
基于信息融合的核管道缺陷检测研究
2010-03-06 03:09张黎明赵新文李维高
中国舰船研究 2010年6期
张黎明 蔡 琦 赵新文 李维高
1海军工程大学 船 舶与动力学院,湖北 武 汉 430033
2中国人民解放军92330部队,山东 青 岛 266100
基于信息融合的核管道缺陷检测研究
张黎明1,2蔡 琦1赵新文1李维高2
1海军工程大学 船 舶与动力学院,湖北 武 汉 430033
2中国人民解放军92330部队,山东 青 岛 266100
分析核管道缺陷的特点并进行分类,根据多传感器信息融合技术的原理,确定缺陷信息的融合模式和融合方法,建立基于D-S证据理论的检测信息时空融合流程。仿真和融合计算表明:该方法可以充分利用多种检测方法之间的互补信息以及核管道缺陷检测的历史数据,实现核管道缺陷类型快速而准确的判定,为提高核管道缺陷检测的可信度和智能化水平提供了一种有益的尝试。
信息融合;D-S证据理论;时空融合;核管道;缺陷检测
1 引言
核管道缺陷检测对核管道的质量控制和安全使用起着极其重要的作用。目前,经常采用的检测方法有:超声、射线、磁粉、漏磁、渗透、涡流、红外和声发射法等,上述方法各有所长,也都各有其局限性,例如,超声波法对裂纹、未熔合等平面类缺陷具有较强的检测能力,但对体积状缺陷的检出率较低;射线检测对气孔、夹渣、疏松等体积状缺陷较敏感,对平面缺陷检测灵敏度较低[1-2]。鉴于单一检测方法的局限性,如何充分利用各种检测方法的长处,相互结合,取长补短,提高核管道检测的可靠性、准确性和检测效率一直人们所关注的课题。为此,本文结合核管道缺陷特点,采用基于D-S证据理论的时空融合的方法,提出了核管道缺陷检测信息融合的新思路,实现了核管道缺陷类型的快速而准确地判定。
2 核管道的缺陷分类
核管道的缺陷检测是核动力装置“合乎使用”评定工作的基础之一,其结果的正确性和缺陷检测的灵敏度直接影响评定结论的合理性和准确性,关系到核设施能否安全运行的重要问题。核管道的缺陷最为常见且发生概率较大的主要包括由于制造或使用引起的腐蚀穿孔、氯离子腐蚀、介质冲蚀-腐蚀、焊接缺陷开裂、应力腐蚀开裂、凹坑、沟槽等[3]。核管道的缺陷类型根据不同的划分标准可以进行不同的分类:按照缺陷位置划分,主要有穿透缺陷、内表面缺陷、外表面缺陷和埋藏缺陷;按照缺陷的方向划分主要有环向缺陷和轴向缺陷。本文所研究的缺陷则以其特征尺寸为分类标准,可以分为以下4大类:
1)平面型缺陷,即裂纹类缺陷,包括焊缝未熔合缺陷、未焊透缺陷、焊接裂纹、疲劳裂纹、应力腐蚀裂纹等;
2)体积型缺陷,包括气孔、夹渣、局部沟槽状腐蚀缺陷、片状腐蚀缺陷等以及部分机械损伤缺陷如凹坑、沟槽等;
3)几何型缺陷,包括焊缝错边、焊缝撅嘴、壁厚不均匀缺陷等;
4)弥散损伤型缺陷,包括点蚀腐蚀缺陷、表面鼓泡等。
3 基于D-S证据理论的信息融合技术
