高速公路沥青路面无人驾驶智能碾压施工技术应用研究
2025-02-26 00:00:00卞宇翔
交通科技与管理 2025年2期



摘要 为解决传统摊铺碾压施工存在的平整度控制较差、施工效率低、路面边缘位置压实度不足等问题,文章以某高速公路工程为例,展开了高速公路沥青路面无人驾驶智能碾压施工技术的应用研究。首先详细介绍了路面无人驾驶智能碾压施工技术原理,包括无人驾驶系统组成、技术优势等,并依托实体工程进行了应用;然后归纳总结了无人化碾压施工关键技术要点,提出了“3+3+1”的碾压方案,并设定无人化集群碾压轨迹为“S”形;最后分别对无人化集群施工试验段和传统工艺施工段进行了工后质量检测。结果显示,无人碾压路段的压实度分布更加集中,压实均匀性优于有人碾压路段,无人驾驶智能碾压施工技术的应用效果良好。
关键词 平整度;无人驾驶;智能碾压;压实度
中图分类号 U416 文献标识码 A 文章编号 2096-8949(2025)02-0060-03
0 引言
智能化、无人化技术已逐渐渗透各个行业领域,为传统产业带来了革命性变革。在高速公路建设中,沥青路面施工作为关键的一环,其质量直接关系道路的使用性能和安全性能。传统的沥青路面碾压施工技术虽然在一定程度上保障了施工质量,但在施工效率、成本控制及施工质量的均匀性等方面仍面临诸多挑战。因此,引入无人驾驶智能碾压施工技术,成为提升高速公路沥青路面施工质量、降低施工成本、提高施工效率的重要途径。
1 路面无人驾驶智能碾压施工技术原理
1.1 无人驾驶系统
无人驾驶压路机作为无人驾驶系统的核心设备,集成了感知模块、轨迹规划与决策模块、通信模块及控制执行模块。各个模块之间协同工作,使得压路机能够自主完成复杂的施工任务[1]。
(1)感知模块负责收集周围环境信息。利用激光雷达、高清摄像头等多种传感器,压路机能够实时感知施工区域的地形、障碍物及其他可能影响施工的因素。
(2)轨迹规划与决策模块基于感知模块提供的信息,结合高精度北斗卫星导航定位系统(BDS)和RTK定位技术,为压路机规划出最佳的行驶路径和碾压方案。
(3)通信模块主要负责数据传输。利用5G信息传送技术,压路机能够实时将施工数据、设备状态等信息上传至后台监测系统,同时接收来自后台的指令和参数调整。
(4)控制执行模块是无人驾驶压路机的“执行者”,根据轨迹规划与决策模块制定的方案,通过控制压路机的发动机、传动系统、液压系统等关键部件,实现压路机的行驶制动、转向、碾压作业等系统动作。
(5)后台监测系统对整个无人驾驶碾压施工过程进行实时监测和管理。系统接收来自压路机的实时数据,对施工进度、设备状态、施工质量等进行全面的分析和评估。一旦发现异常情况或施工偏差,后台监测系统能够立即发出警报并采取相应的处理措施,保证施工的安全和顺利进行。
1.2 施工工序
