
CCD温度对星敏感器星点定位精度的影响
2009-12-12 05:29沈本剑刘海波杨建坤
空间控制技术与应用 2009年6期
沈本剑,刘海波,贾 辉,杨建坤,2
(1.国防科技大学理学院技术物理研究所,长沙410073;2.空间智能控制技术国家重点实验室,北京100190)
CCD温度对星敏感器星点定位精度的影响
沈本剑1,刘海波1,贾 辉1,杨建坤1,2
(1.国防科技大学理学院技术物理研究所,长沙410073;2.空间智能控制技术国家重点实验室,北京100190)
CCD噪声是影响星敏感器星点定位精度的误差源之一,以DV437-BU2型CCD为例,对CCD的暗电流、暗电流散粒噪声、暗电流不均匀噪声等的温度特性进行了实验测量.研究了CCD温度对星敏感器星点定位精度的影响,结果表明:对于DV437-BU2型CCD芯片,当CCD工作温度高于300 K时,降温可以显著提高星敏感器星点定位精度,当CCD工作温度低于300 K时,降温对星点定位精度的影响不明显;当温度由330K降到300K时,星点定位精度由0.12个像素提高至0.078个像素.
CCD;噪声;星敏感器;定位精度;致冷
星敏感器是一种高精度的姿态测量器件,通过探测天球上不同位置的恒星来确定卫星姿态,提供航天飞行器相对于惯性坐标系的三轴姿态[1].CCD星敏感器是以CCD芯片为光电探测系统的核心成像原件,其基本工作原理是以恒星为参照物,利用CCD相机拍摄到的星图经过恒星质心提取、星图识别和姿态估算等一系列计算,确定出星敏感器的视轴在天体空间的瞬时指向,从而确定飞行器的姿态[2].在CCD星敏感器完成一次测量过程中,星点提取精度的大小对最终的测量结果有着很大的影响.CCD噪声是影响星敏感器星点定位精度的误差源之一,CCD工作温度是影响CCD噪声的重要因素.研究CCD工作温度对星点定位精度的影响,对于提高星敏感器姿态测量精度有重要的意义.
美国部分星敏感器采用了致冷工艺,目前研制成功的AST-301星敏感器,采用致冷工艺,其姿态测量精度达0.18″[3],但未说明其控制的CCD工作温度.文献[4]提出了一种新的对CCD进行致冷的方案,但未对CCD温度对星敏感器星点定位精度的影响进行研究.
本文采用热电致冷技术,以DV437-BU2型CCD为例,进行了相关的CCD噪声实验.并研究了CCD的噪声-温度特性,计算了CCD温度对星敏感器星点定位精度的影响.得到CCD星敏感器合适的工作温度.
1 CCD噪声
CCD噪声包括暗电流散粒噪声、暗电流不均匀噪声、读出噪声、光子散粒噪声和光响应不均匀噪声等[5].本文针对暗电流散粒噪声、暗电流不均匀噪声以及读出噪声三种主要噪声进行了相关的实验.
暗电流散粒噪声:半导体热运动产生载流子,形成暗电流是一种随机的过程,可以采用Piosson分布进行描述[6].
暗电流不均匀噪声:由于CCD各像元在制作工艺上的差异,使得各像元产生的暗电流不是均匀分布的.在CCD阵列中,局部晶格缺陷或杂质的存在还可造成暗电流尖峰[7].在星敏感器应用中,暗电流尖峰会严重影响星敏感器的星点定位精度,因此,必须尽量降低CCD的暗电流不均匀噪声.
读出噪声:信号电荷通过读出电路将信号电荷转换为信号电压,并进行读出时,在CCD测量信号中也将引入不确定性,所有的这些噪声成分构成读出噪声,它代表在量化过程中引入的误差[8].
