
水下机器人自救系统的研制
2008-04-24 05:06张钦,徐国华,向先波
中国舰船研究 2008年4期
1 引 言
AUV作为人类在海洋活动,特别是深海活动中的重要替代者和执行者,已被广泛应用于科学考察、深海作业、打捞救生等领域,其应用前景极其广泛。但AUV的深海作业环境是非常恶劣的,时常面临着各种各样的危险。研制一台AUV需要大量的人力物力资源,而且每次实验或作业所获得的资料或数据具有极大价值,对于载人机器人还有生命保护任务。如果因故障造成AUV失事沉入海底,将会造成极大损失,对海洋开发或研究是一个沉重的打击,因此,AUV的自救系统也成为AUV的关键设备之一[1,2]。
本文针对复杂海洋环境为某一探测AUV研制出1套高可靠性自救系统。
2 自救系统工作原理及方案设计
2.1 自救系统工作原理
水下机器人的自救,其实是AUV机器人通过某种手段使自身在面临危险状况时能够快速上浮至水面而获救。根据水下机器人的水下作业环境,分析其可能出现的各种故障和风险。
自救系统装置作为一个相对独立的子系统安装在机器人主体上,在机器人下水前配置好自救用的压载物和救生信标。当机器人在水下出现故障不能正常上浮时,水面工作人员通过水声装置发送自救命令,一旦自救系统接收到水声自救命令,自救控制器就驱动自救执行机构抛出压载物,为机器人提供足够的浮力而使其能上浮。当机器人上浮到一定深度后,自救系统释放出信标及强力缆绳浮到水面,借助信标内的GPS和无线电电台向母船发出位置信号,待母船发现后,抓住信标上所附的强力缆绳,用吊车或绞车将浮出水面的水下机器人回收,从而实现机器人的自救[3]。
2.2 自救系统方案设计
根据系统应用实际要求,自救系统需要独立机器人主体而自成系统,本文自救系统主要包括电源部分、通信及通信单元、控制单元、驱动单元、释放机构及信标。其中,通信及通信单元主要用来与水面母船和水下机器人主体进行信号传输;控制单元完成命令判断、数据处理等功能;驱动单元接受控制信号产生足够的驱动功率来使释放机构完成相应动作;释放机构单元是特定的机械机构,能够顺利完成释放动作;信标单元包括无线电电台、GPS模块、频闪灯等,用来浮出水面后给机器人定位和帮助母船搜索目标。其方案具体框图见图1。

