远距离无人机信号传输技术研究
2025-03-04 00:00:00李杰张培航
物联网技术 2025年5期

摘 要:针对无人机在远距离及恶劣环境下作业受限的问题,提出一种数传通信链路技术。利用遥控、遥测信号无阻隔传输技术,建立数传通信链路和图传通信链路,实现了远距离无人机作业和现场故障判断,确保地面基站能够接收到清晰稳定的图像数据。该信号传输技术不仅技术先进,而且具有极高的环境适应性,能够在各种恶劣环境中稳定运行,充分满足现场作业的实际需求,为无人机的远程操控与数据传输提供了强有力的技术支撑。
关键词:远距离数据传输;无人机;无阻隔传输技术;通信链路;无线传输;视频编码
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2025)05-00-03
0 引 言
随着无人机技术的不断发展,无人机的使用场景越来越广泛,其中无人机信号的传输能力是衡量无人机性能的重要指标,特别是在远距离传输数据和图像时显得尤为重要[1-3]。
现有小型多旋翼无人机只适合近铁塔区域的小范围作业,不适合执行高海拔、低温、无人区等恶劣环境下的铁塔细节巡视作业任务。鉴于恶劣环境(高海拔、低温、无人区)下对输电线路维护的迫切需求,无人机作为执行空中作业的关键平台,其作用愈发突显。因此,自主研发和装备续航能力强、具有自主导航和定位功能以及能在非通视条件下实现实时视频传输的高端无人机显得尤为迫切。这样的无人机将更好地解决人员不易达区域的输电线路缺陷检测问题,最大限度地保障输电走廊的稳定和安全[4-6]。
本文研究了一种数传通信链路技术,该技术相对简单,单跳通信距离至少可达20 km,多跳通信则通过中继实现。该中继和影像传输中继设备采用一体化设计,能够满足远距离无人机信号传输需要。
1 遥测遥控信号传输
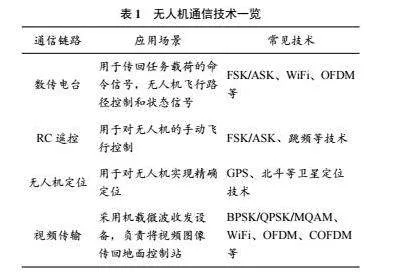
无人机、遥控装置和控制系统之间存在大量数据传输活动,这些传输需要遵循特定的格式规范,从而构建起了无人机数据传输系统。控制系统通过发送数据来控制无人机的飞行状态,无人机实时返回当前的飞行数据,方便操控人员进行控制[7-8]。目前,无人机主要通过手机或专用的遥控设备进行操作。遥控装置能够直接和无人机进行指令传输,而手机需要结合数据传输和图像传输两种方式,才能实现指令传输。由于无人机控制系统是无人机的关键设备,因此,无人机通常采用成熟可靠的数据传输方式。各类通信链路所采用的技术、应用场景和常见技术见表1。
RC遥控技术可以用于无人机的操控,其评估过程中采用了接收机与发射机来实现数据的双向发送,这一过程旨在分析无人机的操控灵敏度、动态响应范围、误码率等性能,进而完成对传输数据质量的分析。由于无人机工作环境复杂,数据传输过程中会受到干扰,为了保证无人机能够实时稳定通信,采用调频模式可以有效屏蔽干扰信号。
无人机的通信过程是一个双向过程,操控系统向无人机发送遥控指令,称为上行链路。无人机根据指令进行信息采集工作,并将采集到的数据发送给操控系统,称为下行链路。操控系统和无人机之间的信息交互通过一个中继器完成,并且无人机发送数据的速度超过其接收数据的速度[9-10]。为了保持数据同步传输,中继器采用了数据调制及解调技术,该技术主要包括MPSK调制、QAM调制、FSK调制三种方式。此外,中继器可以根据信道环境,通过自适应调制系统应用适合的调制技术,以实现准确且快速的数据发送和接收。
2 数据传输性能指标检验方案
数据传输应满足ITU-R SM.2130-1标准无线电台检查、GB/T 16611标准无线数据传输收发信机通用规范以及GB 9159无线电发射设备安全要求等规范中的基本要求。除此之外还应满足传输距离不低于3 km、数据传输准确无误、延时不超过300 ms的技术需求。对无人机相关性能指标进行检验,测试方案如下:
(1)收发装置基本参数测试
搭建好图像收发装置,启动设备后检查其视频传输基本工作情况;使用射频信号发生器和矢量网络分析仪等设备检查发射器、接收器电路是否正常工作以及电路网络参数是否正常;使用频谱分析仪、衰减器等仪器检测发射器的工作频段和信道带宽;结合误码率测试仪等设备测试收发过程中的误码率以及接收器的接收灵敏度等参数;在保证装置误码率以及接收灵敏度等参数满足最低要求的情况下测出最高移动速度;分别使用HDMI/YPbPr/AV/USB等音视频接口连接接收器与显示屏。
