
汽车智能刮水系统的应用及其装调工艺
2025-02-22 00:00:00王晓东俞海林何晨曦
汽车工艺师 2025年2期








摘要:介绍了刮水器电子马达的应用及基本结构,同时分析了智能刮水系统的装调工艺,总结了整车厂安装过程中的工艺方案研究。刮水系统的革新也是行业内研究的重要对象,其形式的研究备受行业关注,而更安全更智能的刮水系统也逐渐代替传统机械刮水系统。
关键字:刮水器电子马达;装调工艺;工艺方案
随着汽车电动化、智能化的推进,汽车刮水系统也朝着更加智能化及人性化发展,在满足基本刮刷功能和实用性的前提下,向着汽车性能多样化、驾驶更安全的方向发展,刮水系统与汽车整体安全性也成为行业关注的重点。
汽车刮水系统是驾驶安全的重要保证,它的作用是刮刷前后风挡玻璃的雨雪等杂质,使得驾驶员能在多变的天气以及外界污染情况下,获得清晰的视野。因此,刮水系统在行车中能得到清晰的视野尤为重要。
汽车刮水系统发展至今已有100多年的历史,如今,随着汽车工业的发展,刮水器技术已经非常成熟,但这个在行车时必不可少的装置却并非与生俱来。从最初的无刮水器模式到手动刮水器指导当前的现代式刮水器,其结构及形式发生了翻天覆地的变化。
汽车刮水器电动机常见类型和结构
1.常见类型
刮水器电动机按照设计结构可分为有连杆刮水器电动机及无连杆刮水器电动机。
有连杆刮水器电动机顾名思义就是刮水器电动机上存在四连杆机构,如图1所示,刮水器电动机通常与蜗轮蜗杆的机械部分集成在一起。蜗轮蜗杆提供减速增扭的作用。刮水器连杆通过传动装置将电动机的动力传递给刮水器臂,使其能够有效地清洁风挡玻璃。
而无连杆刮水器电动机其本体无连动杆机构,刮水器电动机直接将电动机动力传递给刮水器臂,如图2所示,其优点是更利于汽车前舱空间小的设计,更好地布置刮水系统。
2.刮水器电子马达和刮水器机械马达对比
刮水器电子马达相比机械马达,内部结构发生了较大的变化。
常见的刮水器马达由电动机部件、减速机、减速箱、传动涡轮及传动蜗杆等构成,那么刮水器机械马达和刮水器电子马达最大的区别就在于机械马达没有控制模块。机械马达一旦起动,就会360°的旋转下去,而电子马达中有电子控制模块,可以控制马达来回旋转。
相比传统的机械刮水器,智能的电子刮水器马达可以将刮水器臂达到更低的停靠位置,使汽车布置更加美观,同时低的停靠位置使得风噪变小,提供驾驶员更加舒适的体验感;与此同时还可以使刮水器臂达到更多的刮刷区域,使得前风挡玻璃更加干净视野更加清晰。
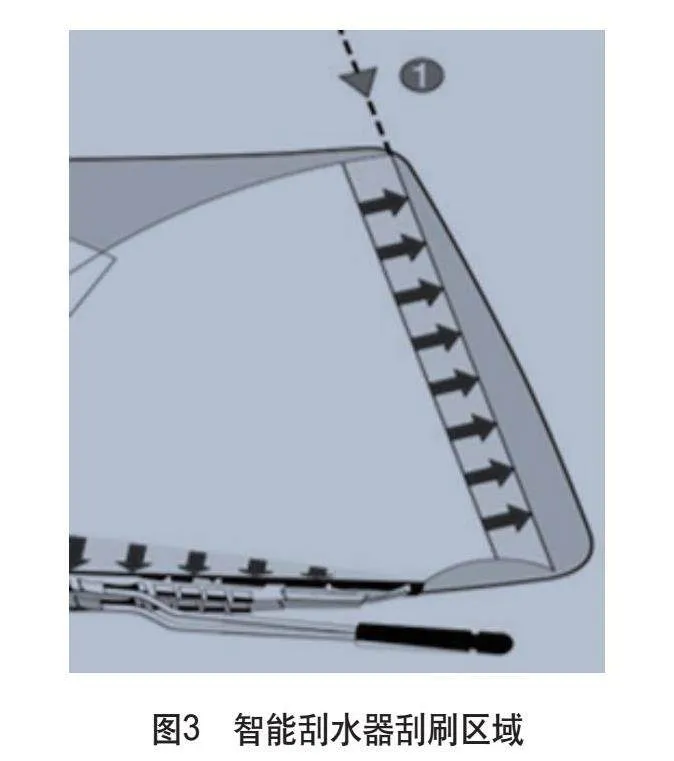
智能的电子刮水器可以刮刷到A柱及通风盖板更靠近的位置,如图3所示箭头区域即是比机械刮水器所能多刮刷的部分。因为机械马达没有电子模块控制,所有的误差均有机械系统及其力学性能累计,为保证刮水器臂在刮刷过程不打到A柱及通风盖板,必须在设计时留有一定距离作为刮刷余量。然而智能刮水器电动机有电子模块,可以通过参数补偿来控制电动机上下刮刷时的加速度及角度,更大的增加刮刷面积。
智能刮水系统装调工艺研究
1.智能刮水系统与机械刮水系统的安装方式对比
汽车中常见的机械刮水系统定位方式大致分为两种,一种是通过三个螺栓紧固至车身固定支架上,另一种则是通过两个螺栓外加一个定位结构固定至车身支架上,其安装过程无特殊注意事项,但在安装刮水器臂时需使用定位工装将其固定于前风挡玻璃白点位置。
对于智能刮水系统,其安装方式与机械刮水器安装方式相同,但由于智能刮水器使用电子马达,其马达内部无机械结构锁止,这样在安装刮水器臂的过程,对电子马达的控制就尤为重要,需要一些工艺手段来达到所需要求。
2.智能刮水系统安装控制必要性及方案
机械刮水系统,在刮水器臂安装过程中,因刮水器马达的内部机械结构,可以很好地锁止电动机轴,安装过程仅需定位工装固定即可,如图4所示。
智能刮水器马达由于内部集成电子模块,如图5所示,其刮水器臂安装过程,若整车未保持通电状态,电子模块无命令信号,此时智能刮水器无锁止功能,因此整车厂在安装刮水器臂时工艺控制尤为重要。