图1 水下机器人自救系统框图
2.3 水下机器人自救系统关键技术分析
自救系统是水下机器人水下作业安全的重要保证,本文分析其具体实际应用及方案设计,总结出其涉及的关键技术如下:
1) 复杂海洋环境下可靠自救技术
海洋环境与陆地不同,其自然条件十分苛刻,除海面上变化莫测的惊涛骇浪之外,随着海中深度的增加而产生的压力和温度的变化也十分剧烈,并且机器人在海底作业过程中,还可能遇到不可知状况,比如不规则暗流、淤泥、海底地震活动等。这就要求自救系统必须具有高可靠性,在恶劣的环境中也能顺利完成自救任务[4]。
2) 深海可靠释放压载及信标技术
本文方案是采用抛载的方式来实现机器人的自救,因此抛载的成功是整个自救系统顺利完成任务的重要保障,而深海抛载装置涉及到耐压和密封等相关问题,因此在系统实现过程中要对这些问题分析和解决。
3) 自救系统小型化、低功耗、工程化技术
由于自救系统是安装在水下机器人外壳表面,其体积有一定的要求;并且其自带电源,具有相对独立性,因此要求自救装置具有小型化、低功耗等特点。
3 系统方案实施
3.1 系统硬件结构组成
本文系统硬件结构框图见图2。
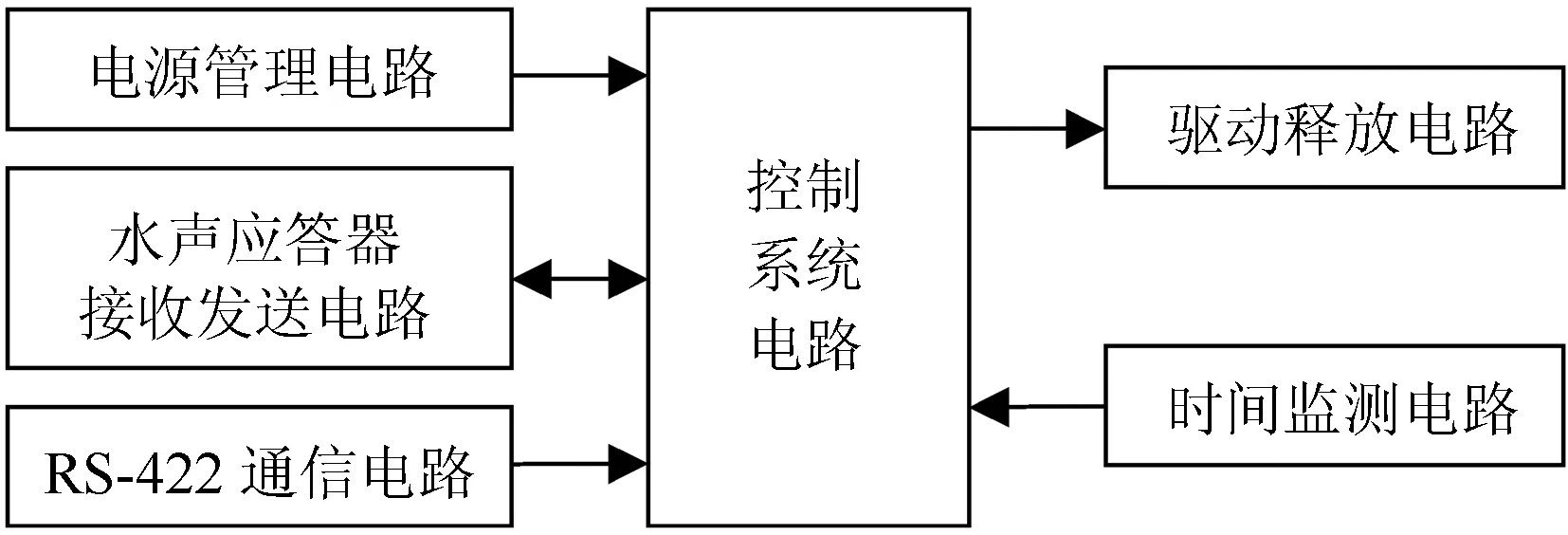
图2 自救系统硬件框图
1) 电源选型
本文所研制的自救系统自带电源,要求所选用电池能量体积比高、安全可靠、方便使用。
对比各种电池特点,本文选用锂子电池供电。其具有体积小、容量大、输出电压高、比能量高、放电电压稳定、工作温度范围宽、自放电率低、储存寿命长、无记忆效应等优点。具体电池型号选用武汉力兴电源公司出品的ICP11S型锂离子电池,其性能指标如下:额定电压为3.6 V;充电终止电压为4.2 V;工作温度为充电0~45℃,放电-20~60℃;容量为11 A·h。
2) 电控驱动器
用于接收控制信号,将电能转换为机械能,从而驱动释放执行机构动作,一般为电机、电磁铁、爆炸螺栓等。本文考虑到系统可靠性及小型化要求,选用美国远洋电子公司(Pelagic Electronics)的1810 A系列深海电螺线管,其已经被用于伍尔霍兹海洋研究院的“阿尔文”号潜器以及其他工程应用中。
