
基于模糊控制的的总线型温度监控系统的设计
2010-03-26 02:33温阳东高震宇刘思邦
合肥工业大学学报(自然科学版) 2010年9期
温阳东, 高震宇, 刘思邦
(合肥工业大学电气与自动化工程学院,安徽合肥 230009)
0 引 言
温度是工业生产中常见的工艺参数之一,温度控制是生产自动化的重要任务。温度的变化,直接决定生产环境、产品工作状态和寿命。因此必须采取有效的方法精确检测和实时控制温度,保证产品质量、效能达到预期效果。
随着信息技术的兴起,自动化技术体系正发生着变革,现场总线就是顺应这一形势发展起来的技术,它是一项以数字通信、计算机网络、自动控制为主要内容的综合技术。模糊控制是模糊数学与控制理论结合的产物,也是智能控制的重要组成部分。模糊控制在一定程度上模仿了人的控制,能够解决许多复杂而无法建立精确数学模型的控制问题。
本文结合现场总线、模糊控制以及嵌入式技术,针对温度变化要求比较高的场合,设计了一种适用的实时监控系统。
1 系统工作原理
该温度监控系统分为现场控制单元和上位机监控单元,2部分之间通过CAN总线进行连接,图1所示为原理框图[1]。
现场控制单元为系统的底层,由CAN总线的多个节点组成,每个节点为可以进行CAN通信的温控装置。该单元完成全部的控制工作,包括上电自检、初始化各种参数、温度信号的采集与显示、温度的控制等,并将实时采集的温度信号通过CAN总线传送至上位机,在温度的控制方面采用模糊控制算法。
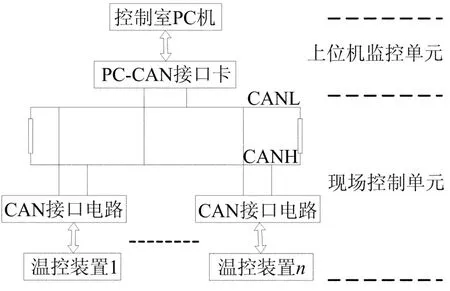
图1 系统原理
上位机监控单元由主机、接至主机内部的CAN总线通信适配卡等组成,主要完成对整个系统的监控、发送控制命令、请求传输命令等。上位机采用的是PC机,便于调度和管理,而且可以充分利用现有的软件和开发环境。上位机不参与控制算法的运算,主要是为操作人员提供良好的监控界面,方便用户对总线上的每个节点的实际温度和设定温度进行比较和检测。利用上位机与现场控制单元进行实时通信,将控制单元存储器中的相关数据传输并显示在计算机终端显示器上,同时上位机也可以对测控平台的历史数据进行存储分析和打印。上位机的测控管理软件通过M icrosoft V isual C++6.0进行开发,该软件的功能结构如图2所示。