(2)延时和传输距离测试
延时和传输距离应同时满足要求。使用射频信号发生器、矢量网络分析仪、衰减器等仪器设备,在山区环境下测试图像收发时设备的一跳传输延时,在收发设备距离3 km的条件下进行测试;如果在3 km传输距离的最低要求下,延时可以达到指标要求,再进一步增加传输距离,测试设备在延时、误码率、接收灵敏度等参数最低指标约束下所能达到的最远传输距离,并且测试过程将发射功率约束在100 mW以内。
3 高清图像压缩技术
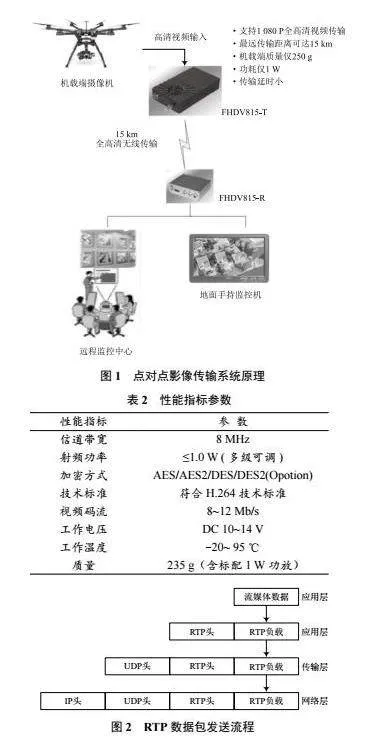
点对点影像传输系统包括机载发射机和地面接收机,目前无人机普遍采用模拟图传,图像质量差,传输距离一般在1~2 km。为了提高图像传输质量,同时增加通信距离,引入1 080 P的HDMI高清无线图传设备对无人机进行改造,实现实时、高清的视频传输。采用基于视频数字压缩编解码的无线传输机制,实现对无线视频的数字传输,达到的性能指标见表2。
整个系统的原理如图1所示。由图1可知,为保证数据传输的信息量,首先需将相机获取的的视频信号与无人机飞行过程中的性能参数叠加到一个视频源中,生成新的视频信号。然而,此时的视频信号数据量很大,且视频数据冗余度较高。为保证传输质量,需要对其进行压缩编码。采用H.264标准对其进行压缩编码,H.264标准基于数据分层设计、帧内预测编码、帧外预测编码、整数变换与量化处理、熵编码五个处理思想实现视频数据的压缩编码,能够极大地减小视频的数据量。其中,数据分层设计将视频编码分为视频编码层(VCL)和网络抽象层(NAL)。视频编码层用来对视频数据的内容进行压缩处理;网络抽象层负责编排数据格式,使视频信号得以顺利发送和接收。
4 图像传输网络协议
编码后的视频信号,采用基于RTP(Real-time Transport Protocol)流媒体实时传输协议的方案进行无线传输。RTP协议首先将经过H.264编码后的流媒体数据加上RTP头后向下发送到传输层,在传输层加上UDP头后发送到网络层,最后在网络层加上IP头后才通过网络传输至客户端。整个流程如图2所示。
当应用程序开始一个RTP会话时,为确保可靠的通信环境,系统会启用RTCP纠错功能。RTP协议和UDP协议共同完成传输层协议功能。其中,UDP协议只负责传输数据包,不管数据包传输的时间顺序。RTP的协议数据单元则是由UDP数据分组来承载,一帧数据可以被分成几个具有相同时间标签的数据包进行发送。UDP的多路复用特性使得RTP协议能够支持显式的多点投递,从而满足多媒体会话的需求。RTP协议数据单元报文结构如图3所示,其中CSRC代表数据报文来源;PT代表负载类型;Sequence number代表序列号,实现数据排序及定位,同时统计丢包率;时间戳Time stamp记录了负载中第一个字节的采样时间。
实时传输控制协议RTCP为应用程序提供会话质量或者广播性能质量信息。每个RTCP信息包不封装声音数据或视频数据,而是封装发送端或接收端的统计报表,其主要功能如下:对数据传输的质量提供反馈;提供不同媒体之间的同步传输;在会话的用户界面上显示会话参与者的标识。RTP在会话过程中会发放一些RTCP包,用来实现监听服务质量和交换会话用户信息等功能。
5 高清图传技术方案
针对多旋翼无人机无线传输能力弱的缺点,设计了一套远距离大数据无线通信平台。系统中配置了H.264视频压缩模块,能够快速且高效地进行视频压缩。在无线接收模块中,集成了缓冲区、解调模块、视频解码模块和显示模块,能够实现5 km距离的高质量视频传输和焦距信息传输。
视频采集部分的作用是将摄像机的图像信号通过压缩芯片进行视频压缩,此过程中需要初始化设备,每次采集一帧信号。
RTP是一种提供端到端传输服务的实时传输协议,建立在TCP和UDP协议之上,适合音频和视频数据的传输。在服务端,其主要任务是将H.264的视频流数据封装在RTP数据包中进行发送。客户端负责接收这些数据,并将信息反馈给服务器端。
