
防空雷达精确预警关键技术研究
2010-03-23 08:57:30张建科党立坤
航天电子对抗 2010年4期
张建科,党立坤
(防空兵指挥学院,河南郑州 450052)
0 引言
随着信息技术的发展和作战理论的变化,防空火力运用将由传统的以密集射击为主向精确射击转变,使未来防空作战更趋于精确化。精确预警即预警信息精确化,指预警侦察到的目标参数可满足防空火力单元作战需求,实现预警、监视、跟踪、火力支援于一体。它是精确防空作战的前提和基础。目前受装备性能、技术水平限制,防空雷达精确预警还存在差距。本文从提高精确预警能力出发,对防空精确预警的关键技术进行了研究。
1 精确标定
精确标定是提高雷达探测精度和实现战场空情信息精确共享的基础,主要是对雷达进行精确的位置标定和方位标定。
对防空警戒雷达的位置标定主要是通过在军用地图中查询大地坐标(或大地直角坐标)定位,部分利用GPS定位或“北斗卫星”定位。地图查询法定位精度低、速度慢,距离偏差较大;GPS定位受制于美国,安全性可靠性差。通常防空警戒雷达采用陀螺电子寻北仪标定法或方向盘标定法来标定方位,这两种方法都能准确标定,但各自存在缺陷。陀螺电子寻北仪受测量原理限制,只有在中、低纬度才能保证精度,且对载体稳定度和水平度要求高,每次完成标定所需时间较长;方向盘标定法依靠人工作业标定,速度慢、精度低、受气候条件影响大、夜间标定困难。可见,目前对雷达的标定还难以满足精确预警的需求。
利用“北斗一号”卫星定位系统可同时实现对警戒雷达的精确定位和方位标定。进行位置标定时,其定位精度能满足需求。“基于北斗的雷达方位标定”是一种理论上较好的雷达方位标定方法,其基本原理是通过将卫星在WGS84空间大地坐标系[1]的位置转化为雷达站心地平直角坐标系[2],根据北斗卫星数据建立真北方位角计算方法确定雷达方位。这种方法可以消除诸多误差源,但部分技术问题尚需深入研究。随着技术发展,未来防空兵武器装备的方位角标定系统必然是向精度高、速度快、操作简便的方向发展,并形成相对独立的模块化子系统嵌入到装备中去,更适宜战场操作和全天候作战。
我国正在建设完善的“北斗二号”卫星导航系统由35颗卫星组成,最终建成全球卫星导航系统,它的军用终端定位精度可以达到厘米级别,与现行的“北斗一号”区域性导航系统相比,性能有较大提高,用于警戒雷达的精确标定精度将更高。
2 精确探测
探测精度是雷达的主要战技术指标之一,随着空袭兵器性能的提高和对精确预警的需求,对雷达的探测精度提出了更高的要求。
2.1 影响探测精度的因素
目前防空警戒雷达多采用机械扫描与频率扫描相结合,在探测精度上还存在差距,难以满足为火力单位提供精确的目标参数的要求。影响雷达测量精度的因素很多,雷达体制和自身设计性能是影响精度的主要原因。此外,目标、电磁波的传播空间、雷达的各个分机等都是雷达测量系统的组成部分,这些部分工作的准确性和稳定性也都影响测量的精度。提高雷达精度,系统设计是很重要的,精度设计包括雷达体制的选择、误差控制、误差分配。
2.2 提高探测精度的方法
相控阵技术。相控阵技术主要是通过移相器来控制天线辐射单元的相位,从而改变波束的指向,在方位和仰角方向实现波束扫描。采用了相控阵技术的雷达被称为相控阵雷达。它的天线由成千上万个天线组成,天线波束宽度窄,副瓣电平低,具有较高的测角精度和测距精度,其角跟踪精度能小于0.2°,距离精度能小于2m[3]。担负防空侦察预警任务的相控阵雷达要以对远区目标进行搜索为主,同时可为火力单元提供高测量精度的空情信息,这需要根据雷达作用距离的要求,合理选择波长。波长短,可提高雷达发射天线的增益,提高测量精度;波长长,能量损失小、探测距离远,但要求大的天线孔径。美国的“爱国者”防空系统中的雷达(AN/MPQ-53)是一部集搜索、监视、截获、跟踪于一体的相控阵机动雷达,其主要参数见表1[4]。
脉冲压缩技术。脉冲压缩技术在发射时采用宽脉冲以提高发射的平均功率,满足提高探测距离、降低发射机及馈线承受高峰值功率的要求;接收时采用相应的脉冲压缩法获得窄脉冲,以满足距离分辨率和测距精度的要求。相对普通警戒雷达,采用脉冲压缩体制雷达能够提高距离分辨率和测距精度。

表1 AN/MPQ-53相控阵雷达战技术参数
