
基于UR16e 机械臂的运动轨迹规划与仿真
2025-03-05 00:00:00曹海燕徐华珍梅香香江小静胡兆鹏吴芳
电脑知识与技术 2025年2期
关键词:机械臂



摘要:为提高UR16e机械臂运动轨迹的平滑度和稳定性,探讨七次多项式插值法的应用效果。基于UR16e的基本参数,在机械臂多个关节处建立局部坐标系,构建改进型Denavit-Hartenberg参数的机械臂运动学模型,并对机械臂的正运动和逆运动进行仿真分析。七次多项式插值法不仅能够控制初始和终止位置、速度及加速度,还能控制加加速度,从而使轨迹在这些条件下更加平滑和稳定。因此,文章采用五次多项式插值法和七次多项式插值法分别对UR16e机械臂各关节的运动轨迹进行MATLAB仿真分析。通过对比发现,与五次多项式插值算法相比,七次多项式插值算法能够显著提高机械臂运行轨迹的平滑度和稳定性,更适用于需要精细控制速度和加速度变化的高精度任务。
关键词:机械臂;MATLAB;五次多项式插值法;七次多项式插值法;UR16e
中图分类号:TP181 文献标识码:A
文章编号:1009-3044(2025)02-0081-04 开放科学(资源服务) 标识码(OSID) :
0 引言
机械臂作为一种模拟人类手臂的机械装置,能够实现对物体的抓取和搬运功能,大幅提高工业生产效率、降低操作工人劳动强度和危险性,因此在制造业领域得到了广泛应用。正确分析运动学特性是实现机械臂精确控制的关键。当前,关于运动学的分析和路径规划的研究已取得重要进展,其中包括多种控制方法和算法的优化,并通过仿真分析和实验验证等方法对机械臂运动控制与轨迹规划的性能进行评估和验证。
早期的机械臂运动轨迹研究多采用三次多项式插值法,近年来,五次多项式插值法、七次多项式插值法以及更高阶多项式插值法成为研究热点。2017年,罗天洪和马力设计了一种可以在隧道空间灵活运动的18关节六足仿蜘蛛机器人,并运用D-H建模方法对仿蜘蛛机器人进行运动学建模。基于推导的逆运动学方程式,他们采用蒙特卡洛法和过路径点的三次多项式插值算法分别对末端可达空间和避障轨迹进行了路径规划和仿真分析[1]。2018年,王君等人根据D-H参数建立了UR5机器人三维数学模型,对UR5机器人进行了正运动学和逆运动学分析,并通过MATLAB仿真验证了机器人运动学三次多项式插值法模型的准确性[2]。2022年,任军等人以ER5六自由度机械臂为研究对象,建立了ER5的D-H参数机械臂模型,并通过MATLAB仿真验证了运动学分析的正确性[3]。同年,Fang等人首先建立了机器人的运动学模型,通过MATLAB仿真研究了七自由度机器人的轨迹规划,研究发现七次多项式插值法比三次多项式插值法得到的运动加速度更具连续性,从而能够提高各个关节的轨迹平滑性[4]。2024年,周扬等人通过建立DH参数仿真研究了六关节机器人运动特性,从而验证了相关理论的正确性[5]。2024年,Liao以PUMA560机器人为研究对象,通过改进的D-H参数建立了每个关节的局部坐标系,采用五次多项式插值算法获得了机器人关节角度、角速度和角加速度随时间变化的特性曲线,有效验证了D-H参数设计的合理性,并证明五次多项式插值法能够使轨迹更加平滑[6]。