光子散粒噪声:光照射到CCD光敏区转换为光电子,产生信号电荷的过程可看着独立、均匀连续发生的随机过程[9].单位时间内光产生的信号电荷数目并非绝对不变,而是在一个平均值上有微小的起伏.这一微小的起伏便形成了噪声.
光响应不均匀噪声:光响应不均匀噪声,是由于CCD图像传感器的各个像元对光子的响应存在着微小的差别,形成了光响应不均匀性[10].
2 CCD噪声测量
2.1 20℃与-10℃输出图像的比较
实验采用Andor公司的DV437-BU2型CCD芯片和相关配套设备.DV437-BU2型CCD芯片的相关参数如表1所示[11].

表1 DV437-BU2型CCD的相关参数
在黑暗环境中,盖上CCD的镜头盖,分别在不同温度条件下,多次重复测量各像元的输出值.在测量过程中,对CCD进行热电致冷时,由于温度的降低可能导致CCD面结露,为避免CCD结露对测量结果的影响,应在CCD致冷平衡一段时间后再进行测量.图1和图2分别给出曝光时间为1s,CCD工作温度为20℃和-10℃时,像元输出灰度直方图.
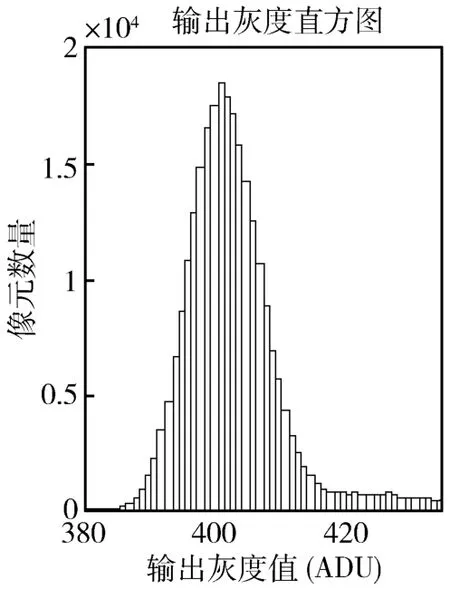
图1 20℃时输出灰度直方图

图2 -10℃时输出灰度直方图
由图1和图2可以看出,当CCD温度为20℃时,CCD输出的灰度值平均值较大,而且输出灰度的方差较大,而且有部分偏离430ADU,当CCD温度为-10℃时,CCD输出的灰度平均值降低,输出灰度值的方差较小.