1800A系列深海电螺线管是Pelagic Electronics公司生产的一种独特的开放式设备,能够在任何海洋深度下工作。它能够提供一系列可变的拉(推)力,用于释放重物或仪器,操作机械连杆,或打开配套的设备。同时,它能够通过声学驱动,再辅以继电器或定时器,从而在长期的命令或释放系统中得到了广泛的应用。当在电螺线管的内部或外部中配备1个弹簧,它就能够重复地工作。这是它与其他深海应用的驱动装置相比最大的优点。具体性能参数见表1。
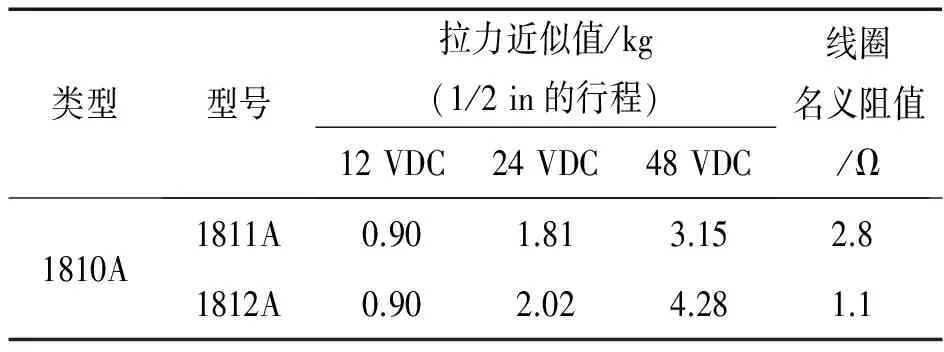
表1 电螺线管机电参数

图3 电螺线管
3) 释放机构
完成释放动作的机械装置,其主要包括压杆、摇杆和电螺线管等。具体构成如图4。当电螺线管接受释放驱动信号动作,其内芯柱塞回缩,摇杆由于压载的重力将滑向电螺线管,压杆也将被抬起。摇杆与压载相连端是一缺口状,当摇杆滑到一定距离时,压载将脱离摇杆的连接,从而完成压载的释放。

图4 释放机构
4) 控制单元电路
主要用来产生时序控制脉冲,包括:释放压载1脉冲信号、释放压载2脉冲信号、释放信标脉冲信号和给发送机电脉冲信号(图5)。
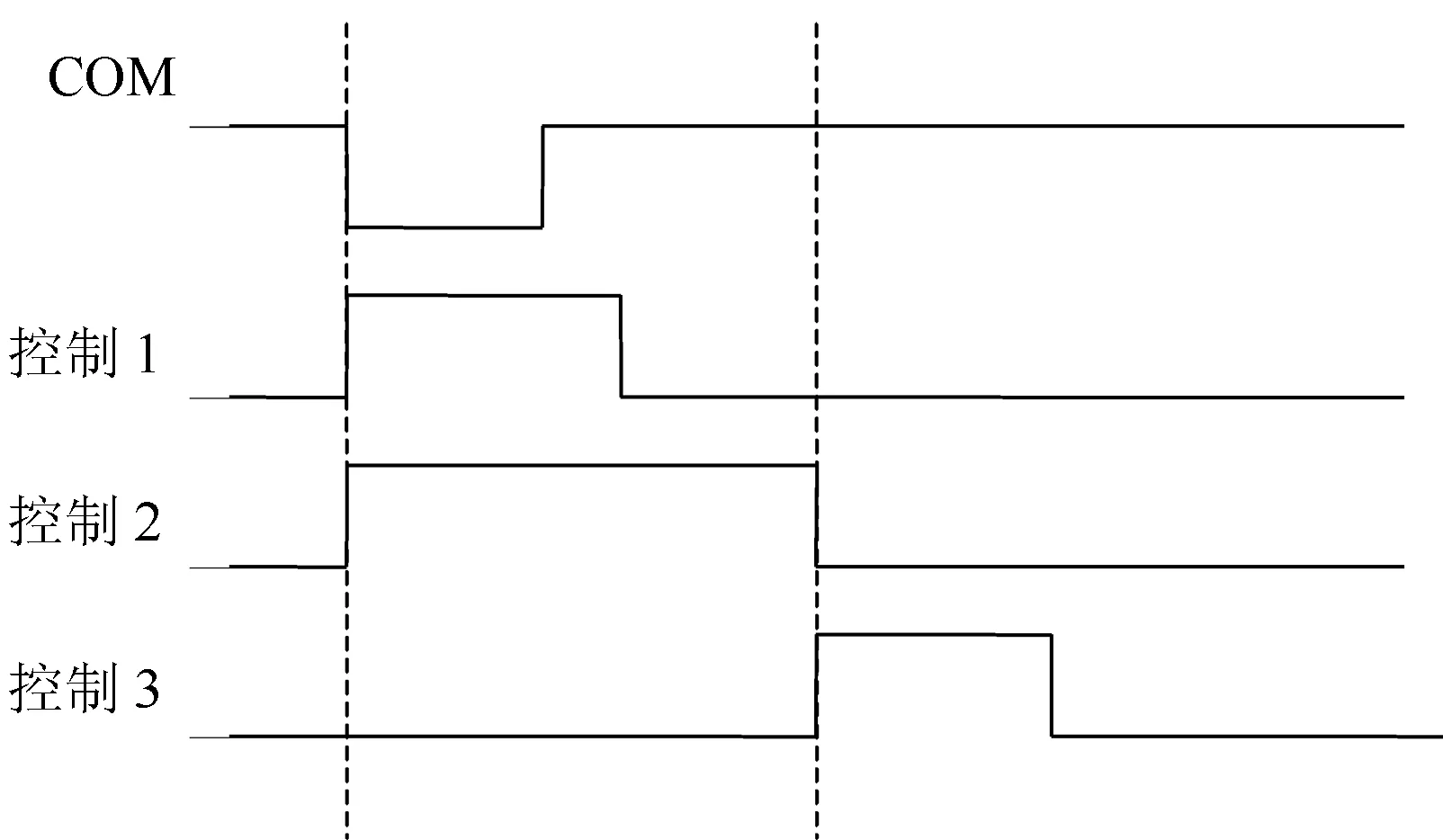
图5 时序控制信号图
其中COM、控制1、控制2、控制3分别表示:自救命令信号、释放压载1和压载2脉冲控制信号、给水声应答器上电脉冲控制信号、释放信标脉冲控制信号。自救命令下降沿触发释放压载1和压载2的脉冲控制信号及水声应答器的上电脉冲控制信号,由于信标是在机器人上浮到接近水面时才允许释放,所以其释放控制信号是由水声应答器上电脉冲控制信号的下降沿来触发的。释放控制脉冲脉宽为1 s(压载释放和信标释放),水声应答器上电脉冲脉宽为10 s(初设值,实际具体值需根据水下机器人工作水深来确定)。
控制单元电路是自救系统的核心,用来响应水声命令并控制执行器完成相应动作。因此它是自救系统顺利完成自救任务的关键,必须保证其具有高可靠性,对此本文采用两种相对独立的控制方案:
▲ 采用以微控制器为核心的程序控制模块;
▲ 采用以单稳态触发器为核心的非程序时序发生模块。