综上所述,国内外现有研究主要集中于三次多项式插值法、五次多项式插值法或七次多项式插值法的轨迹规划研究,但关于五次多项式插值法与七次多项式插值法差异性的比较研究较为鲜见。因此,本研究分别采用五次多项式插值法和七次多项式插值法对机械臂各关节进行轨迹规划,利用MATLAB提供的机器人工具箱对机械臂进行建模以及轨迹规划仿真。本研究对后续相关研究具有重要的理论意义,并为相关研究提供参考价值。
1 UR16e 结构参数
Denavit-Hartenberg模型(D-H模型) 是机器人运动学中用于描述机器人运动学的一种参数化方法。该方法通过设置四个参数来描述机器人或机械臂的连杆之间的相对位置和姿态,即连杆长度、连杆转角、关节偏距和关节角。D-H模型主要应用于机器人运动学分析,通过这些参数可以计算出机器人末端执行器相对于机器人基座的位置和姿态。这种方法是一种通用且灵活的建模方法,可适用于简单和复杂的机器人系统[7]。
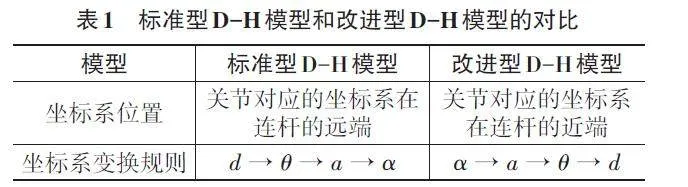
D-H模型包含两种建模方式:标准D-H模型和改进型D-H模型。由于标准D-H建模方式在处理复杂机器人运动学问题时可能会出现误差,容易导致模型中多个轴重叠,并且在处理机器人奇异性问题时容易出现问题,而改进型D-H建模方式避免了这些缺点。改进型D-H模型在计算机数值解中使用更高精度的数值计算,使得计算结果更加准确且接近真实情况,以更好地适应不同的机器人系统和任务需求,具有更好的可扩展性。在实际应用中,可以根据机器人的关节数量和类型来设置参数,从而提高计算效率和精度[8]。
两者的对比见表1,其中:a—连杆的长度,α—连杆的扭角,d—两个相邻连杆的长度,θ—两个连杆之间的夹角。
本文采用改进型D-H模型对UR16e机械臂模型进行分析。改进型D-H模型的坐标系是根据右手定则确定的。首先,Z轴的确定规则是根据关节类型判断:若关节是旋转关节,Z轴按照右手定则,大拇指指向为正方向,关节转角θ为关节变量;若关节是移动关节,Z轴沿直线运动方向的正方向,连杆偏移d为关节变量。
其次,X轴的确定规则如下:当两关节的Z轴既不平行也不相交(即呈异面直线) 时,取两Z轴的公垂线方向作为X轴方向;若两关节的Z轴平行,则两Z轴之间存在无数条公垂线,可选择与前一关节的公垂线共线的一条公垂线作为X轴;若两关节的Z轴相交,则取两条Z轴的叉积方向作为X轴。
