
蒸汽发生器水位神经自校正控制研究
2007-09-20 05:49陈杰
船海工程 2007年4期
陈 杰
(中国人民解放军海军医学研究所,上海200433)
核动力蒸汽发生器是压水堆核动力装置中的主要设备之一,也是把一回路冷却剂从反应堆堆芯带出的热量传给二回路水的关键性设备。在运行过程中,运行水位必须控制在一定的范围内。
现在大多数蒸汽发生器水位控制是采用传统PID控制方案的模拟控制系统[1]。传统的PID控制方法在蒸汽发生器水位控制过程中存在着一些缺点[2]。蒸汽发生器是一个高度复杂的非线性时变的非最小相位系统,具有很大的纯滞后,其稳定裕度较小。要在变工况运行情况下仍获得良好的控制效果,往往需要改变PID控制器的参数。由于模拟PID控制器的参数难以实现在线调节,其增益也不能调得过高,否则会引起控制系统闭环不稳定,因此难以满足核动力装置在各种功率情况下的自动控制要求。而将PID控制与神经元结合起来,充分利用神经网络的非线性逼近特性及自学习、自组织的能力,在线调节PID的三个系数,往往能够有效地克服纯滞后和模型时变的影响[3]。因此,设计了蒸汽发生器单神经元PID控制器。
1 单神经元控制器的设计
单神经元自校正PID控制器模型如图1所示[4]。
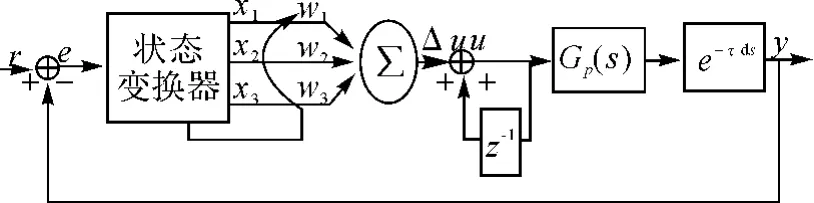
图1 神经元PID控制器
图1 中,r为期望输出,y为实际输出,e为系统误差信号,wi(k)为k时刻的权重,i=1,2,3,分别代表PID控制三个参数Kp,Ki,Kd。X为神经元的状态量。
这里取3个状态分别是

控制器的输出可表示为:
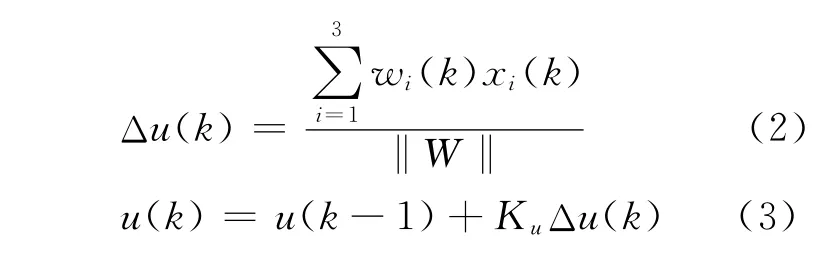
式(2)中权重向量W 和状态向量X 内积后除以权重向量的欧几里德范数‖W‖,目的是保证控制策略的收敛性,可显著减少震荡,增强控制过程过渡的平稳性。
权值的学习采用联想式学习策略,该学习策略将Hebbian与有监督学习相结合,在导师信号的作用下对权值进行在线调整。将输入状态X加到神经元的输入端,同时将相应的期望输出与实际输出相比较得到误差信号,以此调整连接权值,随着环境(包括期望输出、模型参数漂移、干扰)不断地提供输入状态,W 不断改变。如果环境发生变化,W 也随之改变。这种调节过程可描述为:

式中:ηi——学习速率。
比例因子Ku的选择很重要,Ku值取得大,系统响应速度快,但超调量大,甚至可能产生震荡;Ku值取得小,系统响应速度慢,Ku值取得太小,有可能产生稳态误差。
2 三冲量控制器的设计
压水堆使用的蒸汽发生器,其数学模型的传递函数形式为:

式中:y——蒸汽发生器水位;
QW——给水流量;
Qs——蒸汽流量;
G1(s)——给水流量对蒸汽发生器水位的影响;
G2(s)——蒸汽流量(负荷)对蒸汽发生器水位的影响。
考虑汽轮机输出功率的随机性,蒸汽流量QS(s)也是随机的,故应将d= G2(s)QS(s)看作输出干扰,而只对y(s)=G1(s)QW(s)部分进行PID参数设计。
为克服蒸汽发生器特有的“虚假水位”现象,并有助于消除水位静态误差,必须采用三冲量水位控制系统。所谓三冲量是指控制系统具有三个输入量作为控制变量,即汽包水位、蒸汽流量(负荷)和给水流量。在该系统中,汽包水位为被控变量,是主调节信号,蒸汽流量和给水流量是两个辅助调节信号,其实质为前馈加反馈控制系统。蒸汽流量前馈信号的引入可克服“虚假水位”现象,给水流量反馈信号的引入则会克服给水侧的波动[5]。
因为蒸汽发生器是一类存在较大纯滞后特性和模型不确定性的对象,传统的PID三冲量控制器的控制性能不是很优。
结合神经元的自学习、自组织的特性,设计出蒸汽发生器单神经元自校正PID三冲量控制系统见图2。

