基于Elman 网络的传递对准容错联合滤波器设计与仿真
2010-02-21 05:34:12胡健马大为程向红周百令
兵工学报 2010年11期
胡健,马大为,程向红,周百令
(1.南京理工大学 机械工程学院,江苏 南京210094;2.东南大学 仪器科学与工程学院,江苏 南京210096)
在机翼挠曲变形不可忽略的情况下,采用速度加姿态匹配的方法可进行快速传递对准[1-2]。但用于快速传递对准的Kalman 滤波器的阶数将高达21维,故需要进行大处理量的滤波计算,这将导致快速传递对准所要求的快速滤波更新率得不到满足。文献[3]采用联合Kalman 滤波器解决这一问题。但在联合滤波器中,对应于各子滤波器和主滤波器的信息分配系数β1,…,βm的取值决定了联合滤波器的性能,而文献[3]并未对信息分配系数进行优化。此外,Kalman 滤波器对系统模型和噪声等不确定性因素的鲁棒性能较差。文献[4]采用强跟踪Kalman滤波器来提高系统鲁棒性,但是该方法在克服滤波发散的过程中,破坏了滤波器的最优条件,导致滤波精度降低。文献[5]推导了一种能根据每个状态噪声的变化来调节误差协方差阵中相应的渐消因子的强跟踪滤波算法,进一步提高了强跟踪Kalman 滤波器的自适应能力,但滤波精度并未得到明显改善。
本文综合考虑以上各因素,提出采用联合强跟踪Kalman 滤波器进行快速传递对准。提出了一种基于模糊加权系数的误差方差阵估计方法,以提高传统强跟踪Kalman 滤波算法的精度,并在此基础上设计了联合强跟踪Kalman 滤波器的结构和算法,并利用改进的Elman 网络进行信息分配系数的自适应调节。仿真结果表明,在载机进行摇翼机动的情况下,应用联合强跟踪Kalman 滤波器进行快速传递对准,不仅大大减小了计算量,提高了滤波器的解算速度,而且实现了融合信息在各子系统中的自适应分配,提高了系统故障鲁棒性和状态估计精度。
1 改进的强跟踪Kalman 滤波算法
1.1 模糊加权系数的引入
在强跟踪Kalman 滤波算法中,误差方差阵的估计公式[4]为
取历史均方误差信息矩阵V0(k)的对角线元素构成向量Vs(k),简记为Vs(k)=diag[V0(k)].同理,取当前残差信息矩阵εkεTk的对角线元素构成向量Vε(k),简记为Vε(k)=diag[εkεTk].相似系数rij表示2个样本xi与xj之间的相似程度,它可以用数量积分法、夹角余弦法、距离法等确定。本文采用夹角余弦法计算向量Vs(k-1)和Vε(k)之间的相似系数rv(k),即显然,相似系数rv(k)的大小反映了当前残差信息矩阵与历史信息阵V0(k-1)的相似程度。基于相似系数rv(k),本文给出V0(k)估计公式V0(k)=(1 -γ)·根据相似系数rv(k)和状态估计方差阵的迹tr(Pk-1)确定,本文称之为模糊加权系数。
1.2 模糊加权系数的自适应调节