通常运用具有施工区域采集功能的智能摊铺机进行摊铺作业,在作业过程中详细采集施工区域的轨迹数据,为压路机提供路径参考。随后,智能摊铺机通过5G信息传送技术,将采集到的施工轨迹信号迅速、准确地传送至无人驾驶碾压系统的控制中心,由其规划出每台压路机的碾压轨迹。工业控制计算机是压路机的“大脑”,负责接收并解析轨迹信号,指挥压路机按照预定轨迹进行作业。压路机接收到信号后,开始协同作业,一旦遇到障碍物或偏离预定轨迹,压路机能够迅速做出反应,调整作业方式,及时纠偏、避免相互之间发生碰撞,最终完成沥青路面的无人化碾压施工。
1.3 技术优势
(1)安全性高。传统的施工方法常常依赖大量的人力操作,增加了施工区域的人员密度,提高了由于人为操作失误而引发安全事故的风险。而无人驾驶碾压机群配备了自动预警、紧急停车、自动避障等多重安全防范措施,对潜在的安全隐患进行预警和干预,从而降低了施工区域的安全风险。
(2)施工速度快。无人驾驶压路机根据提前设定好的碾压轨迹、速度等参数,可自动控制碾压设备完成既定的行驶、转向等一系列工作,无须人为干预和调整。传统的沥青路面施工受人力、天气等因素影响较大,而无人驾驶碾压机群则可以通过远程唤醒、休眠功能全天候不间断地进行施工,有效避免了因人为因素或天气原因导致的施工中断,显著提高了施工速度。
(3)工程效益良好。人力成本方面,无人驾驶碾压技术显著减少了现场作业人员数量,据估算可减少约40%的现场作业人员,既降低了人工成本,也减少了作业人员长时间暴露在高温和刺激性烟气环境中的风险,提升了作业人员的健康水平。其次,无人集群施工实现了摊铺与碾压速度的最优匹配和连续不间断作业,施工效率提升了30%,显著缩短了工期。
2 无人化集群施工关键技术
2.1 压路机运动学控制技术
在无人化控制系统中,压路机接收到控制指令后,能够直接转化为对车辆动作的直接控制。当车辆获取到预设的目标路径后,利用内置的高级算法自主计算并调整合适的车速与转角,从而精准、稳定地驶入目标路径,极大提高了施工效率,也大大减少了人为操作误差。同时,压路机还具备速度斜坡启停(软启软停)功能,在启动和停止时,压路机的速度变化平滑,不会出现急起急停的情况,能够显著减少对路面的冲击和破坏,避免路面出现离析,提升路面压实质量。
2.2 密实度雷达检测技术
虽然众多厂家在智能压实传感器领域进行了大量研发,但却鲜有真正实现质的突破的成果[2]。该项目通过搭建精细的碾压模型,将施工区域进行网格化划分,对每一个网格单元内的路面密实度实现精确监控。借助雷达检测技术,可以实时获取路面材料的密实度、轮迹等信息,并将获取的关键数据作为无人施工过程中的重要参数。在无人施工系统中,将实时采集的状态信息整合到整个控制流程中,形成了一个闭环调节机制。系统能够根据实时反馈的路面密实度数据,自动化、智能化调节压路机的碾压遍数、振动频率及振动幅度,确保每个施工网格单元都能达到最佳的压实效果。相较于传统的人工操作,无人驾驶智能压路机能够更加精准地控制压实参数,避免了人为因素带来的误差和不确定性。
2.3 集群施工工艺策略算法