图2 蒸汽发生器单神经元自校正PID控制系统
图2 中,K1、K2分别表示给水流量和蒸汽流量的分压系数。为保证给水流量能匹配蒸汽流量,K1和 K2取值应相等[6]。
3 仿真实例
某压水堆蒸汽发生器模型G1(s)、G2(s)的具体表达式为[7]:
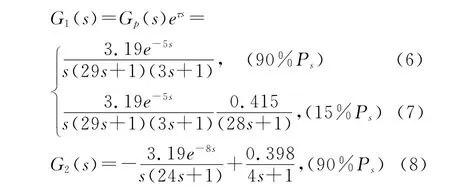
式中:Ps——额定负荷。
负荷在(15%~90%)Ps时用(6)式及(8)描述;小于15%Ps时用(7)式及(8)描述。
本例仿真中,控制系统的K1,K2同取为0.5,Ku取值1,PID系数初始值为采用比例临界整定法设计出的Kp=32.730 8,Ki=0.924 1,Kd=335.922 8。仿真中限制控制量u(即给水流量)在0到额定流量258kg/s之间。仿真采用Matlab语言实现。
考虑期望水位在第50s时由初始的0阶跃到2m并保持在2m,接着在第1 000s时蒸汽流量由100kg/s阶跃为150kg/s,当采用神经元自校正PID控制时,Kp、Ki、Kd的在线自调整过程见图3,给水流量对蒸汽流量的跟踪过程见图4,采用神经元自校正的PID控制与不加神经元的传统PID控制的性能比较示于图5。

图3 Kp、Ki、Kd 的在线调整过程
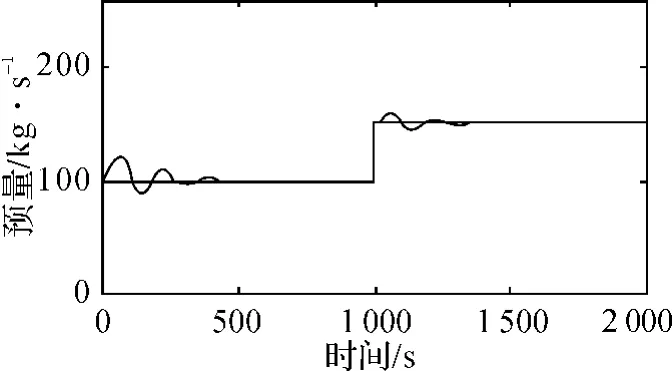
图4 给水流量对蒸汽流量的跟踪

图5 期望水位、蒸汽流量阶跃响应图
可见,与不加神经元的传统PID控制相比,神经元自校正的PID控制器超调量、上升时间、调节时间均显著减少。
4 结论
本文针对蒸汽发生器系统具有大滞后,模型不确定的特点设计单神经元自校正控制系统。该设计方法简单方便,对蒸汽发生器系统进行了控制,取得了满意的控制效果。该方法也可用于其他大纯滞后和模型时变的过程控制,具有广泛的应用前景。
[1]周 刚,张大发,殷 虎.NSG水位神经自适应PID控制与仿真研究[J].计算机仿真,2004,21(3):1~3.
[2]Man Gyun Na.Design of steam generator water level controller via the estimation of the flow errors[J].Ann.Nucl.Energy,1995,22(6):367~376.
[3]Takashi Iijima,Yoshiaki Nakajima,Yasushi Nishiwaki.Application of fuzzy logic control system for reactor feed-water control[J].Fuzzy sets and systems,1995,74:61~72.
[4]刘金锟.先进PID控制及其 MATLAB仿真[M].北京:电子工业出版社,2003.
[5]邱志强,孙建华.船用蒸汽发生器水位模糊控制器研究[J].舰船科学技术,1998(6):29~35.
[6]徐义亨.复合量控制系统的工程设计[J].石油化工自动化,1999(1):11~35.
[7]Zhao Fu-tao,Ou Jing,Du Wei.Simulation Modeling of Nuclear Steam Generator Water Level Process-a Case Study[J].ISA Transactions,2000,39:143~151.
猜你喜欢
江苏广播电视报·新教育(2022年1期)2022-05-15
当代水产(2022年3期)2022-04-26
青海电力(2022年1期)2022-03-18
汽车实用技术(2020年21期)2020-12-09
国学(2020年1期)2020-06-29
航空发动机(2020年1期)2020-06-13
家庭影院技术(2018年11期)2019-01-21
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
空间控制技术与应用(2010年5期)2010-12-23