本文根据模糊理论对参数γ 进行在线调节,以提高滤波器性能。模糊自适应调节系统的输入为当前时刻的相似系数rv(k)和前一时刻状态估计方差阵的迹tr(Pk-1),它们按照Gauss 隶属度函数进行模糊化,系统的输出按照重心法进行反模糊化。
当rv(k)较小,tr(Pk-1)也较小时,表明当前信息阵与历史信息阵的相似程度低,且前次滤波精度较高,历史信息阵的估值较准,则γ 应取较小值,以减小对当前信息阵的利用程度;当rv(k)较小,tr(Pk-1)较大时,表明当前信息阵与历史信息阵的相似程度低,且前次滤波精度较低,历史信息阵的估值不太准,则γ 应取较大值,以加大对当前信息阵的利用程度;其余依此类推,从而得到系统的模糊推理规则如下:
1)如果rv(k)很小且tr(Pk-1)很小,则γ 较小;
2)如果rv(k)很小且tr(Pk-1)较小,则γ 较小;
3)如果rv(k)很小且tr(Pk-1)较大,则γ 较大;
4)如果rv(k)较小且tr(Pk-1)很小,则γ 较小;
5)如果rv(k)较小且tr(Pk-1)较小,则γ 较小;
6)如果rv(k)较小且tr(Pk-1)较大,则γ 较大;
7)如果rv(k)较大且tr(Pk-1)很小,则γ 较大;
8)如果rv(k)较大且tr(Pk-1)较小,则γ 较大;
9)如果rv(k)较大且tr(Pk-1)较大,则γ 较小。
2 联合强跟踪Kalman 滤波器结构设计
本文针对速度加姿态匹配快速传递对准设计了一个联合强跟踪Kalman 滤波器,其结构如图1所示。该滤波器是一种两级数据融合结构,具有2 个子滤波器,分别为速度子滤波器和姿态子滤波器,前者使用主惯导的速度数据作观测量,后者使用主惯导的姿态数据作观测量,它们均采用改进的强跟踪Kalman 滤波算法给出各自状态变量的最优估计,再由主滤波器融合2 个子滤波器的输出,给出2 个子滤波器共同状态的全局最优估计.结构中改进的Elman 网络用于将信息系数β1,β2,βm自适应分配到各子滤波器和主滤波器中。图中,Pcv,,Pcθ,和Pcm分别为速度子滤波器、姿态子滤波器以及主滤波器对公共状态变量的局部最优估计和误差协方差阵;为Xc的全局最优估计;Pc为全局最优估计的误差协方差阵;Qc为公共状态的过程噪声方差强度阵。

图1 快速传递对准联合强跟踪Kalman 滤波器结构Fig.1 Structure of federated strong tracking Kalman filter for rapid transfer alignment
3 联合强跟踪Kalman 滤波器信息分配