实验观察到降低CCD工作温度可以减小坏点(hot pixel)的影响.图3和图4分别给出曝光时间为1s,温度为20℃和-10℃时所观测到的坏点大小.当CCD工作温度为20℃时,像元(285,409)附近观察到4个坏点,如图3所示;而当CCD工作温度降到-10℃时,坏点数量减小到2个,如图4所示.
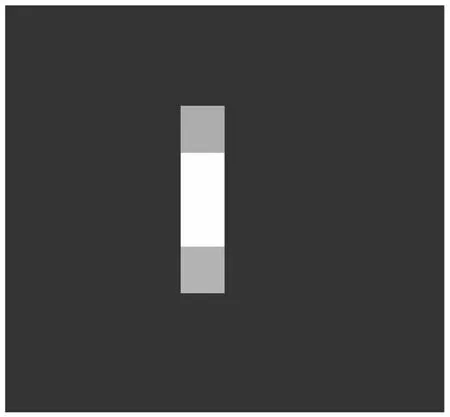
图3 20℃时9×10像元内的坏点大小
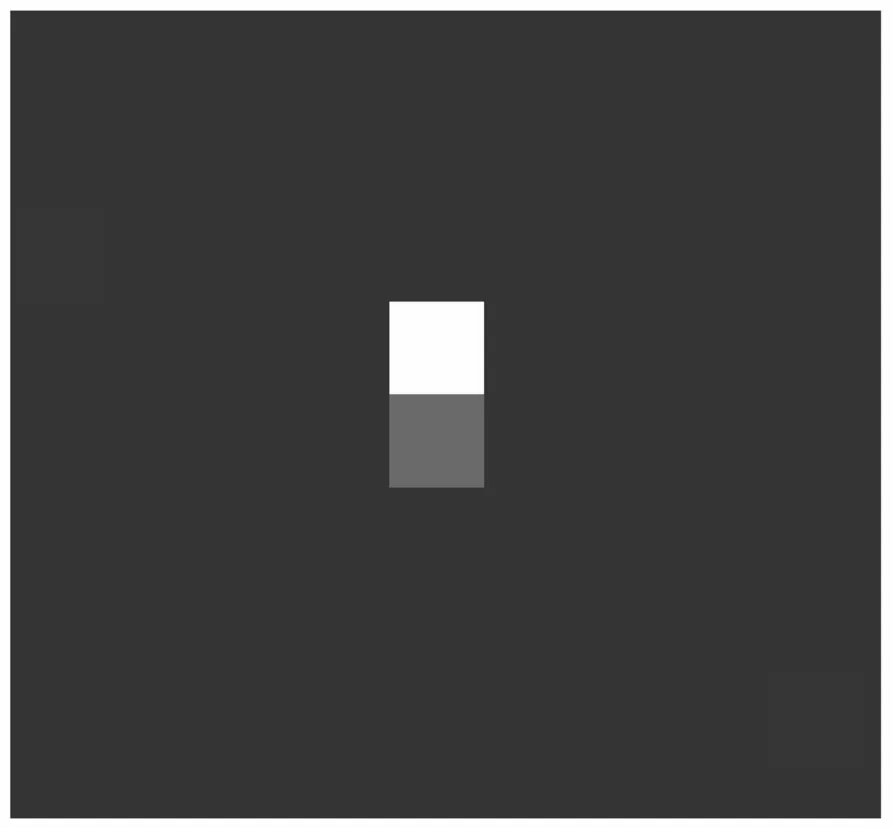
图4 -10℃时9×10像元内的坏点大小
2.2 测量数据处理
在同一温度条件下,对于多次重复拍摄的图像,计算出各个像元噪声的统计平均值,得到该温度条件下的噪声大小.试验测得DV437-BU2型CCD的暗电流与温度的关系,暗电流散粒噪声、暗电流不均匀噪声与温度的关系以及像元输出的总噪声(暗电流散粒噪声、暗电流不均匀噪声和读出噪声的和)与温度的关系如图5~7所示.
图5给出DV437-BU2型CCD,在不同温度条件下,实验测得的暗电流大小.

图5 暗电流与温度的关系
图6给出实验测得DV437-BU2型CCD,在曝光时间为1s时,暗电流散粒噪声和暗电流不均匀噪声与温度的关系.
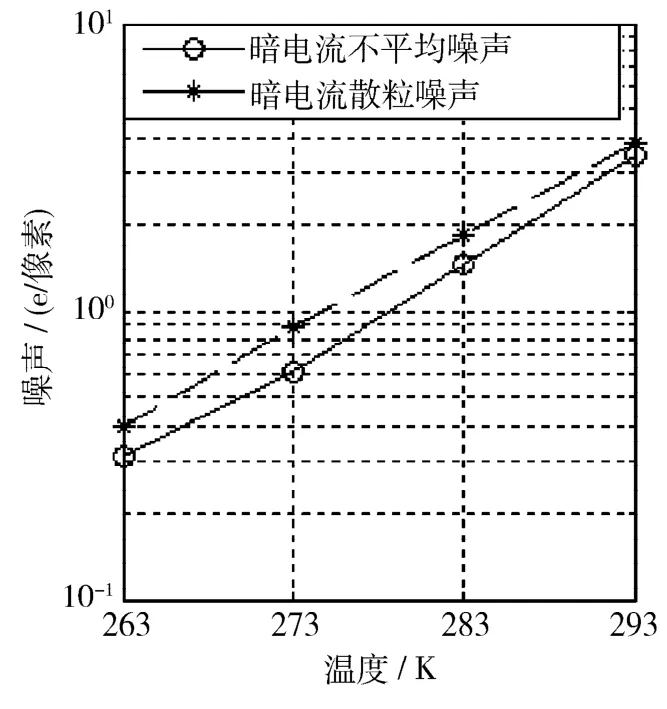
图6 暗电流散粒噪声,暗电流不均匀噪声与温度的关系
由图5和图6可以看出,CCD暗电流,暗电流散粒噪声,暗电流不均匀噪声随CCD温度的增加而呈指数型增加,因此,降低CCD工作温度,可以有效的降低CCD噪声.