激光雷达技术。激光雷达是以激光器为辐射源,以光电探测为接收器件,以光学望远镜为天线的雷达。它具有高的天线增益和极窄的波束,测角精度可达0.1m rad。它的脉冲宽度可以达到纳秒级,测距精度可达到厘米级。但其对目标的搜索和捕获相对困难。
跟踪雷达预警技术。火控雷达、制导雷达等跟踪雷达都具有较高的探测精度,能满足火力单元的精确射击需求。可将跟踪雷达通过情报信息系统接入预警网络,在其自身火力单元无法实施射击时为其它火力单元提供精确目标参数,作为精确预警单元使用。
3 时间统一
3.1 时间统一的必要性
在防空预警中,时间信息是保证各雷达单元信息交互精确性的基础,应作为目标空情信息的重要组成部分。警戒雷达获取的精确空情信息,在传输给其他雷达站和信息处理单元过程中,系统间存在时间误差和一定时间延迟,如果没有严格统一的时间标准,就难以保证空情信息在时间上的精确性,精确预警就失去了意义。
3.2 空情信息的时间统一
时间统一,也称为时间同步或对时,就是将各种同步或异步工作的雷达在时间基准和频率基准上保持一致,使信息处理更精确。为了保证同一时刻目标位置信息在各雷达站或信息处理单元中的一致性,可以在传输的目标航迹信息中加入精确的时间信息,可用如(M,R,T)格式的数据包进行信息传输,其中M为警戒雷达获取目标信息,包括批次、目标位置高度、速度、机架、航向等信息;R为该雷达的位置信息,包括经纬度和高程;T为获取目标信息的精确系统时间,格式为(n-y-r,h-m-s-ms-μs),n-y-r为年-月-日,h-m-s-m s-μs为时-分-秒-毫秒-微秒。在各处理单元对目标信息进行处理时,首先提取的目标航迹信息进行卡尔曼滤波,估算目标未来点坐标参数;提取时间信息与本单元时间信息对比,根据时间差能获取当前时间目标位置信息。
3.3 定时和校频
利用“北斗一号”定位系统的授时服务功能,可实现对各雷达站和信息处理单元统一的对时和校频,它的单向标称定时精度较高,已完全能够满足精确预警需求。雷达系统可以通过提供基于“北斗一号”精确授时的标准接口,或者将北斗一号的定时接收机及校频模块植入雷达系统中来实现精确定时。
单向定时模式下,用户机不需要与地面中心站进行交互,只需接收导航电文信号,自主获得本地时间与北斗标准时间的钟差,实现时间同步。可通过使用“北斗一号”单向定时接收机或定位接收机实现。利用定位接收机时其工作原理如图1所示。
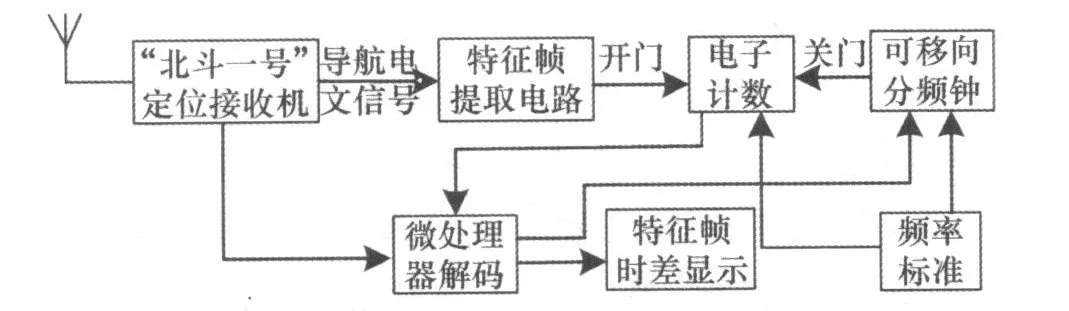
图1 “北斗一号”定位接收机单向定时原理
从定位接收机收到的导航电文信号中提取特征帧信号打开电子计数器闸门,用本地钟输出的1pps秒信号关门。从导航电文中读取卫星轨道参数,根据本地坐标计算伪距,确定传播延时;读取特征帧相对于标准时间的时差信息,计算出钟差改正值,对本地钟进行钟差改正,可实现单向定时。
“北斗一号”校频可在获得标准时间的基础上,采取时差法进行,其工作原理如图2所示。

图2 “北斗一号”时差法校频原理
将被测频率通过分频或数字钟得到1pps秒信号,然后与接收机输出的1pps秒信号用示波器或计数器进行时差对比,两次测量期间平均的相对频率偏差为:

式中,Δf/f为相对频率偏差;t2、t1为两次测量的时刻;Δt2、Δt1分别为标准秒信号与被测秒脉冲在测量时刻t2和t1测得的时刻差。
4 雷达组网
4.1 雷达组网的意义
雷达组网是通过对多部不同体制、不同频段、不同极化方式的雷达进行适当和合理优化的布站,对网内各部雷达获取的空情信息进行收集和传递,并由中心站综合处理、控制和管理,从而形成有效的综合性探测网。雷达网在配置上具有高、中、低空,远、中、近程的全空域立体式观察能力;在技术上实现各单站雷达信息相关处理、网内雷达资源共享,能有效增强对敌隐形及低空目标的预警能力、提高探测距离和探测精度;从任务上说,雷达网系统应具有预警、引导、目标指示、火控、指挥控制和干扰等功能;为了提高信息化条件下防空反导、反隐身目标的精确作战能力,通常需要进行雷达组网及火力系统组网。
4.2 时空校准和数据融合
雷达组网的关键是空间校准、时间统一和数据融合。由于各单站雷达的坐标系不同,数据采样率、数据获取时间不同,数据融合中心为了进行数据关联,必须先进行空间和时间的校准。