联合滤波器的信息分配原则对于提高系统的可靠性、精度等具有重要意义,Carlson[7]最先提出的信息分配原则是固定比例的,考虑到在实际的高动态导航环境中,各子滤波器的性能和估计质量都是不断变化的,这时Carlson 提出的固定信息分配策略就不能够满足应用的需求了。文献[8 -10]提出了不同的信息分配原则。文献[8]利用局部滤波和全局滤波一步预测信息阵的迹之比作为信息分配系数,从而使联合滤波局部滤波器的设计也成为最优。文献[9]提出一种引入权衡因子的信息分配策略,能够根据具体应用场合灵活调整局部滤波精度和容错性。文献[10]提出了一种基于子系统在不同环境下可能发生的故障概率的鲁棒信息分配方法,对于提高子滤波器的抗干扰能力有一定的效果。虽然关于信息分配研究成果很多,但目前为止还没有一个统一的认识。尤其是当发生传感器故障时,怎样通过信息分配提高具有反馈结构的联合滤波器无故障子系统抗污染能力的问题,未引起足够的重视,而这对于提高联合滤波器的鲁棒性和快速重构能力具有重要意义。
Elman 神经网络[11-12]模型在前馈网络的隐含层中增加一个承接层,作为一步延时算子,达到记忆的目的,从而使系统具有适应时变特性的能力,能直接反映动态系统的特性。因此,本文利用改进的Elman 网络根据局部滤波器和主滤波器的实时动态性能来调整信息分配系数,可有效提高系统故障鲁棒性和快速重构能力。
3.1 改进型Elman 网络结构与训练算法
标准Elman 网络中自反馈增益α 是固定值,一般是根据经验来选取,α 值选择得不好会导致系统出现发散现象,而本文考虑把各α 当作连接权值投入到网络的训练中,从而实现自反馈增益系数的动态修正。此外,为了增加神经元对历史数据的敏感程度,在原Elman 网络中增加了输出层关联单元,以存储输出层的历史数据,并反馈给输出单元,设计了一个适于本系统的改进型Elman 网络,其结构如图2所示。改进后的Elman 网络具有较高的收敛精度和较短的学习时间。设网络的输入层为r 个节点,隐层和隐层关联单元为n 个节点,输出层和输出层关联单元为m 个节点,则网络的状态空间表达式为
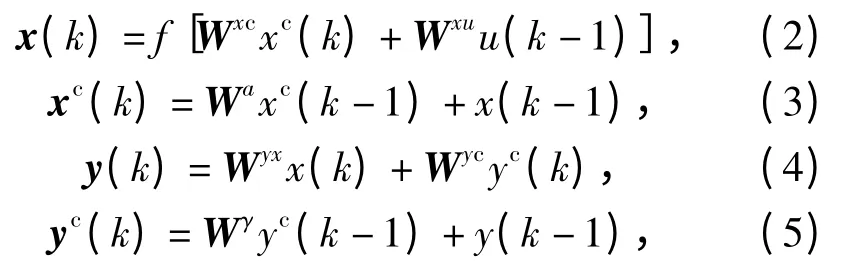
式中:Wxc,Wxu,Wyx,Wyc分别为隐层关联单元到隐层,输入单元到隐单元,隐单元到输出单元及输出层关联单元到输出单元的权矩阵;Wα=diag[α1,…,αn],Wγ=diag[γ1,…,γn]为自反馈增益矩阵;f 为Sigmoid 函数。
设第k 步系统的实际输出为yd(k),定义误差函数为将E 对连接权Wγ,Wyx,Wyc,Wα,Wxu,Wxc分别求偏导,由梯度下降法可得Elman 网络的学习算法为

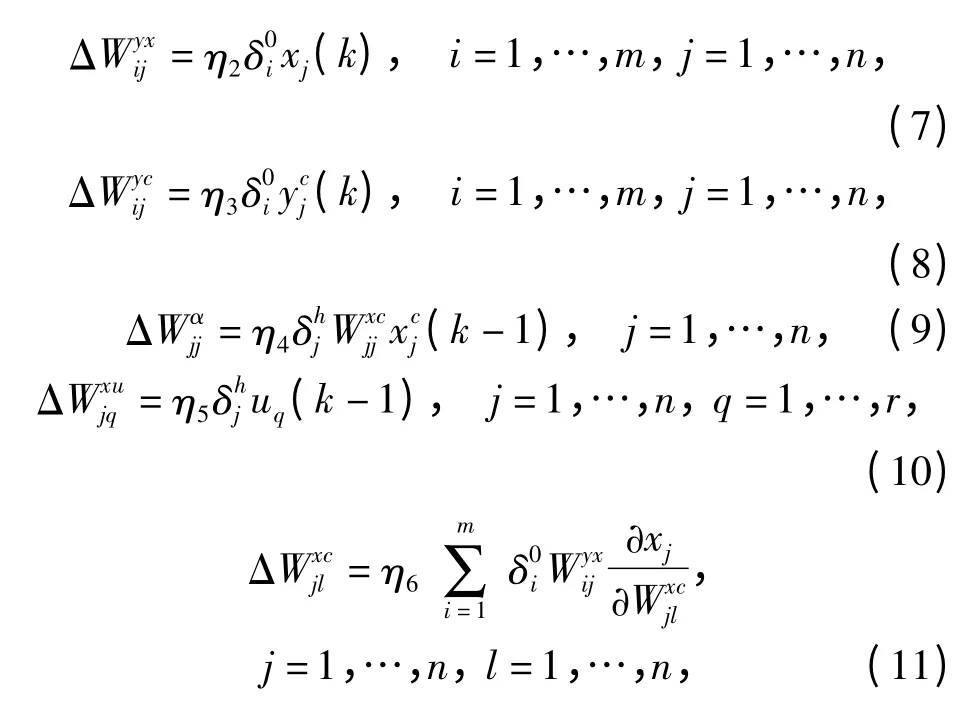
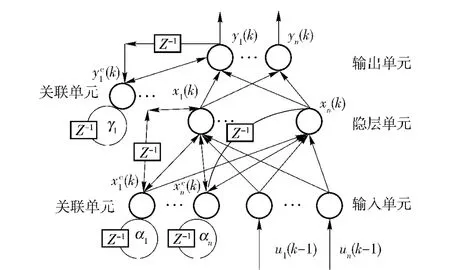
图2 改进型Elman 网络结构Fig.2 Structure of improved Elman network
3.2 基于改进型Elman 网络的信息系数分配方法
