 07:29:58
劳动保护(2019年3期)2019-05-16 02:38:16
山东青年(2016年1期)2016-02-28 14:25:25
安全(2015年6期)2016-01-19 06:19:31
中国科技信息(2015年17期)2015-11-02 12:48:29
石油工程建设(2014年5期)2014-03-20 15:24:40
石油化工应用(2014年9期)2014-03-11 17:40:23
当代修辞学(2014年3期)2014-01-21 02:30:44
公务员文萃(2013年5期)2013-03-11 16:08:37