图2 上位机软件功能结构
2 硬件设计
2.1 温控装置
位于CAN总线的每个控制节点位置是一种基于LPC2292的智能温控装置,该装置的硬件部分分为数据采集与处理模块、人机接口模块、控制模块和节点通信模块。图3所示为温控装置原理框图[2]。工作人员根据现场需要对温控装置进行参数配置,设定控温范围以及控制方式;温度传感器采集现场的温度信息传至ARM进行数据的分析与处理,ARM将根据设定的参数进行比较和运算,输出控制量控制相应的执行机构进行动作。
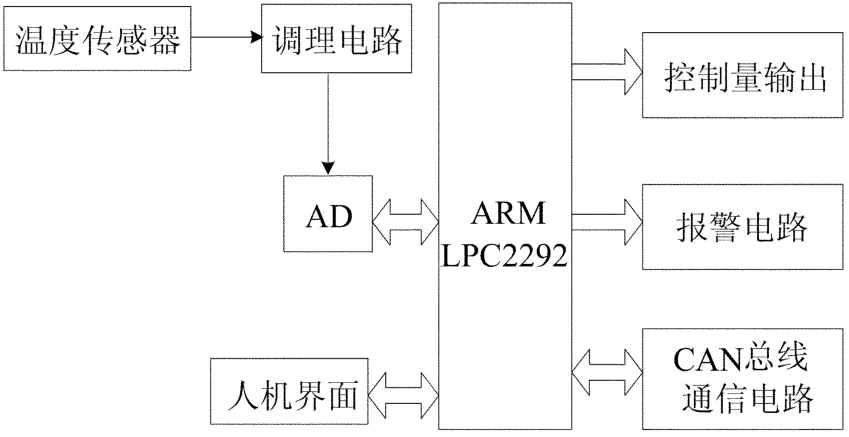
图3 温控装置原理
2.2 CAN总线通信
CAN是ISO国际标准化的串行通信协议,属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作。
CAN总线的物理层定义了物理数据在总线上各节点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。
在CAN中,物理层从结构上可分为3层,分别是物理层信令PLS、物理介质附件PMA层和介质从属接口MDI层。其中PLS连同数据链路层功能由CAN控制器完成,PMA层功能由CAN收发器完成,MDI层定义了电缆和连接器的特性。
CAN的数据链路层是其核心内容,其中逻辑链路控制LLC完成过滤、过载通知和管理恢复等功能,媒体访问控制M AC子层完成数据打包、解包、帧编码、媒体访问管理、错误检测、错误信令、应答、串并转换等功能,这些功能都是围绕信息帧传送过程展开的。CAN具有卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连。
CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信等特点。CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信,特别适用于分布式测控系统之间的数字通讯。CAN总线插卡可以任意插在PC AT XT兼容机上,方便地构成分布式监控系统。
图4所示是温控装置的CAN接口电路[3],采用TJA 1040CAN总线控制器,在信号发送和接收端采用6N137进行光耦隔离,在输出端使用共模滤波器ZJYS551抑制共模干扰。
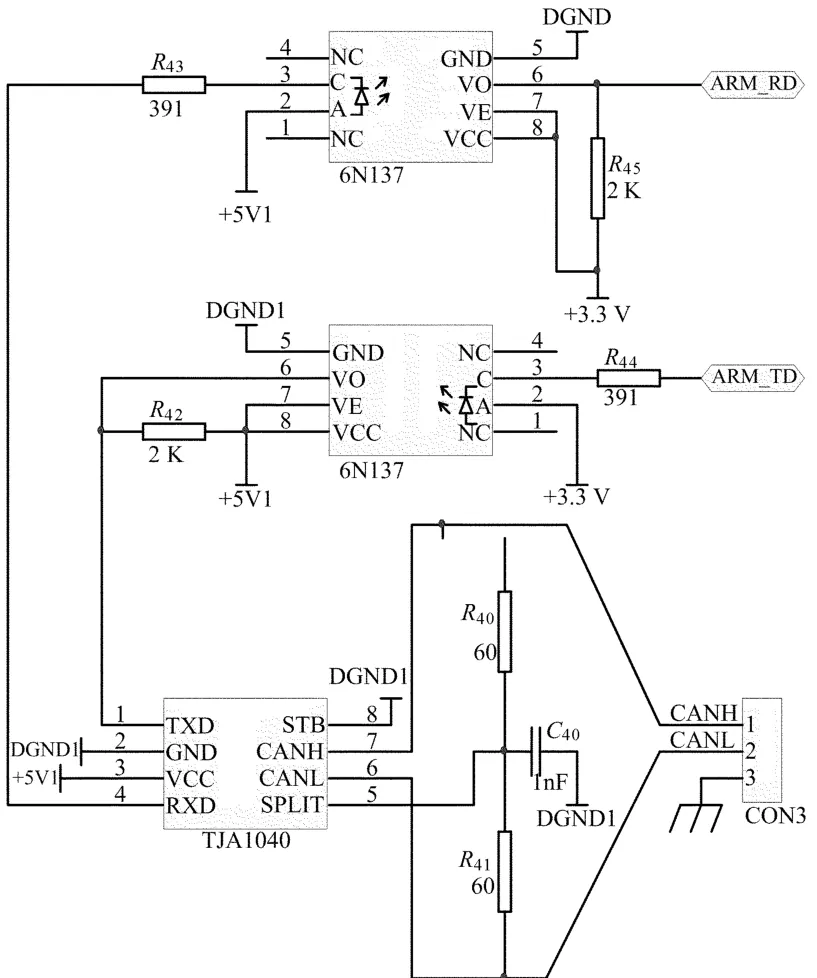
图4 温控装置的CAN接口电路
3 控制算法与软件设计
3.1 模糊PID控制器的设计与实现
现场控制单元采用模糊PID控制,模糊PID控制系统是以模糊规则调节PID参数的一种控制系统,在一般PID控制系统基础上,添加了一个模糊控制规则环节,根据系统实时输出响应情况,运用模糊推理规则,自动实现对PID参数的最佳调整,该方法引入专家调节PID控制器的经验,使PID控制器具有模糊控制的规则[4]。
模糊控制器的输入量为实际温度与设定温度的差值E和温度变化率E c,输出为PID控制器的参数KP、KI、KD,将E和Ec的变化范围定义为模糊集合上的论域E,E c={-3,-2,-1,0,1,2,3},模糊子集为E,Ec={NB,NM,NS,Z,PS,PM,PB},服从三角隶属度函数曲线分布。然后根据专家经验建立模糊关系,表1~表3所列分别为输出参数KP、KI、KD的控制规则[5]。