将第i 个子滤波器的估计误差协方差阵Pi进行特征值分解,即Pi=LΛiLT,其中Λi=diag{λi2,…,λiN},定义第i 个子滤波器的精度因子Ei=trΛi,它反映了第i 个子滤波器的滤波精度。定义第i 个子滤波器的故障因子ρi(k)=‖Zi(k)-Hi(k)Xi(k,k-1)‖,它反映了第i 个子滤波器的故障程度。令所有子滤波器的Ei,ρi和主滤波器的Em构成Elman网络的输入向量u={E1,ρ1,…,El,ρl,Em}T,令所有子滤波器和主滤波器的信息分配系数βi构成Elman网络的输出向量y={β1,…,βl,βm}T,则利用训练好的Elman 网络就可以进行信息分配系数自适应调节。根据精度越低,故障程度越大,分配的信息分配系数越大的原则[8-9],并结合联合Kalman 滤波器的仿真结果给出网络训练样本,进行离线训练。
为保证信息分配系数满足信息守恒原理,再对Elman 网络的输出进行修正
4 联合强跟踪Kalman 滤波器算法设计
4.1 联合滤波算法流程
结合图1,本文提出联合强跟踪Kalman 滤波算法如下:
1)给定初值
初值包括滤波估计初值,协方差阵P0,系统协方差阵Q0以及系统信息分配系数向量初值;
2)信息分配
利用改进的Elman 网络解算出新的信息分配系数向量,自适应调整信息分配系数,公共状态变量信息按信息守恒原理在各滤波器间进行分配

3)子滤波器进行时间更新和测量更新
①时间更新:各子滤波器根据各自的状态方程进行时间更新,算法如下
②测量更新:当有量测值时,各子滤波器根据量测值进行修正,即进行量测更新,算法如下
4)主滤波器时间更新
主滤波器根据自己的状态方程进行时间更新,算法如下
式中:L(k)为时变的渐消矩阵;λi(k)≥1,i =1,…,n,为n 个时变的渐消因子,
5)信息全局融合
在各滤波器计算出各自的局部估计之后,由主滤波器把各滤波器的公共状态和Pcm按照(23)式和(24)式进行信息的全局融合,得到全局估计信息

融合后,返回步骤2)作循环。
4.2 联合滤波算法的简化
应用模糊方法进行模糊加权系数的计算较为麻烦。在实际应用中,可以预先进行各种归一化输入量的模糊加权系数计算,并将计算结果存入计算机。在实时计算中只要将输入量按照同样的方法进行归一化,然后通过查表即可得到模糊加权系数的量值,而不必进行复杂的计算。相似系数本身在[0,1]内,无需再进行归一化;对于tr(Pk-1),可事先根据导航子系统滤波的实测值或理论计算值,得到导航子系统精度最差值,即tr(Pk-1)的最大值,将子滤波器的tr(Pk-1)除以最大值,由此可将tr(Pk-1)的归一化值约束在[0,1]内,从而完成归一化过程。
5 系统仿真
假定载机进行摇翼机动,横滚角的最大偏角为20°,机动周期为6 s,飞行速度200 m/s.子惯导陀螺常值漂移1°/h,随机漂移1°/h;加速度计常值偏置500 ×10-6,随机误差100 ×10-6.主滤波器初始信息分配系数为0.2,2 个子滤波器的初始信息分配系数为0.4,Elman 网络输入层节点数为5,隐层节点数取为8,输出层节点数为3,从而形成5 -8 -3 的网络结构,学习步长均选为0.15.
