
压电陶瓷驱动器迟滞非线性的改进型Bouc-Wen模型建模及试验验证
2025-03-01 00:00:00陈星宇许有熊
河南科技 2025年2期
关键词:粒子群算法

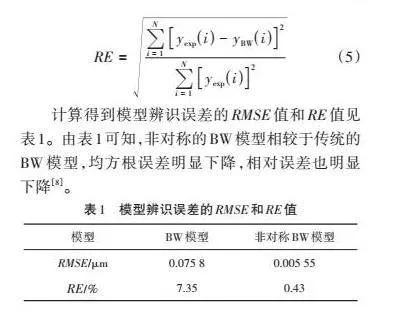



摘 要:【目的】由于压电陶瓷驱动器的迟滞特性,有必要进行迟滞建模,以提高控制精度。【方法】针对压电陶瓷驱动器输入电压与输出位移的动态迟滞特性,结合非对称静态Bouc-Wen迟滞模型,建立了压电陶瓷驱动器动态迟滞模型,并在输出端加入电压的多项式。【结果】根据试验测得压电陶瓷驱动器输入、输出数据,采用粒子群算法辨识得到驱动器的参数化模型,并通过与经典的Bouc-Wen模型进行对比,验证了该模型的有效性。【结论】试验结果表明,与经典的Bouc-Wen模型相比,在输出端加入电压的多项式,相对误差和均方根误差都有所下降,证明了所提出模型的有效性。
关键词:压电陶瓷驱动器;迟滞非线性;改进Bouc-Wen模型;粒子群算法
中图分类号:TQ174.75" " 文献标志码:A" " "文章编号:1003-5168(2025)02-0048-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2025.02.009
Abstract: [Purposes] Due to the hysteresis characteristics of piezoelectric ceramic actuators, hysteresis modeling is required to improve the control accuracy. [Methods] According to the dynamic hysteresis characteristics of the input voltage and output displacement of the piezoelectric ceramic actuators, combined with the asymmetric static Bouc-Wen hysteresis model, the dynamic hysteresis model of the piezoelectric ceramic actuators is established, and the polynomial of the voltage is added to the output terminal. [Findings] According to the experimental input and output data of the piezoelectric ceramic actuators, the parameterized model of the actuators was identified by particle swarm algorithm, and the effectiveness of the model was verified by comparing it with the classical Bouc-Wen model. [Conclusions] Experimental results show that, compared with the classical Bouc-Wen model, the relative error and root mean square error of the polynomial with voltage added to the output end are reduced, which proves the effectiveness of the proposed model.
Keywords: piezoelectric ceramic actuators; hysteresis nonlinearity; improved Bouc-Wen model; particle swarm algorithm
0 引言