图7给出在曝光时间为1s时,DV437-BU2型CCD各像元输出的总噪声与温度的关系.
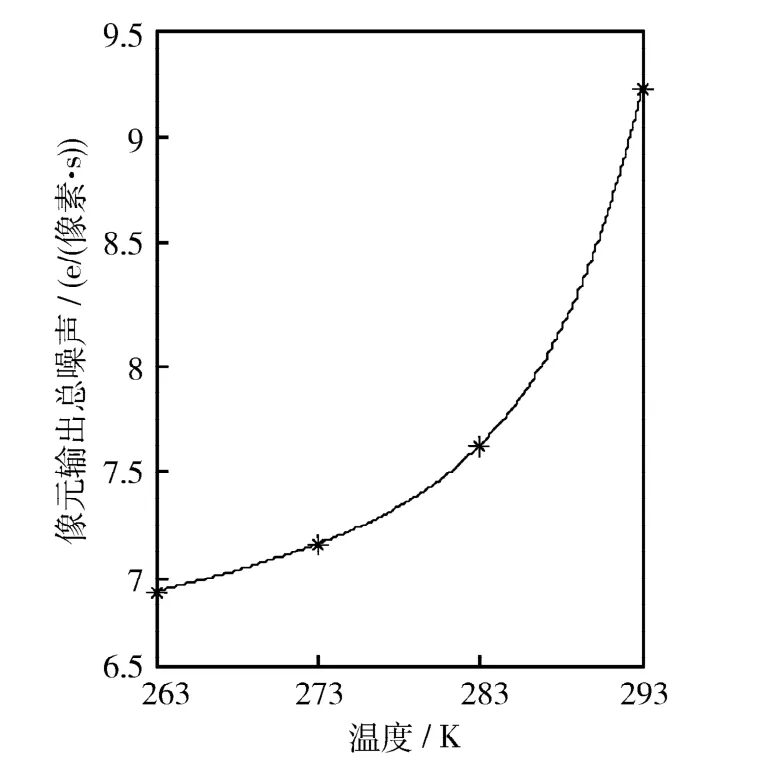
图7 CCD像元输出的总噪声与温度的关系
由图7可以看出,当CCD工作温度较高时,降低CCD工作温度可以有效的降低CCD噪声,但当CCD工作温度较低时,降低CCD温度对减小CCD噪声的效果不明显,因为此时的CCD噪声主要为读出噪声.
3 CCD噪声对星敏感器星点定位精度的影响
3.1 星点提取的亚像元质心算法
星敏感器星点提取一般采用亚像元质心算法.理论上,星像点的能量分布服从二维Gaussian分布[12],表示为

I(x,y)为质心在(x0,y0)的恒星光斑在(x,y)处的光功率,I0为光斑的总功率,σPSF为光斑能量分布的Gaussian宽度.通过亚像元质心算法,计算得到星点位置(xa,ya):

xij,yij表示星点光斑第(i,j)个单元在CCD像元内的坐标,Uij表示第(i,j)个单元的像素值.