1)假定速度观测噪声是以二阶马尔可夫为随机过程的有色噪声。分别应用联合强跟踪Kalman滤波器和集中Kalman 滤波器对系统状态进行估计。图3给出了2 种滤波器的东、北、天向失准角估计误差(δφe,δφn,δφu)对比曲线,表1列出了2 种滤波器的对准精度。通过比较可以看出,联合强跟踪Kalman 滤波器在10 s 内对东、北、天向失准角的估计误差可以收敛到3'以内,估计精度比集中Kalman 滤波器要高,而对安装误差角和机翼挠曲变形角的估计精度比集中Kalman 滤波器要提高一个数量级。
图3 观测噪声为有色噪声时的2 种方法比较Fig.3 Comparison of two methods under coloured noise
2)假设速度传感器在10~15 s 之间发生故障而后恢复正常。使用本文的方法与使用集中Kalman 滤波器对东、北、天向失准角估计误差对比曲线,如图4所示。从图4中可以看出,使用联合强跟踪Kalman 滤波器时,速度传感器恢复正常后,滤波器迅速恢复正常工作,而使用集中Kalman 滤波器,滤波结果出现发散。这表明,使用本文的方法,系统对故障的鲁棒性较好。

表1 使用不同滤波器进行对准的对准精度对比(10 s 内)Tab.1 The comparison of alignment accuracy of two different filter (in 10 s)
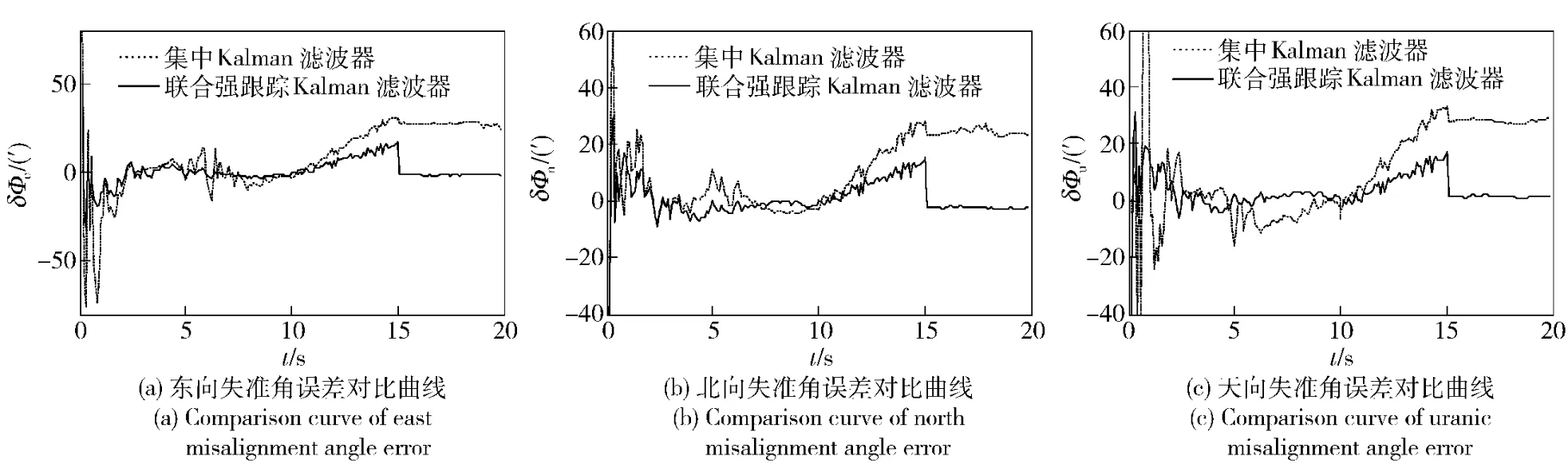
图4 速度传感器故障时的2 种方法比较Fig.4 Comparison of two methods when speed sensor malfunctions
由此可见,本文设计的联合强跟踪Kalman 滤波器显著减少了有色噪声对滤波器误差特性的干扰,且具有较强的故障鲁棒性,提高了系统状态估计精度和抗干扰能力,并大大减小了计算量,提高了滤波器的解算速度。
6 结论
本文提出了一种适用于快速传递对准的联合强跟踪Kalman 滤波器,它利用模糊加权系数对误差方差阵进行估计以提高传统STF 的滤波精度,并利用改进的Elman 网络进行信息分配系数的自适应调节。仿真结果表明该算法可以降低系统模型和噪声不确定性的影响,提高系统故障鲁棒性和对准精度,并大大减小计算量,提高解算速度。
References)
[1]Shortelle K J,Graham W R,Rabourn C.F-16 flight tests of a rapid transfer alignment procedure[C]∥IEEE Position Location and Navigation Symposium,Piscataway:IEEE,1998:379 -386.