通过“北斗一号”卫星定位系统进行精确定位和方位标定,可实现空间校准。但在雷达测量系统中,获取的目标位置信息均是以雷达站为中心的极坐标系表示,需要将各站测得的目标极坐标系转换到统一的坐标系进行融合。其过程为:先将各雷达站极坐标转换为雷达站直角坐标,然后变换到空间大地坐标系,在融合中心以空间大地坐标系格式进行融合处理,然后再将信息传给各雷达站,由雷达站再解算变换为各自的极坐标信息;或者在融合处理后直接根据各雷达站在空间大地坐标系中的位置进行解算,形成各站的站心球极坐标信息后,传输给相应的雷达站。
时间的校准可以参照时间统一技术,各雷达站都采用“北斗一号”定时校频,校准精度完全高于传统的线性时间校准插值法、抛物时间校准插值法以及其他时间插值法获取的时间精度。
组网雷达的数据融合处理有集中式点迹融合、分布式航迹融合和混合式融合3种。集中式点迹融合将各单雷达的点迹数据直接送到融合中心进行滤波,实现点迹融合,形成目标航迹。其具有融合精度高、系统时延小、系统发现概率高的优点,但由于数据量很大,对融合中心处理机的处理能力和通信带宽要求高。分布式航迹融合先由单雷达数据处理器对各自的观测进行处理,形成本地航迹,再传给数据融合中心进行航迹相关和融合。分布式航迹融合系统是一种常见的融合方式,它的可靠性高,在单站故障时整个系统仍能工作,具有重组能力,且可降低对融合中心处理机能力和通信带宽的要求;但系统融合精度不高,系统时延相对较大,特别是在整个组网雷达或网内大部分雷达受到强电子干扰,单站雷达的距离信息就会丧失,无法在单站对目标进行定位滤波而形成航迹,从而无法进行分布式航迹融合。混合式融合是点迹融合和航迹融合的结合,即在系统中有多个同等级别的处理中心存在,各个处理中心融合若干单站的观测数据,最后由顶层融合中心实现航迹融合或者点迹/航迹融合。它在处理机性能、通信带宽、系统时延、融合精度和探测概率的要求上得到了较好的折中,比较合理,目前已普遍应用于外军C4ISR系统中。
5 结束语
随着未来精确防空作战的发展,防空雷达主要功能将向预警探测、侦察监视、打击引导一体化的精确预警发展。采用相控阵、脉冲压缩等技术可提高防空雷达自身的侦察预警的精确度;采用基于“北斗一号”卫星定位系统进行精确标定和时间校准,具有较高的精度;防空雷达组网能有效整合预警资源,提高精确预警能力。对防空雷达精确预警在精确标定、精确探测、时间统一、雷达组网四个方面的研究,对防空雷达在精确预警方面的发展和实现精确防空作战有参考价值。■
[1] 刘冬利,何民,等.一种新的岸海警戒雷达标校方法[J].电讯技术,2009(6):53-56.
[2] 陈永光,李修和,等.组网雷达作战能力分析与评估[M].国防工业出版社,2006.
[3] 张光义,赵玉洁,等.相控阵雷达技术[M].电子工业出版社,2006.
[4] 张立韬,李盾,等.相控阵雷达搜索参数研究[J].现代雷达,2008(10):20-25.
[5] 童宝润,吴贵臣,等.时间统一技术[M].国防工业出版社,2004.
[6] 李威伟.精确作战浅析[J].国防大学学报(战役问题研究),2005(6):42-43.
[7] 李容,韦巍,等.一种基于GPS定位的雷达方位标定方法[J].成都信息工程学院学报,2008(5):499-503.
猜你喜欢
军事文摘(2022年11期)2022-06-24 09:22:46
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:16
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
青年歌声(2019年12期)2019-12-17 06:32:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47
IT经理世界(2014年10期)2014-05-29 09:09:51
中国信息化·学术版(2013年5期)2013-10-09 06:02:58
小哥白尼·趣味科学画报(2006年1期)2006-02-15 01:06:54