微动平台是微动定位系统中的关键组成部分,可提供微米至纳米级的分辨率和步进位移。它综合了微位移驱动、执行、检测和控制等多个模块,广泛应用于显微镜、无线传感器网络、微量液体控制、振动控制等领域。
微动平台性能直接关系到微动定位系统的定位精度,而微动平台的性能很大程度上受驱动器的影响。压电陶瓷驱动器作为一种能够实现纳米级定位精度的驱动元件,因其超高分辨率、高输出功率、快速响应、低能耗、少发热、无须润滑和高定位精度等优点,被认为是微位移定位技术中理想的驱动器之一[1]。
压电陶瓷材料的迟滞非线性特性、蠕变特性、频率相关性和温度特性等对压电陶瓷驱动器的性能造成了一定影响,导致微动平台重复性下降、输出精度变差及瞬态响应速度减慢。特别是迟滞非线性特性,被认为是影响微动定位系统输出精度的主要因素,可能引起系统误差、振荡甚至异常运行。为充分发挥压电陶瓷驱动器的优势,需要采取一系列措施来减少这些不利影响,提高系统的定位精度和响应速度,进一步拓展其在微动定位领域的应用范围。目前,针对压电陶瓷的迟滞非线性特性的研究,主要有3种研究思路:一是应用多项式模型进行迟滞建模;二是通过分析内在结构和微观机理建立物理模型;三是基于输入输出映射关系提出唯象建模。常见的基于唯象模型的迟滞模型包括Preisach模型、Prandtl-Ishlinskii(PI)模型、Bouc-Wen(BW)模型和Duhem模型等[2]。
1 压电陶瓷驱动器迟滞建模
BW模型是由非线性微分方程构成的模型,具有参数少、结构简单的特点,在描述智能材料执行器的迟滞特性时得到广泛应用。然而,在复杂的压电陶瓷系统建模时,需要综合考虑其他物理因素,并结合更全面的模型来解释实际现象。实际系统的投入产出关系是不对称且非线性的,而标准BW模型是一个近似中心对称的模型。因此,对标准BW模型进行改进是必要的,改进的方法可基于输入电压与输出位移之间更准确的非线性关系。
1.1 传统BW模型
式中: [u(t)]为模型输入电压; [H(t)]为迟滞变量;[Y(t)]为模型输出位移; [u(t)]和[H(t)]分别为[u(t)]和[H(t)]对于时间的一阶导数;[α]、[β]、[λ] 和[K]均为模型参数,迟滞分量的幅值取决于[α],同时[β]和[λ]控制迟滞回线的形状,[K]是比率常数。BW模型具有参数少、解析逆模型易于求解等建模优势。
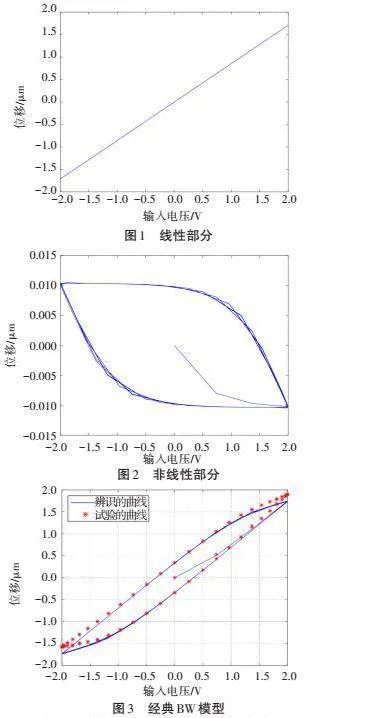
压电模型描述压电驱动系统的迟滞非线性时,迟滞环又分为线性部分和非线性部分[3]。当输入信号为正弦波,幅值A=2 V,频率f=1 Hz时,输出信号为压电微动平台的位移,线性部分和非线性部分分别如图1和图2所示,经典BW模型如图3所示。
观察迟滞曲线可以发现,迟滞非线性的分量在中心点上呈现非对称性,且输出位移的极值点与输入电压信号的极值点并不完全对应。传统的BW迟滞模型不能反映非对称特性,因此需要对传统的BW迟滞模型进行改进[4]。
1.2 非对称的BW模型
在BW模型中引入参数可以改变迟滞环的形状,使其具有不对称性。根据传统的BW模型,对其进行改进。传统的BW模型输出位移是关于电压的一次方。因此,在输出位移中加入电压的多项式进行比较。
2 参数辨识
首先,设立了一个粒子群,其中每个粒子代表了非对称BW迟滞模型的一组潜在参数集。这些参数涉及模型特征和性能的多个方面。在每次算法迭代中,计算每个粒子对应模型的预测输出,并将其与实际系统的输出进行比较,以获得一个测试函数值。
其次,采用基于误差的测试函数,来度量模型预测与实际观测数据之间的偏差。通过对实测位移采样点数量m进行评估,可以了解每个粒子的表现。通过计算模型预测值与实际观测值之间的误差度量(如均方误差、相对误差等),为每个粒子分配一个测试函数值。
再次,进行局部最优和全局最优的更新。对于每个粒子,比较其当前迭代中的测试函数值与之前记录的局部最优值,如果当前值更优,更新该粒子的局部最优值及其位置信息。然后,将所有粒子的局部最优值与当前的全局最优值做比较,以确定是否找到了更优的全局解。如果有更优的全局解,将更新全局最优值及其位置信息。
在更新粒子的速度和位置时,采用了带有惯性权重的PSO(Particle Swarm Optimization)算法。该算法允许粒子在搜索空间中具有一定的惯性,同时会受到个体最优和全局最优位置的吸引。通过调整惯性权重、个体学习因子和社会学习因子等参数,可以控制粒子的搜索行为,以实现在全局范围内寻找最优解的目标,具体见式(3)。