[2]Joon Lyou,You-Chol Lim.Transfer alignment error compensator design based on robust state estimation[C]∥Transactions of the Japan Society for Aeronautical and Space Sciences,Tokyo:Japan:Society for Aeronautical and Space Sciences,2005:143 -151.
[3]GU Dong-qing,QIN Yong-yuan,PENG Rong,et al.Rapid transfer alignment using federated kalman filter[J].Transactions of Nanjing University of Aeronautics & Astronautics,2005,22(2):139 -143.
[4]付梦印,邓志红,张继伟.Kalman 滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.FU Meng-yin,DENG Zhi-hong,ZHANG Ji-wei.Kalman filtering theory and its application in the navigation system[M].Beijing:Science Press,2003.(in Chinese)
[5]王新国,许化龙,李爱华.一种应用于星光观测导弹姿态确定的强跟踪滤波算法[J].宇航学报,2008,29(3):873 -877.WANG Xin-guo,XU Hua-long,LI Ai-hua.A novel strong tracking EKF algorithm in application of missile attitude determination by star observations[J].Journal of Astronautics,2008,29(3):873 -877.(in Chinese)
[6]程向红,万德钧.分布式系统中捷联惯性系统动基座对准研究[J].中国惯性技术学报,2004,12(6):8 -12.CHENG Xiang-hong,WAN De-jun.Initial alignment of distributed strapdown inertial system on moving base[J].Jounal of Chinese Inertial Technology,2004,12(6):8 -12.(in Chinese)
[7]Carlson N A.Federated Kalman filter simulation results[J].Navigation,1994,41(3):297 -321.
[8]Jamshaid Ali,Fang Jian Cheng.SINS/ANS/GPS integration using federated Kalman filter based on optimized information-sharing coefficients[C]∥AIAA Guidance,Navigation,and Control Conf,Reston:AIAA,2005:6028 -6040.
[9]李金梁,吴训忠,张宗麟.基于矩阵摄动理论的联邦滤波信息分配方法[J].系统工程与电子技术,2007,29(11):1940-1944.LI Jin-liang,WU Xun-zhong,ZHANG Zong-lin.Information-sharing approach to federated filtering based on matrix perturbation theory[J].Systems Engineering and Electronics,2007,29(11):1940 -1944.(in Chinese)
[10]胡志强,张瑛,邱恺.基于故障概率的联邦滤波鲁棒信息分配方法[J].系统工程与电子技术,2008,30(9):1801 -1804.HU Zhi-qiang,ZHANG Ying,QIU Kai.Robust information sharing scheme for federated filter based on fault probability[J].Systems Engineering and Electronics,2008,30(9):1801 -1804.(in Chinese)
[11]HE Hai-tao,TIAN Xia.An improved Elman network and its application in flatness prediction modeling[C]∥Second International Conference on Innovative Computing,Information and Control,ICICIC 2007,Piscataway:IEEE Computer Society,2008:44 -48.
[12]REN Xue-mei,CHEN Jie,GONG Zhi-hao,et al.Approximation property of the modified elman network[J].Journal of Beijing Institute of Technology,2002,11(1):19 -23.
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
火控雷达技术(2016年2期)2016-02-06 02:29:00
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18