最后,Y轴的方向根据右手定则确定即可。
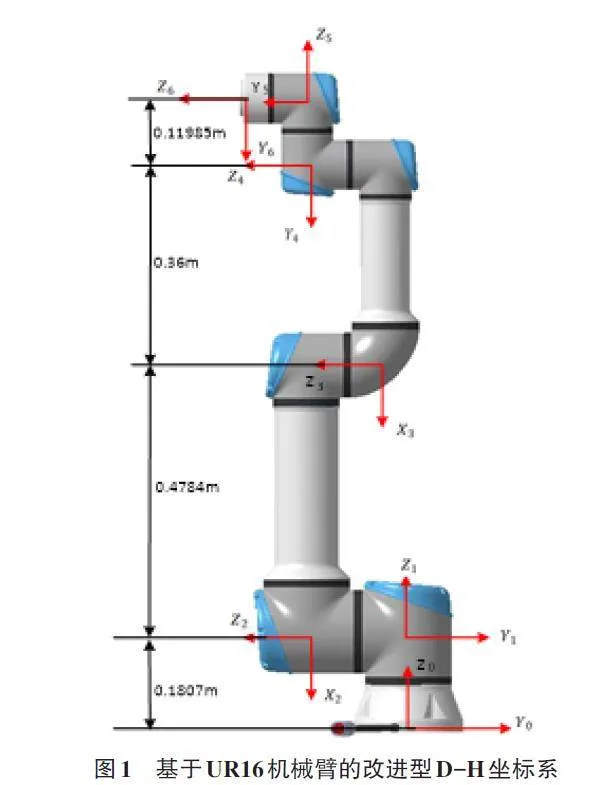
根据上述规则,可以创建UR16e的连杆坐标系,如图1所示。
根据各个关节的坐标系,确定关节与关节之间的坐标系的变化规则。具体操作如下:
(1) 通过坐标系i - 1的Zi - 1轴旋转θi角度;
(1) 通过坐标系i - 1的Zi - 1轴旋转θi角度;
(3) 沿着新的Xi轴平移ai距离;
(4) 围绕Xi轴旋转αi的角度。
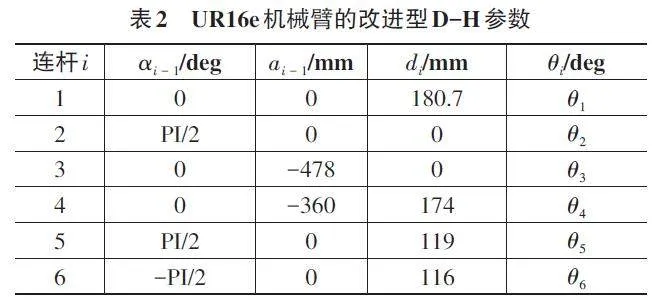
UR16e机械臂改进型D-H参数,如表2所示。
2 运动学分析
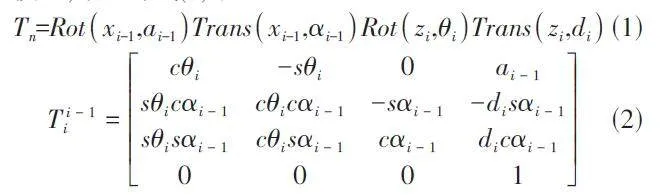
根据上述D-H坐标系变换规则,根据公式(1) 确定D-H参数的坐标变换的关系,从而确定齐次变换矩阵建立运动学方程数据模型(六自由度机械臂的运动模型) ,见公式(2) 。
式中:cθi—cos(θ ) i ;s (θ ) i —sin(θ ) i ;T i - 1 i —相邻两个连杆的齐次变换矩阵。
根据公式(2) 可以确定UR16e机器人末端姿态,即:末端的齐次变换矩阵,如式(3) 所示。
T60 = T10 ⋅ T21 ⋅ T32 ⋅ T43 ⋅ T54 ⋅ T65 (3)
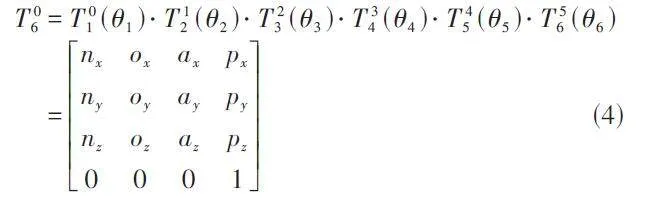
根据上述的齐次变换矩阵可以进行运动学分析,其中运动学分析包含正运动学分析和逆运动学分析。正运动学是已知θ1、θ2、θ3、θ4、θ5 和θ6 关节转角参数,根据公式(2) 分别求出T1、0 T2、1 T3、2 T4、3 T5、4 T65,带入公式(3) 中,求出T60即机械臂末端执行器在空间的位姿矩阵,如公式(4) 所示。
逆运动学分析是正运动学的逆过程,即通过末端执行器在空间的位姿矩阵,求解每个关节的转角。逆运动学分析是一个复杂的过程,因为在根据位姿求解每个关节角时,通常会存在多解的问题。一般情况下,需要结合创建的D-H模型进行具体分析。求解逆运动学的主要方法包括代数解析法和几何解法,本文采用的是代数解析法。
例如,求解某关节角θ1 时,将公式(4) 等号两边分别左乘T10 (θ1 )-1和右乘T65 (θ6 )-1,得到公式(5) 。利用公式(5) 中矩阵的第二行第四列的元素相等关系,可以得到公式(6) 。根据公式(6) ,即可求出关节角θ1 的值,如公式(7) 所示。其他关节角度的求解方法类似,通过逐步代入和矩阵运算即可完成逆运动学的分析。
3 运动学仿真
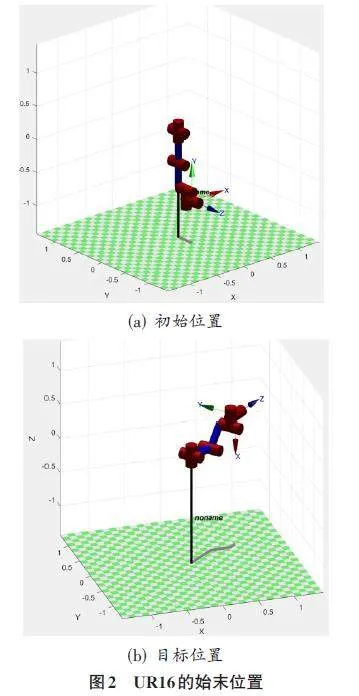
