
液化天然气船船体极限强度分析
2008-04-24 05:47贺双元,吴卫国,甘进
中国舰船研究 2008年6期
1 引 言
液化天然气船(LNG船)是一种高技术高附加值船,在经过70年代和90年代两次建造高潮后,世界LNG船队已达到相当规模(131艘)。与此同时,LNG船型开始向100 000 m3以上船型发展,开始出现148 000 m3的LNG船舶。据统计,随着各国对环境保护意识的增强和对干净能源需求量的增加,世界LNG海运总量从1999年的9 000万吨增加到2004年的1.3亿吨,预计到2010年将增加到1.7亿吨以上,且2010年以后每年的新船需求量将达到85艘。随着运输里程的增长,LNG船舶将会进一步向大型化发展[1-2]。
和普通船体一样,LNG船也是由加筋板格组成的细长体箱型梁结构,它承受着由自重、货物和波浪浮力引起的剪力和弯矩作用。船体抵抗纵向弯曲/剪力载荷的能力即为船体总纵强度,它是船体结构最基本的强度[3]。当前船级社对船体的安全评估和设计准则是采用舯剖面始屈弯矩值,同时考虑局部构件的屈曲影响。大量事故和实测证明,传统的基于线弹性应力计算的设计准则没有考核船体的真正极限承载能力,因而无法解释在船体发生破坏前局部构件失效带来的后果。在船舶结构设计中,合理的船体梁强度分析应包含确定其真实的极限弯曲强度,即最大抵抗外加弯矩的能力。在这个基础上,才能确定船体极限承载能力与最大期望弯曲能力之间的真实安全余量[4]。LNG船的建造技术要求高,造价昂贵,对安全、可靠性更有一些特殊的规定。目前,世界上能设计建造这类液化气船的国家还不多,对LNG船的船体结构强度分析就更少,因此,对LNG船的总纵极限强度的关注是很有意义的。本文将分别用MSC/Marc程序和简化方法对1艘LNG船进行极限强度的分析。
2 计算理论
2.1 弧长法计算原理
应用有限元做结构的极限强度破坏分析时,必须选择正确的方程求解方法。该方法必须能够跟踪整个结构平衡路径,即能够跨越屈曲分叉点或极限强度点,进行后屈曲/后极限强度响应分析。Marc程序提供了弧长求解方法(Arc—length solver),它能够用来解决上述问题。
弧长法是增量线性有限元分析中,沿着平衡路径迭代位移增量的大小(也叫弧长)和方向,确定载荷增量的自动加载方案,用于分析非线性屈曲失稳问题。与特征值提取法的屈曲分析相比,弧长法分析屈曲问题不仅考虑刚度奇异的失稳点附近的平衡,而且通过追踪整个失稳过程中实际的载荷及位移关系获得结构失稳前后的全部信息[5]。
失稳路径的弧长法是求解包含各种非线性因素影响的力平衡方程的常用方法,是逐个加载增量步地求解这一非线性平衡方程,也就是说在每个增量步内按给定的载荷增量(载荷控制)或给定的位移量(位移控制),迭代出系统的平衡方程,从而追踪出结构真实的加载路径。
在增量加载分析中,按载荷控制的加载方式和按位移控制的加载方式,有时不可相互替代。比如对结构极限载荷的分析,由于极限载荷是未知量,采用载荷控制的加载方式按事先规定的载荷增量步长加载时,一旦所施加载荷大于结构的极限载荷,就会使刚度矩阵奇异,导致求解失败。只有用足够小的载荷增量逐渐逼近极限载荷,才能获得极限载荷的近似值。但这需要多次反复试算出合适的加载步长,很不方便。对极限载荷问题,采用位移控制的加载方式分析更为有效。
(1)


(2)

2.2 SUS法计算原理
本文应用了基于逐步破坏法的船体总纵极限弯矩的简化方法[7],假设船体横向骨材足够强,因而板架的整体破坏不会发生;假设船体材料为理想弹塑性材料;采用平断面假设,断面上应变为线性分布;计算时将船体断面划分成由板格单元和硬角单元组成的离散化模型,并假设单元之间相互独立。
用简化方法计算时,加载的方法为逐步增加船体梁的曲率。对每一个曲率值,根据平断面假设以及船体断面瞬时的中和轴可得到断面上每一单元的应变,由单元的特征曲线又可进一步得到单元上的应力。断面所有单元上的应力对瞬时中和轴取矩后,其总和即断面的弯矩。逐步增加曲率进行一系列计算后,可得到弯矩—曲率曲线,曲线斜率为零的点所对应的弯矩值Mu即为总纵极限弯矩[8]。
3 计算模型
以某实际LNG船为例,其船舶主尺度见表1,船体板材均采用A级钢,所有钢材的屈服应力是235 MPa。