为实现这一目标,本文选择了Hi3516A芯片,它具有低误码率、高图像质量、低功耗的特点,在视频编解码方面具有显著优势。这款芯片不仅支持H.264、MJPEG/JPEG等视频编码技术,还具备强大的视频编码处理能力以及丰富的音频编解码功能。此外,Hi3516A还支持多种音频和视频接口,确保了系统的灵活性和兼容性。
系统核心控制部分采用ARM9架构的微处理器,射频通信单元选择Nordic公司出品的nRF905无线收发芯片,整个芯片采用QFN封装,大小仅为5 mm×5 mm,并且采用ShockBurstTM工作模式。
6 结 语
本文深入探讨了数据传输的方式和检验方案,基于H.264标准探索了高清图像压缩技术,并通过研究和实现基于RTP和RTCP流媒体实时传输协议,构建了一种图像传输网络协议,从视频采集、视频压缩编码、系统核心控制以及射频通信等多个维度进行了详尽的分析。该技术确保了无人机在远距离及恶劣环境下仍能实现信号的稳定传输,充分满足了现场应用的实际需求。
参考文献
[1] 彭军,黄小春,毛鹏鹏,等.基于5G技术的无人机电力巡检应用探索[J]. 长江信息通信,2023,36(10):201-203.
[2] WEI Z, ZHU M, ZHANG N, et al. UAV-assisted data collection for internet of things: a survey [J]. IEEE internet of things journal, 2022, 9(17): 15460-15483.
[3] 熊彪.架空电力线路无人机巡检数据链路通信系统设计[J].电力系统装备,2020(9):141-143.
[4] SHAKHATREH H, SAWALMEH A, FUQAHA A A, et al. Unmanned aerial vehicles (UAVs): a survey on civil applications and key research challenges [J]. IEEE access, 2019, 7: 48572-48634.
[5]胡锦松,吴林梅,束锋,等.无人机中继协助的有限码长隐蔽通信[J].电子与信息学报,2022,44(3):1006-1013.
[6] PING Q, YING Z Z, YU L. Design of voice control system for smart home based on STM32 [J]. Applied mechanics and materials, 2015 (2): 369-374.
[7]钟思,何国民,袁煜,等.基于大数据和云计算的网络空间安全防御研究[J].科技创新与应用,2022,12(10):71-74.
[8]贾焰,方滨兴,李爱平,等.基于人工智能的网络空间安全防御战略研究[J].中国工程科学,2021,23(3):98-105.
[9] GUAN F, PENG L, PERNEEL L, et al. Open source free RTOS as a case study in real-time operating system evolution [J]. The journal of systems and software, 2016, 118: 19-35.
[10] 黄世锐.基于微分博弈的网络安全威胁预警与防御决策方法研究[D].郑州:中国人民解放军战略支援部队信息工程大学,2020.
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:34:56
软件导刊(2016年12期)2017-01-21 15:00:13
东方教育(2016年9期)2017-01-17 00:06:54
计算机时代(2016年12期)2017-01-14 21:05:51
科技创新与应用(2016年34期)2016-12-23 19:08:02
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
中国新通信(2016年16期)2016-10-18 11:00:54
企业导报(2016年9期)2016-05-26 20:58:26