
基于AIS信息的船舶自动避碰模型及其算法与仿真
2007-06-01 12:30:30王当利黄立文
船海工程 2007年2期
王当利 黄立文
武汉理工大学航运学院 武汉430063
基于AIS信息的船舶自动避碰模型及其算法与仿真
王当利 黄立文
武汉理工大学航运学院 武汉430063
针对全自动无人驾驶船舶研制的核心之一,需要一个成熟而实用且与现有航行方法、规则和规章相一致的智能避碰专家知识库,提出可用于构建这种知识库的船舶自动避碰模型,并给出相关的计算机流程图,对该模型进行编程仿真的结果表明该模型具有可行性和有效性。
智能 避碰 知识库 国际海上避碰规则
现代电子设备、计算机技术、卫星和通讯设施能使船舶控制人员更清楚地掌握船舶的相关情况,但是关于无人驾驶船舶的研究却进展缓慢。原因是多方面的,其中一个重要原因就是缺乏一个能为航海人员、专家和学者所接受的自动航行和自动避碰程序[1]。船舶自动避让技术是实现从现阶段的单人驾驶台到下一阶段的单人船舶,直至最终实现无人驾驶船舶各个环节中的关键技术[2]。
1 船舶自动避碰模型概述
1.1 应用条件
船舶自动避碰模型工作原理见图1。
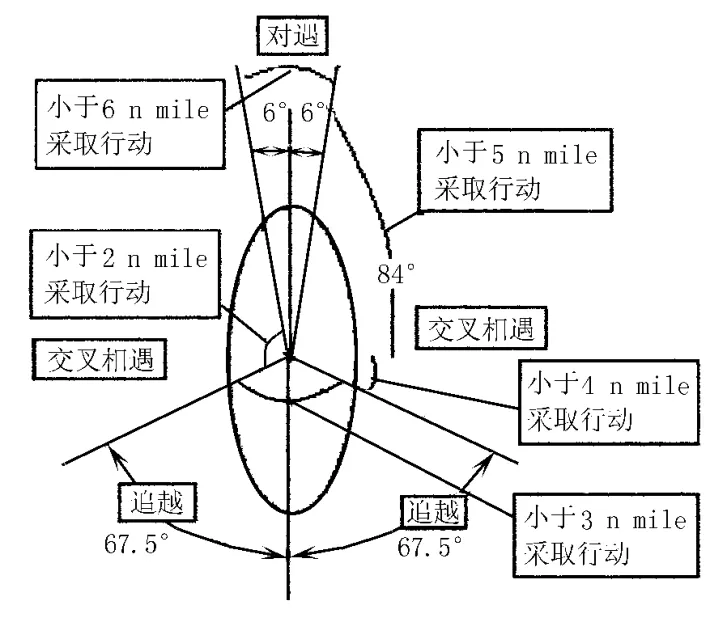
图1 船舶自动避碰模型
应用条件为在开阔洋面上,船长在50 m及50 m以上的具有AIS的机动船[3]。
1.2 具体含义
“1972年国际海上避碰规则”(以下简称“规则”)根据能见度的不同,将两船相遇分为能见度良好下(互见中)两船相遇和能见度不良两船相遇两种情况,在前一种情况下存在对遇,交叉相遇和追越三种局面,在后两种局面下,两船又有让路船和直行船(义务船和权利船)之分[4]。根据“规则”精神,在存在碰撞危险的情况下,采取避让行动的时机随能见度和会遇局面的不同而各异,船舶采取的行动应使双方通过时的最近会遇距离(DCPA)大于等于安全会遇距离(Safe DCPA),Safe DCPA根据两船船长、当时天气情况等而定[3]。
2 各避碰指标的计算流程图
来船位置、SOG、COG都可从AIS接收机中读取,本船位置、COG、SOG等可从GPS接收机中获得。GPS船位存在一定跳跃性,须经卡尔曼滤波处理。当然,理论上可以证明,只需两个时刻的船位即可求出SOG和COG,具体证法从略。需要计算的参数为DCPA、距最近会遇点的时间TCPA、来船与本船的航向差、来船距离,输出量为本船航向和航速,见图2。
3 对遇局面和交叉相遇局面下的仿真及其结果分析
3.1 对遇局面下的仿真及其结果分析
对遇局面下的自动避碰示意图见参考文献[3],其各指标的变化曲线见图3。图3中横轴为开始仿真的时间,纵轴为两船间距。
假设当时天气条件符合气象条件等级3(等级划分见参考文献[3])的情况,本船参数:COG 314°,SOG 20 kn,200 m长;来船参数:COG 134°,SOG 15 kn,150 m长。两船所用舵角大小和转舵速率采用了同类型船的数据,读取来船数据间隔为2 s。根据参考文献[3]得知,Safe DCPA为2 037.2 m(1.1 n mile)。从图3中可以看出,随着时间的流逝,两船间距和TCPA逐渐减小,DCPA和本船偏航距离均为0;当间距小于等于11 112 m(6 n mile)时(约451 s),各自向右转向,DCPA和本船偏航距离都逐渐增大,约1 179 s时DCPA达到最小值(2 042.3 m),本船偏航达到最大值(2 042.3 m),TCPA为0;随后两船各自向左转向,两船间距和DCPA逐渐增大,且等值,TCPA始终为0,本船偏航距离逐渐减小,直至两船回到计划航线,偏航为0,仿真结束。
不难看出,两船采取的行动符合国际避碰规则对于在互见中和能见度不良时两船采取行动的要求,仿真的DCPA最小值为2 042.3 m,与设定的2 037.2 m相差5.1 m,误差主要是由于仿真程序在读取数据和计算时需花费一定时间而产生。误差率为2.5‰,对于万吨级船而言,是完全可以接受的,且实际的DCPA最小值大于Safe DCPA,偏于安全。值得一提的是,另一种仿真结果显示,即使本船一方采取避让行动,两船也可安全通过,只不过所采取的避让舵角比双方行动时要大一些,为节约篇幅,不再展开了。
3.2 交叉相遇局面下的仿真及其结果分析
交叉相遇下的自动避碰示意图见参考文献[3],其各指标的变化曲线见图4。
除来船参数的COG为201°,SOG为15.0 kn外,其它参数与对遇局面的相同。Safe DCPA仍为2 037.2 m(1.1 n mile)。
从图4中可以看出,随着时间的流逝,两船间距和TCPA逐渐减小,DCPA和本船偏航距离均为0;当间距小于等于9 260 m(5 n mile)时,本船向右转向,DCPA和本船偏航距离都逐渐增大,约764 s时DCPA达到最小值(2 061.5 m),TCPA为0,约15 s后本船偏航达到最大值(2 102.0 m);然后本船逐渐向左转向,两船间距和DCPA逐渐增大,且等值,TCPA始终为0,本船偏航距离逐渐减小,直至回到计划航线,偏航为0,仿真结束。