表1 LNG船主尺度
由于该船船体结构的复杂性,以及计算机资源的受限性,难以实现整船或舱段的有限分析。为了得到简化而有效的模型,假设强肋骨框架是不可破坏的,因此,仅对该船强肋骨框架之间的跨距为2 800 mm的一片船体结构进行建模。
Marc程序提供了多点约束的功能,能有效地模拟结构边界条件[9]。本文采用多点约束,通过控制位移增量,即控制模型端面的转角增量来方便地求解极限弯矩。边界条件的处理如下,Z=0的端面:端面上所有节点Uz=0,甲板和船底上节点Uy=0,侧板上Ux=0;Z=2 800端面:运用多点约束,假定端面近似刚性面绕其中性轴转动,逐步弯矩载荷;船中采用对称边界条件:Ux=0,Rz=0,Ry=0。具体载荷定义如下:给主节点施加一总纵弯矩,大小为5×1 012 N·mm,并赋予该弯矩一随分析时间变化的曲线,为了将来参看结果的方便,将曲线定义成1:1关系的直线。
在进行极限强度分析时,由于失稳前后系统的非线性很强,因此选择步长要注意使得步长足够小,过大的步长无法抓住后屈曲时的变形变化。不过同时也要注意不能过分追求小步长,因为步长小至一定程度时影响已经很小,但它带来的机时损耗却很大。在实际LNG船的极限强度分析时,考虑计算效率,多次调整步长进行试算,最后选定加载步长为0.01。
该LNG船极限强度计算的空间有限元模型如图1所示。

图1 LNG船有限元模型
基于上述SUS法计算原理,在Windows平台上使用Compaq Visual Fortran 6.5开发了总纵弯矩计算程序(SUS)。该程序在输入单元几何特性时分两组数据输入。所有具有相同截面特性作为相同的单元类型,而每一个单元数组中有相应的单元类型编号。本文将LNG船的全船舯截面划分为396个单元,65种单元类型导入SUS程序进行计算。
采用SUS法计算时考虑了筋和板的残余应力,但没有考虑由于外载引起的侧压力、初挠度以及腐蚀等引起的影响。运用MSC/Marc程序计算时,为了避免建模的复杂性,模型中忽略了初始扰度和焊接残余应力。
4 计算结果及比较
1) Marc程序计算结果
运用MSC/Marc程序计算所得的弯矩—变形(转角)曲线分别见图2、图3,可以看出计算的中拱极限弯矩值为16.757×109N·m,中垂的极限弯矩值为12.94×109N·m。
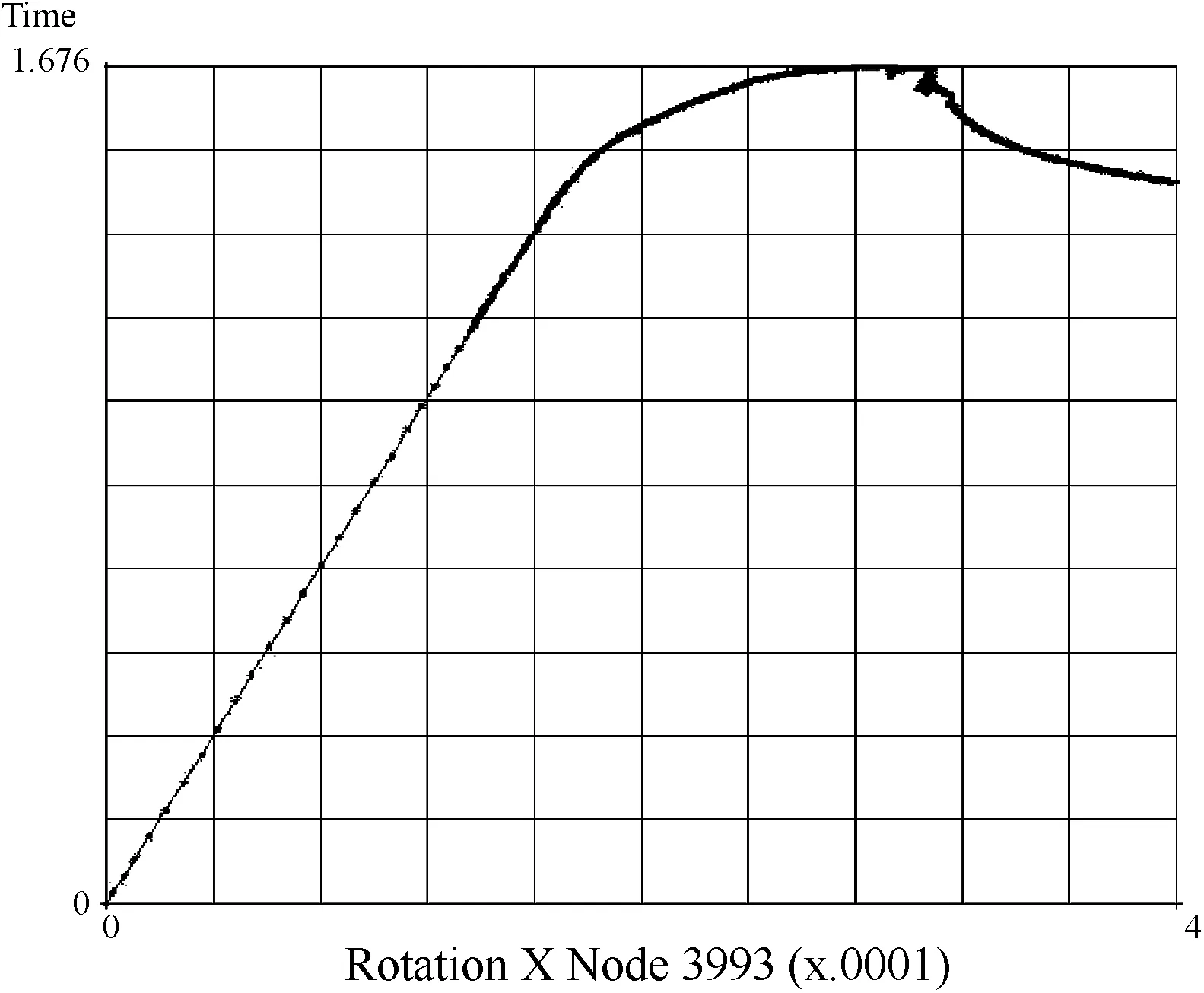
图2 弯矩—变形(转角)曲线(中拱)