3.2 CCD工作温度对星点定位精度的影响
当存在CCD噪声时,由于CCD噪声的影响,使得计算的星点质心与真实位置出现偏差.文献[12]给出了采用5×5像元的亚像元质心算法时,各类噪声对星7点定位精度的影响,如表2所示.
表2中,L0表示5×5像元的信号电荷总量;N表示各类噪声的大小.由表2中各项噪声对星点定位精度的影响公式可以看出,减小各类噪声,可以提高星敏感器星点定位精度.
星敏感器工作温度范围一般为-30℃~60℃[13],将DV437-BU2型CCD运用于星敏感器,星敏感器探测器部分参数如下:孔径20mm,镜头透过率0.70,星点弥散斑大小约为5×5像元.
将实验数据代入表2的各项中,取σPSF为0.7像元,采用5×5像元的星点质心提取算法,在6.5等星照射,曝光时间为200ms的情况下,温度与星点定位精度的关系如图8和图9所示.
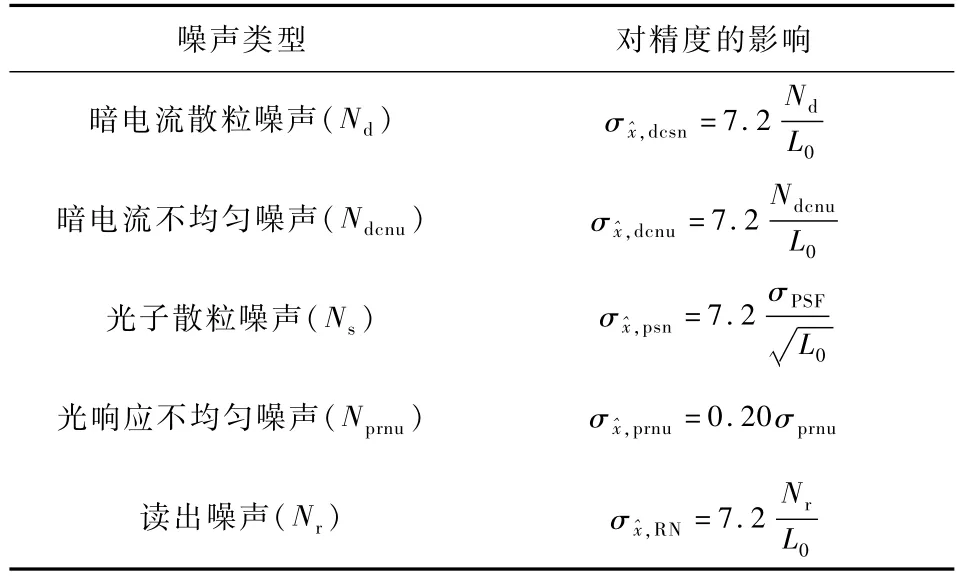
表2 CCD噪声对星点定位精度公式

图8 暗电流散粒噪声和暗电流不均匀噪声对星点质心定位精度的影响
图8给出了在仅考虑CCD暗电流散粒噪声和暗电流不均匀噪声的情况下,星点质心定位精度与CCD温度的关系.图9给出了考虑CCD噪声时,CCD温度对星点质心定位精度的影响.由图8可以看出,当仅考虑CCD暗电流散粒噪声和暗电流不均

图9 温度对星点定位精度的影响
匀噪声时,降低CCD工作温度可显著提高星点质心定位精度.由图9可看出,当CCD工作温度较高时,适当降低工作温度,可以提高星敏感器星点定位精度,当温度为330 K时,星点定位精度约为0.12个像元,当温度降到280 K时,星点定位精度约为0.078个像元.对于DV437-BU2型CCD,当CCD工作温度在300 K以上时,降低CCD工作温度可以明显提高星敏感器星点定位精度,当温度低于300 K时,读出噪声将成为影响星敏感器星点定位精度的主要因素,降温对提高星敏感器星点定位精度的作用不大.