压路机集群采用高精度定位的移动站技术,将移动站分布在施工区域的两侧,实时获取施工区域的三维数据,为压路机提供精确的施工指导。每台压路机可以根据施工需求和实时数据,自动调整速度、方向、碾压遍数等作业参数;压路机之间彼此快速、高效协调配合,形成一个有序、高效的施工集群。此外,算法还具备避免冲突和意外突发情况的处理能力。在施工过程中,如果出现潜在的冲突或意外情况,算法能够迅速做出反应,及时调整压路机的作业状态,避免事故的发生。在集群化策略的实现上,策略算法采用紧跟慢压模式,压路机在跟随摊铺机进行作业时,将根据实时数据调整自身的速度和位置,与摊铺机保持适当的距离和角度。同时,结合碾压遍数的控制,充分保障整个施工区域得到均匀、充分的碾压。压路机集群梯队作业方式如图1所示:
3 无人驾驶智能碾压施工技术应用效果分析
3.1 工程概况
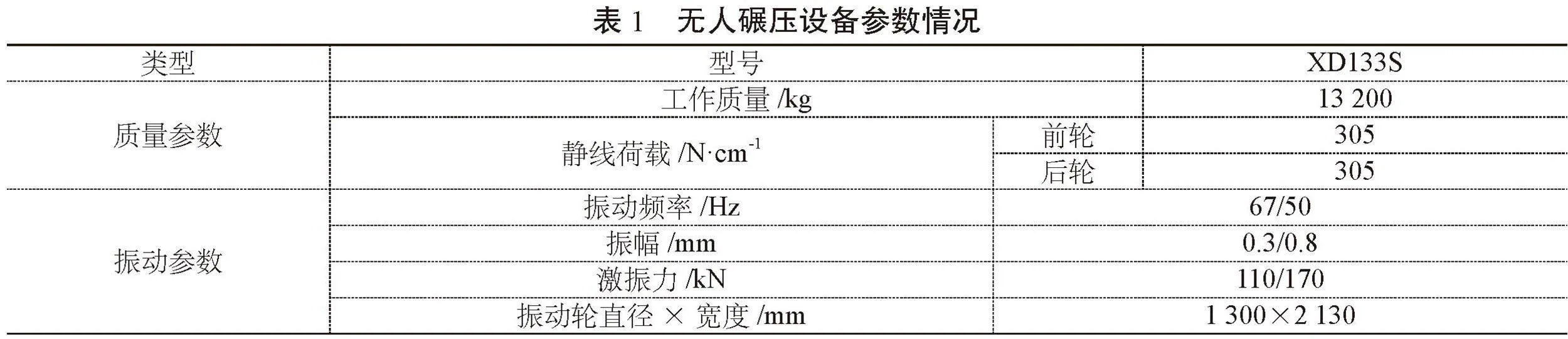
该项目依托某高速公路工程,选择合适试验段进行无人驾驶智能碾压施工,无人驾驶智能压路机型号与设备参数如表1所示,施工段全长2 km。为对比分析无人化集群施工效果,选择合适段落采用传统施工工艺进行沥青混合料的摊铺碾压施工。
3.2 碾压施工关键技术要点
(1)横向接缝施工。随着摊铺机向前推进,当其与无人驾驶双钢轮压路机(以下简称压路机)拉开一定的距离后(约15~20 m),压路机便会自动启动,从中间位置按照预设的碾压路径开始工作,呈45°角向一端进行碾压,保证接缝处均匀受力,避免产生压实不均或接缝不平整的问题。在碾压过程中,压路机会先通过前振后静的方式进行作业。随着压路机的移动,先从先铺的路面上逐渐跨过接缝,后移至新铺的面层进行压实。
(2)初压阶段至关重要,应在混合料尚未产生推移、开裂等不利状况时尽早进行,压路机通过高精度传感器和实时数据分析,迅速判断最佳碾压时机,在尽可能高的温度状态下开始作业,不留等待的间隙。初压和复压过程应严格遵循“紧跟、慢压、高频、低幅”的原则。此外,该项目对碾压遍数进行了优化,将以往的“2+2+1”碾压方案改为“3+3+1”,按照叠轮1/2方式进行碾压。
(3)无人集群按照规划的碾压路径进行有序施工,无人碾压轨迹主要采用“S”形,如图2所示。这种碾压方式的优点是碾压工作效率高、轨迹简单易操作。压路机在施工过程中“软启软停”,且通过错开前后轮的碾压位置防止拥包现象。压路机呈阶梯形前进,不宜停留在同一断面处。
(4)在传统碾压施工中,因受限于摊铺、碾压机械设备宽度,路面边缘位置通常压实度不足。在无人化集群施工过程中,操作人员可以通过手持平板设备实时监控压路机的工作状态,并根据需要一键调整碾压到边的距离,使得压路机能够精确地抵达施工区域的边缘,保证路面边缘位置得到充分的压实。
3.3 施工效果分析
完成摊铺、碾压施工后,分别对无人化集群施工试验段和传统工艺施工段进行工后质量检测,并分析对比“有人、无人”施工效果。该项目将检测点分为一般点位及特殊点位,其中一般点位为按照规范要求的检测频率随机选择的检测点位;特殊点位为两侧边缘处、欠压处、接缝处、压路机停机点处、起终点处等。