图3 弯矩—变形(转角)曲线(中垂)
2) SUS程序计算结果
运用SUS程序进行计算得出如下结果,图4是计算的弯矩—曲率图,表2是各种弯矩值。表中Mp为全塑性弯矩,MUH为中拱时的极限弯矩,MUS为中垂时的极限弯矩,MYH为中拱时的初始屈曲弯矩,MYS为中垂时的初始屈曲弯矩。

图4 弯矩—曲率关系
表2弯矩计算值(单位:×109N·m)

MpMUHMUSMYHMYS18.06915.45812.70912.13812.628
从MSC/Marc程序与SUS程序计算结果比较来看,中拱的极限弯矩值相差8.4%,MSC/Marc程序计算值较大;中垂的极限弯矩值相差1.8%,MSC/Marc程序计算值较大。
5 结 论
本文探讨了运用MSC/Marc程序计算LNG船的船体极限强度的思路及方法,为今后类似船型的极限强度分析提供参考。从计算结果来看,利用MSC/Marc程序对LNG船进行船体极限强度分析的结果与简化方法(SUS)的结果比较接近,这证明两种计算方法的结果是可信的。Marc计算结果偏大的原因主要是计算中未考虑板和筋的残余应力,残余应力对船体极限强度的影响在结构设计中必须得到重视。
参考文献:
[1] 宋玉春.全球LNG船运市场转向[J]. 中国石油和化工,2007(13):45-48.
[2] 冯德阶.我国液化气水上运输的现状与发展趋势[J].广州航海高等专科学校学报,2002(1):13-15.
[3] 徐向东,崔维成,冷建兴,等.箱型梁极限承载能力试验与理论研究[J].船舶力学,2000,4(5):36-43.
[4] Tetsuya Yao. Hull girder strength [J]. Marine Structures,2003,16(1):1-13.
[5] 王勖成.有限单元法[M].北京:清华大学出版社,2004.
[6] BATHE K J,DVORKIN E N. Automatic solution of nonlinear finite element equations [J]. J Comput & Struct, 1983, 17(5-6): 871-879.
[7] 许明财.逐步破坏法计算船体梁总纵极限强度[D].武汉理工大学硕士论文,2003.
[8] 何福志, 万正权. 船体结构总纵极限强度的简化逐步破坏分析[J]. 船舶力学,2001,5(5):21-35.
[9] 陈火红. MARC有限元实例分析教程[M].北京:机械工业出版社,2002.
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
成都信息工程大学学报(2021年5期)2021-12-30
当代水产(2021年8期)2021-11-04
西安邮电大学学报(2021年1期)2021-04-19
舰船科学技术(2021年12期)2021-03-29
中学生数理化·中考版(2019年9期)2019-11-25
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2016年12期)2016-02-27