其中,以微控制器为核心的程序控制模块采用低功耗单片机MSP43F149为控制器,配套相应的外围电路实现控制任务。以单稳态触发器为核心的非程序时序发生模块采用CMOS芯片CD4538和双555定时器NE7556为核心,构成4个单稳态触发器,分别完成在不同时间段控制释放压载1、压载2、信标和给水声应答器发送机上电。
5) 时间监测电路
用来保证自救系统具有一定的自主自救能力。一般水下机器人在水下作业的时间是有限的,一旦自救系统出现故障不响应任何水声命令而执行自救任务时,水面工作人员可以等待设定的定时时间到,此时,时钟芯片将触发单片机控制模块和模拟控制模块实施自救任务。本文选用PHILIPS公司生产的低功耗CMOS实时时钟/日历芯片PCF8563,其提供1个可编程时钟输出,1个中断输出和掉电检测器,所有的地址和数据通过I2C 总线接口串行传递。
3.2 控制系统的软件体系结构
为了保证系统的可靠性和实时性,本课题软件设计采用实时操作系统结构,选用源代码公开的嵌入式实时操作系统uC/OS-II。uC/OS-II是完全占先式的实时内核,支持多任务操作,并且每个任务都有自己单独的栈空间。
uC/OS-II还提供很多系统服务,例如信号量、消息邮箱、事件标志组、内存管理等,并且和支持多达255层的中断嵌套。利用这些系统服务可以完成各种复杂逻辑的要求,从而缩短开发周期,降低开发成本。同时,uC/OS-II具有良好的可扩展性和可移植性,使其能够广泛地应用在各种架构的微处理器上[5]。
在uC/OS-II操作系统的基础上,将自救系统所需要完成的功能划分为几个任务,根据自救任务的需要以及出于高可靠性的考虑,自救系统必须包含以下功能:
1) 当水声应答器接收指令后,自救控制器必须解析指令并完成相应的动作。
2) 自救控制器可以通过水声应答器和水面通信,报告系统状态及完成指令动作情况。
3) 自救系统具有通过串口通信接口,以方便在岸上系统调试,也是水下机器人主体与自救系统的通信接口。
4) 当由于某种不可预见的原因造成所有通信装置都失效时,机器人石沉大海,这时自救系统可以根据超出预定时间,自动执行自救任务。
5) 由于海上试验的需要,释放任务不是一次就完成的。启动电螺线管释放压载或浮球,可以分别单独进行。