根据表2 的D-H 参数表,使用MATLAB 提供的Robotics Toolbox工具箱相关函数对UR16e机械臂进行建模。初始状态如图2(a) 所示,通过调节关节转角参数,可以使机械臂运动到不同的位置。例如,当机械臂各关节变量设置为 [40°, 80°, 60°, 40°, 90°, 40°] 时,其对应的位置如图2(b) 所示。
4 轨迹规划与仿真
4.1 轨迹规划
在机器人和自动化领域,轨迹规划是一项关键任务,指的是从一个位置平滑、高效地移动到另一个位置。不稳定的运动不仅会加剧关节的磨损,还会引起各个机械臂的振动。多项式插值是一种广泛应用的轨迹规划方法,它可以根据给定的起点和终点条件,生成符合要求的曲线轨迹。多项式插值主要包括三次多项式轨迹规划、五次多项式轨迹规划和七次多项式轨迹规划。其中,三次多项式插值法的方程中包含4个位置参数,虽然求解简单,但由于只能设置轨迹和速度的约束条件,无法设置加速度的约束条件,其加速度曲线不是连续的,这会导致机械臂在运动过程中出现抖动现象。
五次多项式方程中有6个未知数。五次多项式常用于简单任务,因为它能确保通过6个控制点。五次多项式轨迹规划简单且计算成本低,适合要求较少的轨迹规划,特别是仅需确保初始和终止时的速度、加速度满足一定条件的情况,但可能无法满足更复杂的运动需求。由于只控制到加速度,因此在某些情况下,尽管位置和速度变化平滑,但加加速度(也称为跃变) 可能会出现突变。这可能导致系统在执行过程中产生抖动,影响轨迹的稳定性。其中,五次多项式的表达式如公式(8) 所示。
公式(8) 包含5个未知变量,分别是a0、a1、a2、a4 和a5,其中:θ(t) 表示轨迹曲线函数,θ̇(t) 表示速度曲线函数,θ̈(t) 表示加速度曲线函数。假设从起始转角运动到目标转角时,起始速度和终点速度为0,起始加速度和终点加速度为0,因此五次插值法的约束条件如公式(9) 所示。公式(9) 代入公式(8) ,可以求出五次多项式的五个未知数,如公式(10) 所示。随后,可以通过MATLAB 绘制运动轨迹、运动速度和加速度的曲线图。
因此,本研究提出了七次多项式轨迹规划。七次多项式能够在保证初始和终止位置、速度、加速度的同时,还能控制加加速度,使得轨迹在这些条件下更加平滑和稳定。通过增加对加加速度的控制,轨迹的平滑度得到进一步提升,不仅位置和速度平滑,加速度的变化率也更加平滑。这种方法特别适合需要更高平滑度的轨迹规划场景。
因此,七次多项式通常用于需要精细控制速度和加速度变化的高精度任务。例如,在一些要求高动态性能的场景中(如工业机器人和高速轨迹跟踪任务) 尤为重要。
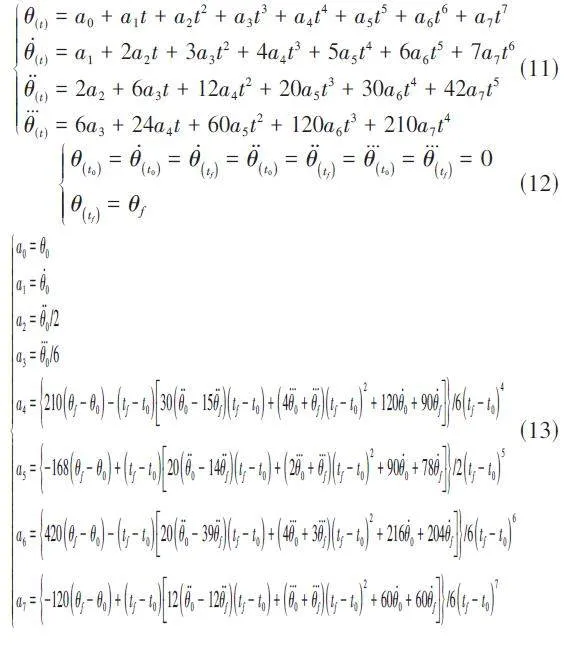