式中:[vk+1i]为第i个粒子在第k+1次迭代时的速度向量;[ω(k)]为第k次迭代时的惯性权重,可以是常数或随时间变化的;[c1]和[c2]为学习因子,分别代表个体最优和社会最优的影响权重;[r1]和[r2]为在[0,1]范围内的随机数;[pki]为第i个粒子在第k次迭代时的个体最优位置;[pkg]为整个粒子群在第k次迭代时的全局最优位置;[xki]为第i个粒子在第k次迭代时的位置。
最后,持续进行迭代,直到满足某个停止条件,比如测试函数值收敛到某个阈值以下或达到预设的最大迭代次数。一旦满足停止条件,算法将输出全局最优解,即识别出的非对称BW迟滞模型的参数值[5]。
3 试验过程
3.1 试验平台的搭建
所搭建的测控系统硬件主要包括装有LabVIEW的PC机、NI控制器、PI功率放大器及基于液压放大的压电精密运动平台实物样机。NI控制器负责实现实时控制、数据发送和数据采集等功能,包括实时控制模块(NI CRIO 9024)、数据发送模块(NI CRIO 9263)和数据采集模块(NI CRIO 9411)等。该试验平台硬件原理如图4所示,测控系统如图5所示。
3.2 动态迟滞模型验证
为了验证本研究所提出的模型在描述压电驱动器迟滞特性时的优势,采用1 Hz的单一正弦激励信号进行非对称的BW模型试验[6],得到的结果如图6、图7和图8所示。
4 结语
本研究对BW模型进行了改进,引入了输入信号电压的多项式函数,用于描述压电驱动平台的迟滞非线性。通过采用PSO算法辨识模型参数,优化后的迟滞模型能更好地匹配实际迟滞曲线。试验利用基于NI实时控制器平台,通过正弦波输入测得响应位移。选择1 Hz进行两种模型的对比试验,结果表明,非对称的BW模型,能更好地拟合压电陶瓷驱动器的迟滞非线性特性。
参考文献:
[1]RANA M S, POTA H R, PETERSEN I R. A survey of methods used to control piezoelectric tube scanners in high-speed AFM imaging[J].Asian Journal of Control, 2018, 20(4): 1379-1399.
[2]王琴琴,周孟德,孙晨晋,等.压电叠堆作动器率相关迟滞非线性建模研究[J].压电与声光,2022,44(6):907-912.
[3]张世欣.具有非线性回滞压电陶瓷的建模与控制[D]. 郑州:中原工学院, 2023.
[4]张段芹,冯炳昊,曹宁,等.压电驱动器的率相关迟滞特性建模与测试[J].压电与声光,2022,44(4):614-618.
[5]贺一丹,王贞艳,何延昭,等.压电陶瓷作动器的改进Duhem迟滞建模[J].压电与声光,2021,43(3):431-434.
[6]周民瑞,周振华,刘鑫,等.压电执行器改进Bouc-Wen模型及其定位补偿控制研究[J]. 振动与冲击, 2023, 42(10) :155-164.
[7]李泽琨.压电陶瓷作动器迟滞非线性建模与补偿控制研究[D].哈尔滨:哈尔滨工业大学, 2022.
[8]朱斌,朱玉川,李宇阳,等.压电叠堆执行器迟滞建模与前馈补偿研究[J].压电与声光,2018,40(1):38-41, 46.
猜你喜欢
软件导刊(2017年1期)2017-03-06 21:00:02
电子技术与软件工程(2017年1期)2017-03-06 20:38:07
电脑知识与技术(2016年30期)2017-03-06 20:13:33
现代电子技术(2017年3期)2017-03-04 21:34:52
现代电子技术(2017年3期)2017-03-04 08:19:58
中小企业管理与科技·中旬刊(2016年11期)2017-02-17 17:21:18
南水北调与水利科技(2016年5期)2016-12-27 14:57:39
预测(2016年5期)2016-12-26 10:04:59
电脑知识与技术(2016年12期)2016-06-14 19:27:24
商(2016年5期)2016-03-28 18:10:26