信息融合的基本目的是要充分利用多个传感器资源,通过适当的综合来获得比任何单一信息源所能表达的更多的信息,即通过采用多传感器协调和联合运作的优势提高检测系统的整体性能[4]。根据融合系统所处理的信息层次,系统常划分为数据层融合、特征层融合和决策层融合。在核管道检测中,由于各种检测设备的特性不一致,使各种检测方法得到的缺陷信息模式不同,缺陷特征也不一致,因此,本文在核管道检测中采用决策层融合,这种融合方式不仅对各检测设备的输出信息约束最小,而且系统的可靠性较高。
常用的信息融合方法大致分为以下几类:1)基于估计和统计的经典方法,包括加权平均法、最小二乘法、贝叶斯估计和D-S证据理论等;2)信息论的融合,包括模板法、聚类分析和熵理论等;3)人工智能的融合方法,包括模糊集、产生式规则、神经网络、遗传算法和模糊积分理论以及专家系统等。D-S证据理论在处理具有主观不确定性判断的多属性诊断问题时具有独特的优势[5-7],因此,对经常采取2~3种方法进行缺陷检测的核管道,其检测信息的决策级融合采用D-S证据理论可以取得比较理想的结果[8]。
3.1 D-S 证据理论
D-S证据理论基本思想是:首先对来自多个传感器和信息源的证据(即数据或信息)进行预处理,然后计算各个证据的基本可信度分配值,再根据D-S组合规则计算所有证据联合作用下的基本可信度分配值,最后按照一定的判决规则选择可信度最大的假设作为融合结果[9-10]。
定义1:对于一个决策问题,所有能够认识到的可能结果的有限集合用Θ表示,称Θ为一个识别框架。
定义2:设Θ 为识别框架,如果函数m:2Θ→[0,1](2Θ为 Θ 所有子集构成的集合)满足:

则称m为Θ上的基本概率分配函数;m(A)为A的基本信度分配。如果m(A)>0,则称A为焦元。
定义3:对于∀A⊆Θ,

则称 Bel(A)为 A 的信度函数,Bel(A)描述了对A的信任度。
结合D-S证据理论基本原理及其在故障诊断中的应用思想[5-10],本文建立如图 1 所示的单周期缺陷检测信息融合过程图。
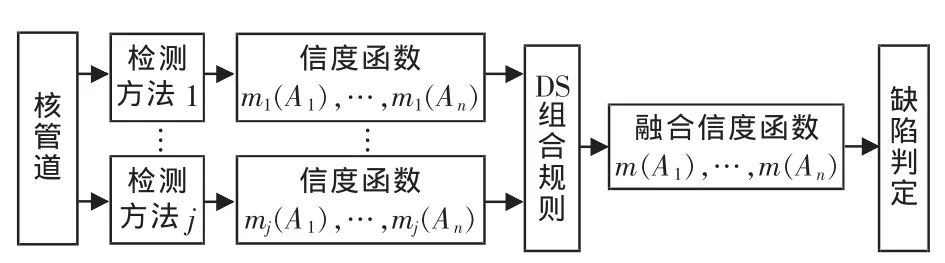
图1 单周期缺陷检测信息融合过程图
图中{A1,A2,…,An}为证据理论的论域 Θ 中的基本命题,对应于概率论中的基本事件,在本文中可以对应于核管道的基本缺陷类型,如体积型、几何型等,也可以指定为具体缺陷如裂纹、凹坑等,mj(A1),mj(A2),…,mj(An)表示检测方法 j测得的特征属于缺陷 A1,A2, …,An的信度函数,m(A1),m(A2),…,m(An)是各检测方法所获得的特征信息融合后分配到各缺陷类型上的信度函数值。
3.2 D-S 组合规则
根据D-S组合规则,设m1和m2分别对应同一识别框架 上的信度函数分配,焦元分别为A1,A2,…,Ak和 B1,B2,…,Bk,设

式(4)表示完全冲突假设Ai和Bj的所有信度函数乘积之和;A是指假设的目标模式Ai和Bj布尔组合的一个综合命题,A的信度函数值是包含不冲突假设Ai和Bj的所有信度函数乘积之和,即可定义融合后信度函数分配值m(A)如下:

3.3 缺陷判定准则
缺陷判定一般遵守如下规则:
1)判定的缺陷类型应具有最大的信度函数值,并要大于某一阈值;
2)判定的缺陷类型和其他类型的信度函数值之差要大于某个阈值;
3)不确定缺陷函数值必须小于某个阈值;
4)判定缺陷类型的信度函数值要大于不确定信度。
3.4 时空融合
利用证据理论中的D-S组合规则,既可以对多种测量方法提供的缺陷识别证据进行空间域的决策融合,也可以对一种检测方法不同检测周期提供的缺陷识别证据进行时间域的决策融合。对于核管道来说,其存在在役检查的数据累积行为,通过时间域上的周期融合,能够有效地将以前的历史数据充分利用,进一步提高核管道缺陷检测的可靠性和准确性。即便是实际的缺陷检测中,为了能更准确地测出缺陷类型,也往往采用多方法多周期测量。因此,核管道的缺陷决策可以通过图2所示的递归集中式目标识别信息时空融合方法进行识别。该方法将T-1周期的集中式累积目标识别信息与T周期由n个传感器测得的目标识别信息相组合,以D-S组合规则进行信息融合,得到在T周期总的目标识别融合信息[11]。
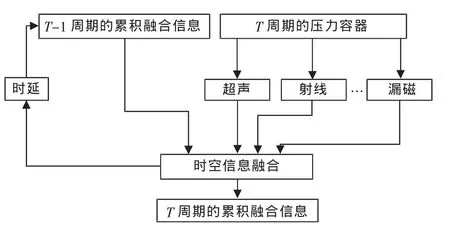
图2 时空融合流程图
4 仿真计算
以超声检测、射线检测和漏磁检测3种检测方式为例,对某已知缺陷为应力腐蚀裂纹缺陷的船用核管道进行检测,假定该核管道有5类常见缺陷类命题,即弥散损伤型、几何型、平面型、体积型和“不明”缺陷类。对缺陷类进行检测时,根据3种检测设备的历史数据,通过对不同环境下不同的检测方法的可信度进行评估,设定2个测量周期的可信度分配如表1所示。由D-S证据理论融合算法,可得各个周期空间域融合可信度分配以及两周期时空融合可信度分配如表2所示。
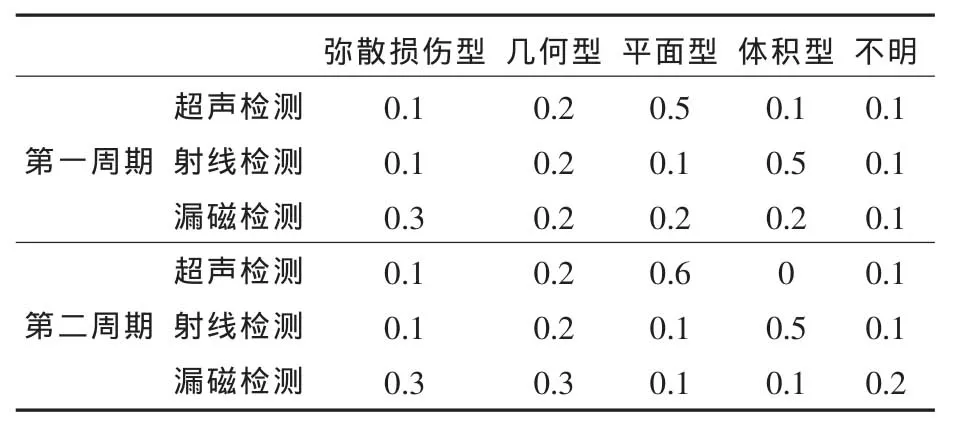
表1 两个测量周期可信度分配

表2 融合结果
通过表2分析可以看出,第一周期空间域融合结果中,平面型缺陷和体积型缺陷的可信度相同且最大,这导致无法判断核管道的缺陷类型;第二周期的“不明”命题可信度较大;但对两个周期的可信度进行时空融合后,融合结果使“不明”命题的可信度降低,如采取信度函数值最大的判断原则,则核管道的缺陷类可以确定为平面状缺陷,与实际情况相符。
5 结 论
1)采用决策级融合模式和基于D-S证据理论的信息融合方法可以将来自不同类型的核管道缺陷检测仪器所提供的信息进行快速而有效地融合,有效地克服单一检测方法中存在的片面性和不确定性,提高核管道缺陷判定的准确度。
2)时空信息融合方法具有较强的信息处理能力,可以充分利用历史数据,更准确地反映问题的实际情况,减轻检测人员工作强度,降低检测成本,提高检测精度。进一步研究新的、适合核管道检测的信息融合方法,必将促进核管道缺陷检测的智能化水平。
[1]李光海,沈功田,李鹤年.工业管道无损检测技术[J].无损检测,2006,28(2):89-93.