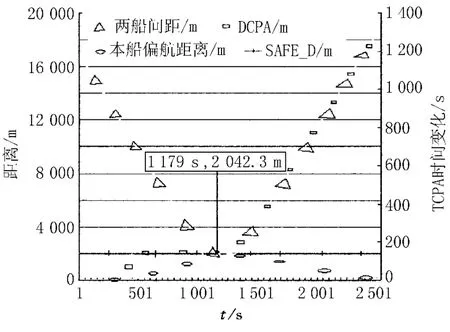
图3 仿真对遇局面下各指标的变化曲线

图4 仿真交叉相遇局面下各指标的变化曲线
同样可知,本船采取的行动符合国际避碰规则对于在互见中和能见度不良时“义务船”采取行动的要求,仿真的DCPA最小值为2 061.5 m,与设定的2 037.2 m相差14.3 m,原因与对遇中的相同。误差率为7‰,对于万吨级船而言,也是完全可以接受的,且实际的DCPA最小值大于Safe DCPA,偏于安全。本船偏航距离最大值在最小DCPA之后出现,且比Safe DCPA大,这与实际情况相符,说明了仿真的合理性。
同理,可以仿真“船舶自动避碰模型”中的追越局面,来船虽为“义务船”,但不采取避让行动时的会遇局面,以及来船在本船右正横后的交叉相遇局面,其结论都与上述两种局面相似[4]。
4 结论
文中所提出的“船舶自动避碰模型”具有人工智能和专家系统的功能,从其计算机编程的仿真结果来看,典型会遇局面的避让效果令人满意,体现了“规则”、海员通常做法和良好船艺的精神,具有较高的实用价值,在以后的研究中将进一步探讨该模型在大型船舶操纵模拟器上应用的可行性。与人工避让相比,在确保安全的前提下,计算机控制船舶自动避让更精确,效率更高,可以大大降低船舶驾驶员劳动强度,减少人为误差,既省时间,又省燃料,具有广阔的应用前景。
参考文献
[1]Jun Kayano,Junji Fukuto,Hayama Imazu,Kazuyuki Igarashi.On a collision avoidance support system for one person bridge operation[C].Proceedings of the 3rd International Conference on Collision and Grounding of Ships,2004:81-86.
[2]王当利.无人驾驶船舶的发展途径[J].中国水运,2004(4):139-140.
[3]王当利.基于GPS,ARPA和陀螺罗经信息开发船舶自动避碰模型及其仿真[J].武汉理工大学学报:交通科学与工程版,2006(1):136-139.
[4]蔡存强.国际海上避碰规则释义[M].北京:人民交通出版社,1995:169-199.
The model of auto-preventing collision for ship based on AIS information and its simulation
WANG Dang-li HUANG Li-wen
School of Navigation Wuhan University of Technology Wuhan 430063
As a core technique in development of the full-automatic unmanned ship,an intelligent knowledge base is necessary which is compatible with the common navigation manners,as well as the current rules and regulations.This paper proposes a model of auto-preventing collision for ships that can be used to build up this kind of knowledge base,and puts forward a program flow chart for simulation.The simulating result proves the feasibility and effectiveness of the model.
intelligence preventing collision knowledge base COLREG
U675.79
A
1671-7953(2007)02-0129-04
2006-08-31
修回日期2006-10-28
王当利(1962—),男,硕士,副教授。
猜你喜欢
集美大学学报(自然科学版)(2022年4期)2022-09-04 03:13:02
华人时刊(2022年7期)2022-06-05 07:33:56
舰船科学技术(2021年5期)2021-07-03 07:20:48
中国航海(2021年1期)2021-03-10 13:31:32
武汉理工大学学报(交通科学与工程版)(2020年3期)2020-07-27 06:46:00
上海海事大学学报(2018年1期)2018-04-30 05:15:32
中国航海(2015年3期)2015-11-29 01:02:53
学习月刊(2015年12期)2015-07-09 03:36:52
重庆交通大学学报(自然科学版)(2015年4期)2015-06-07 11:22:58
中国航海(2014年3期)2014-11-28 11:17:08