4 结 论
本文对CCD进行了噪声实验,测量了DV437-BU2型CCD在不同温度下的暗电流散粒噪声、暗电流不均匀噪声和读出噪声,并将其应用于星敏感器,计算了在6等星照射的情况下,CCD噪声对星敏感器星点定位精度的影响.结果表明,适当降低CCD的工作温度,可有效提高星点定位精度:例如,在3 00 K以上,降低CCD的工作温度可以明显提高星点定位精度,当温度低于300 K时,降温对星点定位精度的影响不大.由于各个型号的CCD芯片,其噪声-温度特性相似,因此,可参照本文的方法,采用热电致冷技术,将星敏感器的探测器件的工作温度控制在其适当的范围,可有效提高星敏感器星点定位精度.
[1] 王晓东.大视场高精度星敏感器技术研究[D].中国科学院研究生院,2003
[2] 欧阳桦.基于CCD星敏感器的星图模拟和导航星提取的方法研究[D].华中科技大学,2005
[3] Van B R.SIRTF autonomous star tracker[J].Proceedings of SPIE-The International Society for Optical Engineering,2002,4850(1):108-121
[4] 王彦,袁家虎.一种提高CCD探测灵敏度的方法[J].光电工程,2000,27(6):5-8,65
[5] Janesick JR,Elliott T,Collinss,et al.Scientific chargecoupled devices[J].Opt.Eng.,1987,26(8):692-714
[6] 王以铭.电荷耦合器件原理与应用[M].北京:科学出版社,1987:105-106
[7] 许秀贞,李自田.CCD噪声分析及处理技术[J].外与激光工程,2004,33(4):343-346,357
[8] 王书宏.天文CCD相机的噪声分析与信噪比模型的研究[J].半导体光电,2007,28(5):731-734
[9] 王帅.CCD器件的特性评价及其驱动和数据采集电路设计[D].浙江大学,2006
[10] 李彬华.科学级CCD特性以及相机结构研究[D].中国科学院国家天文台,2003
[11] Manual of Andor DV437-BU2[Z].Andor,2005
[12] Hancock B R,Stirbl R C,Cunningham T J,et al.CMOS active pixel sensor specific performance effects on star tracker/imager position accuracy[J].Proc.of SPIE,2001,4284:43-53
[13] Blarre L,Piot D,Jacob P,et al.SED16 autonomous star sensor product line in flight results,new developments and improvements in progress[C].AIAA Guidance,Navigation,and Control Conference,San Francisco,CA,USA,Aug.15-18,2005.
CCD Chip’s Temperature Effect on Position Accuracy of Star Sensor
SHEN Benjian1,LIU Haibo1,JIA Hui1,YANG Jiankun1,2
(1.National University of Defense Technology,Changsha 410073,China;2.National Key Laboratory of Science and Technology on Space Intelligent Control,Beijing 100190,China)
CCD noise is an error source of guide star position of star sensor.The DV437-BU2 CCD chip’s dark current,dark current shot noise and dark current non-uniformnoise characteristics of temperature have been measured in this paper.The effect of CCD chip’s temperature on star position accuracy has been researched.The results show that decreasing CCD chip’s temperature could improve the star position accuracy effectively when the temperature is higher than 300K,but could not remarkably when the temperature is lower than 300K.The star position accuracy level is improved from 0.12 pixel to 0.078 pixel when the temperature reduces from 330K to 300K.
CCD;noise;star sensor;position accuracy;refrigeration
2008-10-10
沈本剑(1984—),男,四川人,硕士研究生,研究方向为光学检测(e-mail:shenbenjian@163.com).

V248.21
A
1674-1579(2009)06-0036-05
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
电脑爱好者(2021年5期)2021-03-10
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
科技视界(2019年15期)2019-07-23
北京航空航天大学学报(2019年4期)2019-05-05
中国惯性技术学报(2019年6期)2019-03-04
安徽农业科学(2015年21期)2015-10-21
光学仪器(2014年2期)2014-07-08