6) 自救系统不工作时,处于低功耗待机状态。
出于以上的考虑,将系统划分成4项普通任务和3项中断任务共计8项任务,此外还针对uC/OS-II的空任务进行了低功耗设计。具体任务包括:命令解析任务;释放压载1或2;释放压载1和2;释放信标;水声命令接收中断任务;外部定时器中断任务;串口通信中断任务。
系统软件结构见图6。
4 结 语
本文主要从系统的可靠性、低功耗、小型化等相关关键技术出发,探讨了水下机器人自救系统实现的原理、方案设计及方案具体实现等。本文在进行实验室调试过程中,各模块功能均能正常工作,并且通过长时间大量试验验证,系统符合设计要求且满足实际应用需要。
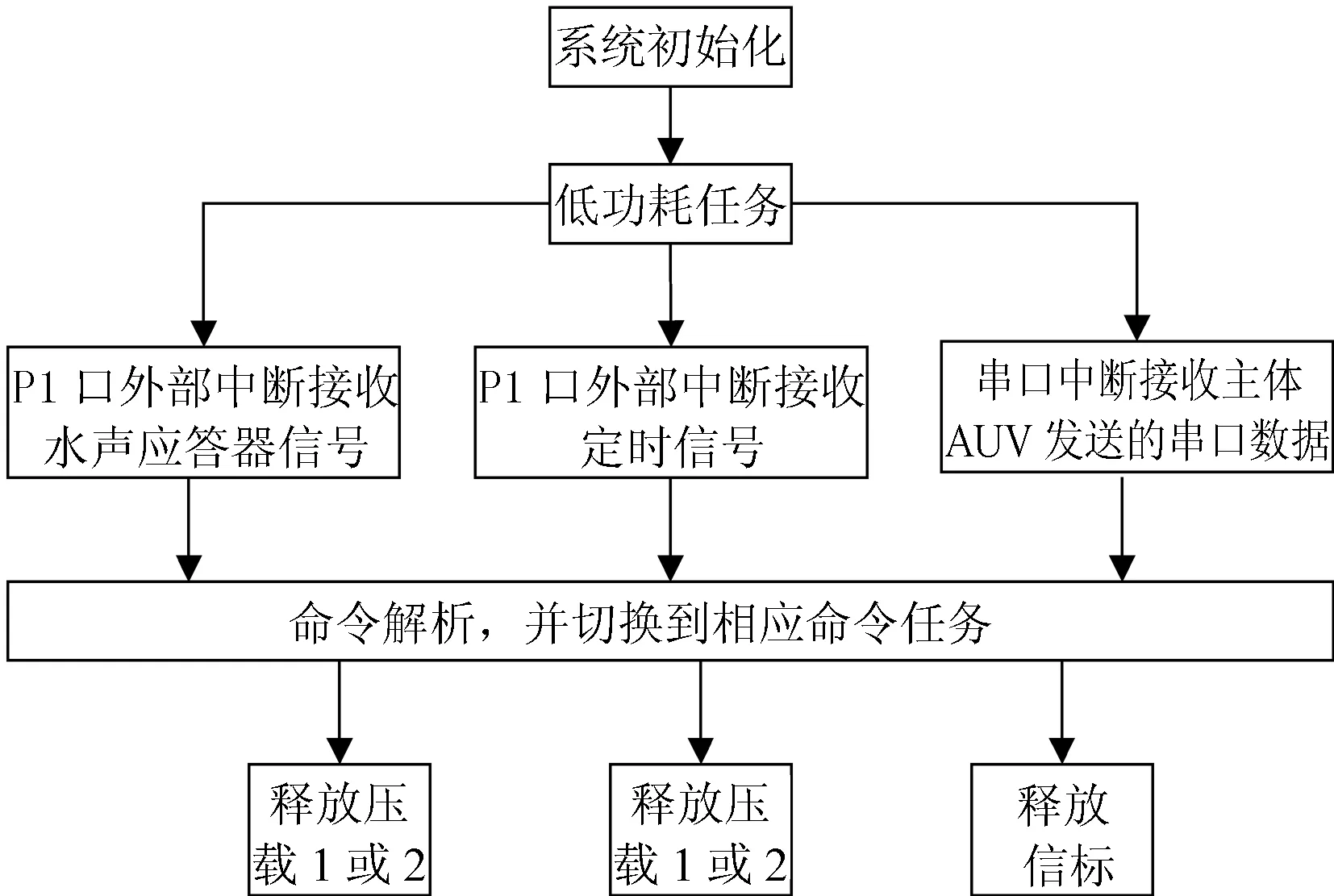
图6 自救系统软件结构
[1] 蒋新松,封锡盛,王棣棠.水下机器人[M].辽宁:辽宁科学技术出版社,2006.
[2] 李 晔,常文田,孙玉山,等.自治水下机器人的研发现状与展望[J].机器人技术与应用,2007(1):25-31.
[3] 向先波,徐国华,蔡涛,等.水下机器人智能自救系统[J].华中科技大学学报(自然科学版),2006,34(7):111-114.
[4] 徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,1(3):1-4.
[5] LABROSSE J J.嵌入式实时操作系统uC/OS-II[M].第二版.北京:北京航空航天大学出版社,2003.
猜你喜欢
广东教学报·教育综合(2022年45期)2022-05-05
广东通信技术(2022年3期)2022-04-25
辽宁大学学报(自然科学版)(2021年4期)2022-01-10
铁路通信信号工程技术(2021年12期)2021-12-31
初中生学习指导·中考版(2021年2期)2021-09-10
铁道通信信号(2020年9期)2020-02-06
课程教育研究·学法教法研究(2017年2期)2017-04-26
电子制作(2017年19期)2017-02-02
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17