表1 K P控制规则
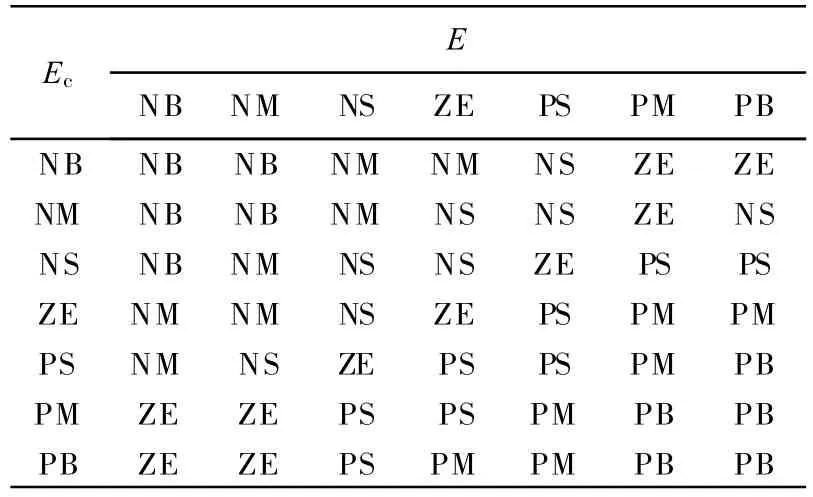
表2 K I控制规则
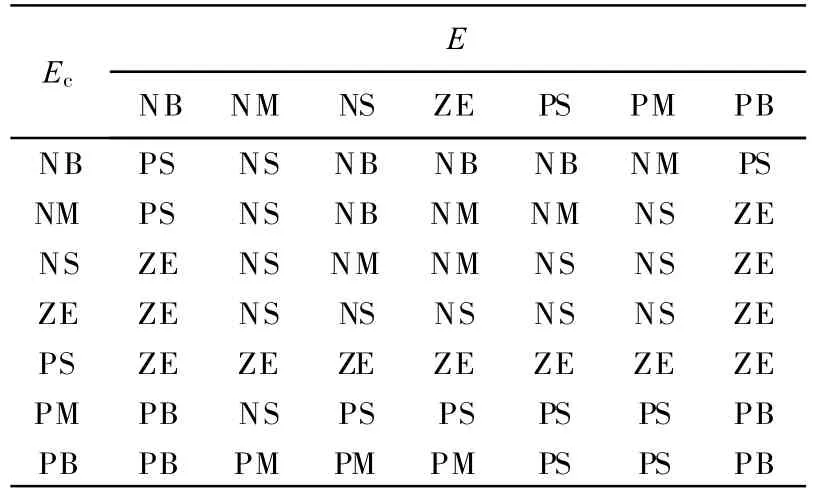
表3 K D控制规则
采用模糊蕴含最小运算的方法,利用“极大-极小”合成模糊规则,进行模糊运算[6]。根据表1的模糊规则,取E=a,Ec=b,且其隶属度分别为μi(a)μi(b),则K P的模糊推理结论为:

同理,可以求出KP、KD参数在不同的温差E和温度变化率Ec下的所有模糊取值的隶属度,然后利用重心法进行去模糊化,可求出K P、K I、K D的精确值。图5所示为模糊PID控制器的原理框图及软件实现流程[7]。
3.2 温控单元主程序设计
温控单元软件部分采用模块化设计,主要分为键盘处理模块、数据采集与处理模块、数据显示与存储模块、温度控制模块以及数据传输模块。在主程序中,通过测量数据与设定数据的比较、控制方式及中断来调用相应的功能模块[8]。

图5 模糊PID控制器的设计及软件流程
图6所示为温控单元主程序流程。系统上电以后,首先进行硬件的初始化,然后进行键盘的扫瞄,看是否有按键按下,如有按下则调用键盘处理子程序;然后采集实时温度信息,分析和处理数据,将相应的数据进行显示和存储;将实时温度与设定温度相比较,调用温度控制子程序,该子程序包括温度的控制算法及控制量输出等;如果上位机发来传送命令,则将相应的数据通过CAN总线传至上位机。

图6 温控单元主程序流程
4 结束语
本文根据现实需要,设计出一款基于模糊控制的总线型温度监控系统,将CAN总线技术应用于温度监控系统,具有较高的性价比,结构简单,系统扩展性强。
针对控制环境,采用模糊控制算法实现控制策略,与传统的PID控制器相比,这种新型的控制器设计简单、实现方便,具有动态性能好、稳态精度高、抗干扰性能好等优点,控制方法简单可靠,可以基本满足控制要求。该温度监控系统在实验室环境下运行良好,所设计内容基本得到实现,但仍需在现场环境下进行进一步的调试。
[1] 温阳东,杜 宇.CAN总线在牵引变电站自动化系统中的应用[J].合肥工业大学学报:自然科学版,2004,27(9):996-999.
[2] 赵跃齐,马瑞卿.基于单片机C8051F的智能温控系统的设计与实现[J].计算机测量与控制,2009,17(3):490-492.
[3] 阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,2008:61-108.
[4] 孙增新.智能控制理论[M].北京:清华大学出版社,2004:16-62.
[5] 赵 宇,王毅博.基于模糊自适应控制的温度控制系统研究[J].自动化技术与应用,2009,28(4):19-23.
[6] 韦 巍.智能控制技术[M].北京:机械工业出版社,2005:10-40.
[7] 曹 青,欧阳红林.基于模糊自适应PID的硫化机外压温度控制系统[J].仪表技术与传感器,2009,(3):95-97.
[8] 钱 美.基于CAN总线温湿监控系统的设计[J].舰船电子工程,2009,(2):175-176.
猜你喜欢
原子与分子物理学报(2020年5期)2020-03-17
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
电子制作(2016年15期)2017-01-15
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