[2]李雪辰,徐滨士,董世运,等.管道内壁缺陷无损检测技术[J].无损检测,2007,29(10):603-606.
[3]苗中辉.核动力装置一回路管道缺陷评定研究 [D].武汉:海军工程大学,2008.
[4]何友,王国宏,陆大琻,等.多传感器信息融合及应用[M].第二版.北京:电子工业出版社,2007.
[5]朱大奇,刘永安.故障诊断的信息融合方法[J].控制与决策,2007,22(12):1321-1328.
[6]程利民,孔力,李新德.信息融合方法及应用研究[J].传感器与微系统,2007,26(3):4-16.
[7]王正军,张培林,任国全,等.基于D-S证据理论的发动机信息融合故障诊断模型 [J].润滑与密封,2008,33(4):74-77.
[8]LEVRE E.COLOT O, et al.A generic framework for resolving the conflict in the combination of belief structures[C]//The 3rd International Conference on Information Fusion.Paris, France, 2007: 235-239.
[9]胡冠林,李娟,罗勇.D-S证据理论信息融合在故障诊断中的应用[J].计算机与数字工程,2007,35(8):151-153.
[10] BASIR O,YUAN X H.Engine fault diagnosis based on multi-sensor information fusion using Dempster-Shafer evidence theory[J].Information Fusion,2005,6(1):25-36.
[11] HONG L,LYNCH A.Recursive temporal-spatial information fusion with applications to target identification [J].IEEE.Trans.On Aerospace and Electronic System,1993,29(2):435-445.
Defect Detection of Nuclear Piping System by Information Fusion Technology
Zhang Li-ming1,2 Cai Qi1 Zhao Xin-wen1 Li Wei-gao2
1 College of Naval Architecture and Power, Naval University of Engineering, Wuhan 430033, China
2 The 92330thUnit of PLA,Qingdao 266100,China
The defect features of nuclear piping were summarized and analyzed.Based on the principle of multi-sensor information fusion technology, the defect information fusion mode and method were determined and the spatial-temporal fusion flow of defect information based on D-S Evidence Theory was estimated.The results of emulation and fusion calculation indicate that this method can make full use of the mutual information by multiple methods of defect detection and historical data,through which we can judge the defect of nuclear piping rapidly and precisely.The results can give a beneficial reference for improving the probability and the intelligent level of defect detection of nuclear piping.
information fusion; D-S evidence theory;spatial-temporal fusion;nuclear piping;defect detection
TQ051
A
1673-3185(2010)06-75-03
10.3969/j.issn.1673-3185.2010.06.015
2009-09-27
张黎明(1981-),男,博士研究生。研究方向:维修工程和综合保障。E-mail:zlm060101@yahoo.com.cn
猜你喜欢
四川党的建设(2022年8期)2022-04-28
世界科学技术-中医药现代化(2021年7期)2021-11-04
中学数学研究(江西)(2021年7期)2021-07-24
小学生学习指导(低年级)(2020年11期)2020-12-14
——基于体育核心期刊论文(2010—2018年)的系统分析
体育科学(2020年2期)2020-04-09
作文大王·低年级(2018年10期)2018-12-06
幼儿智力世界(2016年6期)2016-05-14
小猕猴智力画刊(2016年5期)2016-05-14
祝你幸福·知心(2016年3期)2016-03-29
小雪花·初中高分作文(2015年10期)2015-10-24