七次多项式的方程如公式(11) 所示。公式(11) 包含8个未知数,分别是a0、a1、a2、a3、a4、a5、a6 和a7,其中,θ(t) 表示轨迹曲线函数,θ̇(t) 表示速度曲线函数,θ̈(t)表示加速度曲线函数。假设从起始转角运动到目标转角时,起始速度和终点速度为0,起始加速度和终点加速度为0,因此七次插值法的约束条件如公式(12) 所示。将公式(12) 代入式(11) ,可以求出8个未知变量,如公式(13) 所示。随后,可以通过MATLAB仿真出机械臂每个关节的运动轨迹、运动速度和加速度的曲线。
4.2 仿真分析
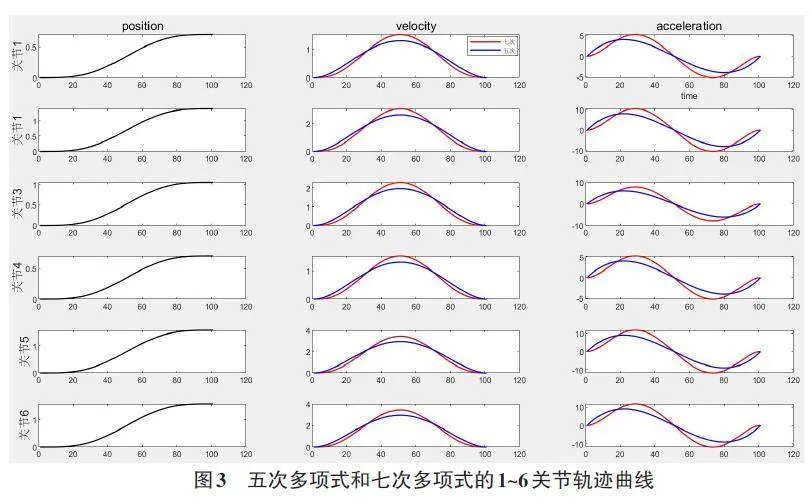
本文使用MATLAB提供的Robotics Toolbox工具箱对UR16e进行建模及轨迹规划仿真。采用机械臂的初始状态作为起点,即各个关节的起始转角为[0°,0°, 0°, 0°, 0°, 0°],各个关节的目标转角为[40°, 80°,60°, 40°, 90°, 40°]。分别采用五次多项式插值法和七次多项式插值法实现机械臂从起点到终点的轨迹规划。图3展示了基于五次多项式插值法和七次多项式插值法得到的每个关节的位置、速度和加速度的曲线图。
由于UR16e具有六个关节,图3中每一行分别表示每个关节运行的位置、速度和加速度曲线。由于每个关节都是从起始转角运行到目标转角,因此无论是基于五次多项式插值法还是七次多项式插值法,位置曲线(图中标注为:position) 都是相同的。其中,红色曲线表示七次多项式插值法的速度(图中标注为:ve⁃locity) 和加速度(图中标注为:acceleration) 的MATLAB 仿真结果,蓝色曲线表示五次多项式插值法的速度和加速度的MATLAB仿真结果。
从图3的分析可知,基于同一段轨迹,五次多项式插值法由于仅控制位置、速度和加速度,其速度曲线在起点和终点的变化相对陡峭,可能会出现加速度的跃变,导致系统的速度变化不够平滑。而七次多项式插值法通过额外控制加加速度,使得速度曲线更加平滑,尤其是在起点和终点处。七次多项式插值法的曲线不仅在位置和速度上平滑,在加速度和加加速度的变化上也更加平顺。
5 结论
本文建立了UR16e的连杆坐标系以及改进型DH参数表,使用MATLAB提供的Robotics Toolbox工具箱对UR16e进行了建模,并对其六个关节的轨迹进行了研究。分别利用五次多项式插值法和七次多项式插值法对轨迹进行规划,通过MATLAB仿真得到了每个关节的运动曲线、速度曲线和加速度曲线。通过仿真结果可知,七次多项式插值法得到的速度曲线和加速度曲线在开始运动和结束运动时比五次多项式插值法更加平滑。本文的研究为后续轨迹规划的研究提供了参考价值,但由于本文仅进行了理论研究,后续可以将此理论研究成果应用于实际场景进行验证。
参考文献:
[1] 罗天洪,马力.基于过路径点的三次多项式插值函数的仿蜘蛛机器人足路径规划[J].机械传动,2017,41(7):1-6.
[2] 王君,陈迪,陈红杰,等. 基于MATLAB Robotics Toolbox 的UR5机器人轨迹规划与仿真[J].机床与液压,2018,46(23):11-15.
[3] 任军,吴正虎,曹秋玉.基于MATLAB Robotics工具箱的ER50机器人轨迹规划与仿真[J].机械设计与制造,2022(8):33-36.
[4] FANG S,MA X H,QU J R,et al.Trajectory planning for seven-DOF robotic arm based on seventh degree polynomial[M]//Pro⁃ceedings of 2019 Chinese Intelligent Systems Conference.Sin⁃gapore:Springer Singapore,2019:286-294.
[5] 周杨,杨旗,闫为佳.基于D-H参数的六轴机器人运动学分析与仿真[J].机械工程与自动化,2024(3):56-58.
[6] LIAO S.Robot trajectory planning and simulation based on Mat⁃lab robotics toolbox[J].Journal of Artificial Intelligence Practice,2024,7(1):90-100.
[7] 王林军,邓煜,罗彬,等. 基于MATLAB Robotics Toolbox 的ABB IRB1660 机器人运动仿真研究[J]. 中国农机化学报,2017,38(1):102-106.
[8] 刘鹏,张永贵,刘晨荣,等.Motoman up50机器人的轨迹规划及仿真研究[J].机械制造与自动化,2016,45(3):162-164,226.
【通联编辑:唐一东】
猜你喜欢
科技与创新(2016年23期)2017-03-30 04:12:23
中国科技纵横(2017年3期)2017-03-29 18:50:48
山东工业技术(2017年4期)2017-03-28 07:56:48
求知导刊(2017年1期)2017-03-24 22:25:58
物联网技术(2017年2期)2017-03-15 17:04:47
中国科技博览(2016年27期)2017-01-23 01:32:28
农机使用与维修(2016年12期)2017-01-17 15:23:12
安徽理工大学学报·自然科学版(2016年1期)2016-12-14 22:15:06
计算机教育(2016年7期)2016-11-10 09:01:27
中国科技博览(2016年9期)2016-04-25 10:13:28
