PID智能模糊自整定控制器在SG水位控制中的应用
2007-09-20 05:49:22鲁建梁张广福
船海工程 2007年4期
鲁建梁,张广福
(海军工程大学 船舶与动力学院,武汉430033)
蒸汽发生器(SG)的“假水位”现象使SG的水位控制变得复杂,常规PID控制难以取得满意的控制效果。而模糊控制可以将人的经验、智慧总结提炼成模糊规则,模仿人的控制经验而不依赖对象的模型进行直接推理[1],因此,它的控制效果优于常规PID。以SG水位为控制对象设计SG水位模糊自适应PID控制器。结果表明,系统具有稳态精度高,响应快,超调小等特点。
1 传统蒸汽发生器PID控制
在蒸汽发生器水位控制中,早期采用三冲量单PID控制方法。三个冲量分别是水位反馈信号、给水流量反馈信号和蒸汽流量前馈信号。三冲量信号经相应的比例变换后,其差值e=K(ZQ-GS)-H+H0(ZQ为蒸汽流量,GS为给水流量,H0为水位给定值,H 为水位测量值)作用到PI调节器而输出一个给水流量的控制信号,从而改变给水调节阀开度,使给水流量发生变化,以达到控制水位的目的,控制结构见图1。

图1 蒸汽发生器三冲量水位控制系统框图
另一种方法是双PID串级控制,见图2。

图2 蒸汽发生器水位串级控制系统框图
其原理是:内环采用一个流量PID控制器,外环采用一个水位PID控制器。在变负荷时,不考虑水位信号的作用,而通过流量PID环节使蒸汽流量与给水流量快速达到基本平衡,使系统基本稳定,从而避开“假水位”对系统控制的影响。当“假水位”过程结束,系统基本稳定后,水位信号再重新参与控制,由水位PID调节器进行调节。
但是,由于在对蒸汽发生器水位进行实际控制的过程中存在惯性、非线性以及测量误差等问题,且不同工况下水位特性参数变化范围广,因此PID的参数很难整定,难以满足全工况的要求,且难以同时兼顾良好的动态特性和良好的静态特性。
2 PID智能模糊自整定控制
2.1 模糊PID控制器的设计思想
常规数字增量式PID控制器形式如下[2]:

式中:Kp,Ti,Td——比例、积分、微分作用参数;
T——采样时间。
针对不同对象和工况,Kp,Ti,Td的参数需要及时调整,文中参数的调整由模糊推理器来自动完成。为了满足PID控制器中Kp,Ti,Td参数能随对象和工况自动调整,使控制达到满意的效果,设计了一个模糊推理器,根据偏差E和偏差变化率Ec实时调整Kp,Ti,Td这3个参数。
2.2 模糊自适应PID控制器结构
模糊自适应PID控制系统主要由参数可调整PID控制器和模糊推理系统两部分组成。模糊自适应PID控制器是在常规PID控制器的基础上以误差E和误差变化率Ec作为输入,采用模糊推理方法实现参数Kp,Ti,Td调整,以满足不同时刻偏差E和偏差变化率Ec对PID参数自调整的要求。利用模糊控制规则对PID参数进行自动调整便构成了模糊自适应PID系统[1],结构见图3。
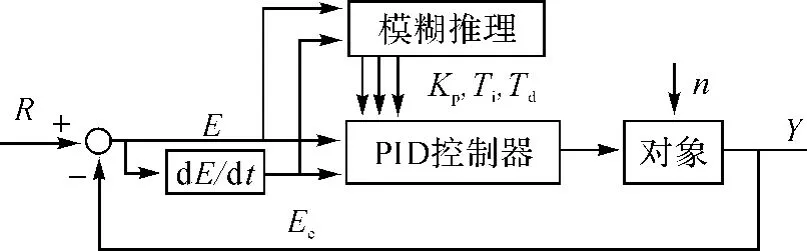
图3 模糊自适应PID控制系统结构
2.3 PID参数模糊自调整规则表
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。根据对已有控制系统设计经验的总结,可以得出PID参数Kp,Ti,Td的自整定规则见表1~3。

表1 Kp的模糊规则表

表2 Ti的模糊规则表

表3 Td的模糊规则表
2.4 Kp,Ti,Td 的自适应校正
将误差E和误差变化率Ec变化范围定义为模糊集上的论域。E,Ec={-5,-4,-3,-2,-1,0,1,2,3,4,5}。其模糊子集为E,Ec={NB,NM,NS,O,PS,PM,PB},子集中元素分别代表负大、负中、负小、零、正小、正中、正大。设E,Ec和Kp,Ti,Td均服从正态分布,可得各模糊子集的隶属度,见图4。

图4 E,EC,Kp,Ti,Td 的隶属函数
根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:

在线运算过程中,控制系统通过对模糊控制规则的结果处理、查表和运算,完成对PID参数的在线自校正。工作流程见图5。

图5 在线自校正工作流程图
2.5 模糊自整定PID控制及仿真
蒸汽发生器水位模糊自整定PID控制系统的具体结构见图6。

图6 模糊自整定PID控制
模糊自整定PID控制和传统PID控制进行比较。在仿真实验中,蒸汽发生器水位的给定值不变(0mm),而负荷按照典型工况变化(蒸汽发生器负荷从100%降到30% ;稳定后,再按每分钟10%的负荷快速升到100%)。图7为仿真实验结果,其中实线为传统PID控制的响应曲线,虚线为模糊自整定PID控制的响应曲线。由仿真实验结果可以看出,模糊自适应PID控制方案具有响应快,超调量小,振荡少等优良特性[2]。

图7 蒸汽发生器水位响应曲线
3 结束语
实验结果表明,模糊自适应PID控制能够实时调整Kp,Ti,Td3个参数,因此系统超调量小,调节时间短,振荡少,使系统调节更为精细。与传统PID控制相比,模糊自适应PID控制器各项性能指标明显优于传统PID控制器,在蒸汽发生器水位控制中取得了满意的效果。
[1]庄利锋,杨慧中.模糊控制器在高阶水位控制中的设计及应用[J].东 南 大 学 学 报,2004,34:166~168.
[2]王正林,郭阳宽.过程控制与Simulink应用[M].北京:电子工业出版社,2006.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:58
青海电力(2022年1期)2022-03-18 12:08:36
应用化工(2021年12期)2021-02-21 07:24:12
航空发动机(2020年1期)2020-06-13 06:18:38
中国核电(2017年1期)2017-05-17 06:10:04
小猕猴智力画刊(2017年4期)2017-05-04 04:12:36
军事文摘·科学少年(2017年1期)2017-04-26 21:33:18
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57