3.3.1 常规检测指标效果对比
(1)渗水系数方面。无人施工段一般点位的渗水系数平均值为16 ml/min,略小于有人施工段一般点位的19 ml/min;无人施工段特殊点位的渗水系数平均值为48 ml/min,大于有人施工段的23 ml/min。
(2)压实度方面。无人施工段一般点位的压实度平均值为95.9%,与有人施工段的95.4%基本相当;无人施工段特殊点位压实度平均值为95.6%,优于有人施工段的94.8%。
(3)构造深度方面。无人施工段的一般点位构造深度平均值为0.93 mm,与有人施工段的0.88 mm基本相当,无人施工段特殊点位的构造深度平均值为0.91 mm,与有人施工段一致。
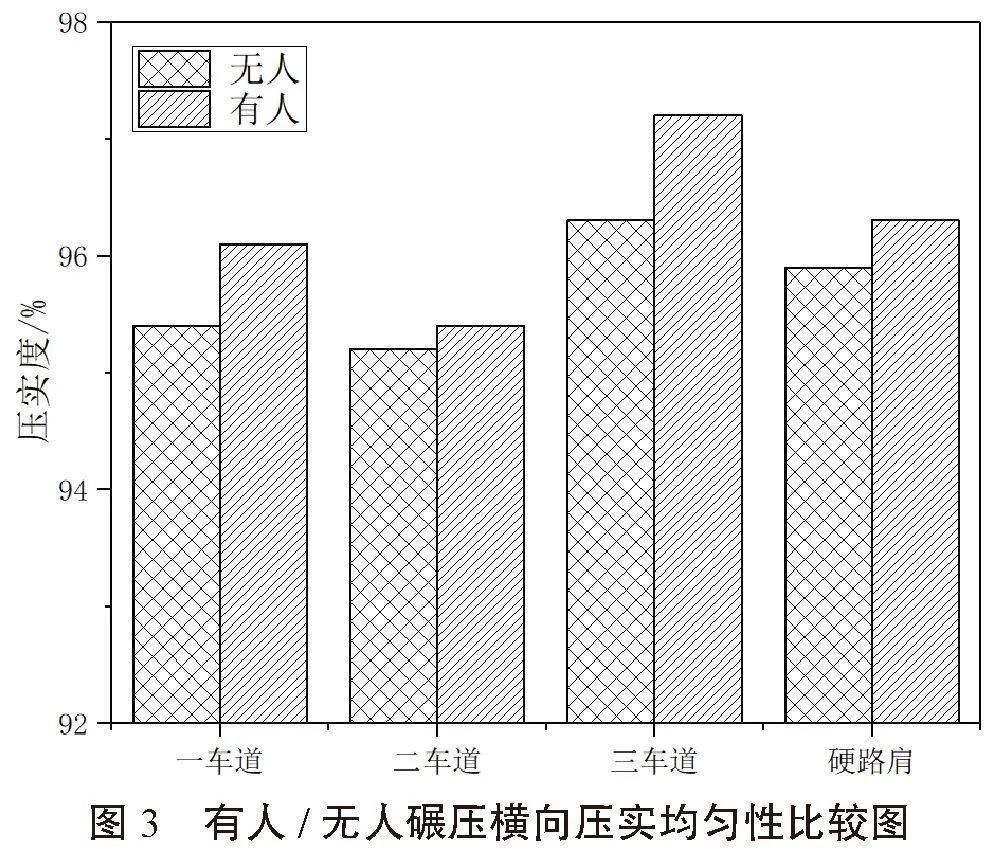
3.3.2 基于探地雷达的压实均匀性效果对比分析
采用三维探地雷达对沥青路面压实均匀性进行检测评价,具体检测分析结果如表2、图3所示。
通过观察分析表2、图3的压实均匀性效果,可得出以下结论:
(1)无人碾压的压实均匀性更好,其变异系数为0.41%,小于有人施工段的0.52%。
(2)无人碾压路段的压实度分布更加集中,说明无人碾压路段的压实均匀性优于有人碾压路段。
(3)通过对不同车道的压实均匀性可以看出,无人碾压段的压实均匀性略好于有人碾压段。
4 结语
(1)根据以往工程经验,该项目对碾压遍数进行了创新与优化,将以往的“2+2+1”碾压方案改为“3+3+1”,按照叠轮1/2的方式进行碾压。
(2)无人化压路机集群碾压轨迹采用“S”形,该种碾压方式具有碾压工作效率高、轨迹简单易操作的优点。
(3)由三维探地雷达检测结果可知,无人碾压路段的压实度分布更加集中,压实均匀性略好于有人碾压路段。
参考文献
[1]邱海兵,卢继乾,李波.沥青路面无人化摊铺施工技术应用[J].交通科技与管理, 2023(24):138-140.
[2]李伟华.沥青路面智能摊铺碾压技术研究[J].运输经理世界, 2022(34):16-18.
猜你喜欢
作文小学中年级(2022年9期)2022-09-08 06:13:30
科学(2020年3期)2020-11-26 08:18:28
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
建材发展导向(2019年11期)2019-08-24 06:36:06
建材发展导向(2019年10期)2019-08-24 06:25:40
江西建材(2018年1期)2018-04-04 05:26:16
大陆桥视野·下(2016年11期)2017-02-28 10:04:05
建材发展导向(2015年6期)2015-10-29 09:25:43
科技视界(2015年25期)2015-09-01 18:09:21
建材发展导向(2014年2期)2014-05-04 12:19:01