主机厂对智能刮水系统安装工艺控制主要有两类:刮水器电子马达原位控制及刮水器臂安装过程控制。刮水器电子马达原位控制,即电子马达零件在进入主机厂及刮水器臂安装前,保证电动机轴在原位置。刮水器臂安装过程控制,即刮水器臂安装并湿刮后可保持与风挡玻璃白点对齐,误差在±5mm以内。
为了保证刮水器臂在安装过程中电动机轴不偏转,设计者也将刮水器电动机增加连动杆机构,更好地控制刮水器电动机轴偏转。除了在产品设计方面上进行控制外,依据整车安装情况,也可能有在安装过程中进行调整操作的需要,下文将分别对刮水器电子马达原位控制及刮臂安装定位等装调方案进行阐述。
智能刮水器电子马达原位控制方案
1.产品特征控制方案
刮水器为了传导动力并改变动力方向,产品在设计时常常采用四连杆机构,如图6所示,曲柄、连杆和摇杆等杆件将刮水器电动机的旋转运动转化为摇臂的往复运动;然而四连杆机构不仅可以提供刮水器臂所需传导动力,同时对智能刮水器电动机轴保持原位提供锁止功能,这样在刮水器电动机运输过程,对原位控制起到较好的控制作用。
2.工艺控制方案
(1)复位设备" "对于无四连杆机构的智能刮水器电动机,大部分整车厂在安装刮水器臂时采用整车通电,但是整车通电紧固刮水器臂会存在一定的安全风险,刮水器臂紧固过程可能会移动,打伤操作人员,同时潜在对蓄电池存在耗电现象,所以对于无四连杆机构的智能刮水器电动机,在安装刮水器臂时需考虑使用外接设备模拟整车供电给刮水器电动机锁止信号,完成刮水器臂安装。设备概念如图7所示。常见智能刮水器电动机Bosch和Valeo,其刮水器电动机在整车厂安装刮水器臂时,使用外接设备进行带电复位,为了对刮水器臂具有锁止功能,需让刮水器电动机供应商提供电动机插头阵脚定义及电子架构。该方案会增加一定的操作时间及设备成本。
复位设备基本操作流程为:刮水器电动机安装至整车固定位置,将复位设备插头插接至电动机插头并设备上电,完成刮水器电动机复位控制。
刮水器臂安装控制:由于刮水器臂在工艺过程中为较后安装,因进气格栅等零件遮挡刮水器电动机,导致不能直接连接刮水器电动机,这时可通过UEC模块取电,实现电动机供电锁止,控制刮水器臂安装并紧固,安装完毕后设备移除。
(2)定位工装" "在保证智能刮水器电动机锁止的前提下,刮水器臂的安装位置尤为重要,刮水器臂合适的安装位置将决定整车起动刮水系统湿刮的质量,刮水器臂安装的位置过高或者过低都将影响挂刷位置精度,所以整车厂安装刮水器臂定位显得尤为重要。
常见刮水器臂安装定位为前风挡玻璃的白点,它作为刮水器臂定位基准,定位工装设计在进气隔栅板及刮水器臂之间,定位后工装不能活动,如有必要可使用吸盘吸附在前风窗玻璃上,定位及固定建议参照表1。工装与前刮水器臂配合处上下可调,且能锁紧,如图8所示。
综合以上分析,当整车厂引入智能刮水器电动机时,使用复位锁止设备及定位工装的方案可以使整车质量更高,安全风险越低,对总体生产线的影响较小。
结语
智能刮水器不仅在设计上满足人们对汽车的个性化需求,更是给汽车智能化带来了更多可能。随着汽车设计与生产工艺水平的不断提升,智能刮水器的应用将越来越具备普适性,逐渐成为外饰设计中的主流,其相关工艺未来也将向着高精度、更安全的方向发展。
猜你喜欢
故事作文·低年级(2023年2期)2023-05-30 10:48:04
防爆电机(2020年6期)2020-12-14 07:17:06
模具制造(2019年4期)2019-06-24 03:36:46
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
Coco薇(2015年10期)2015-10-19 12:12:32
汽车维护与修理(2015年7期)2015-02-28 12:18:21
汽车维护与修理(2015年5期)2015-02-28 12:16:33
汽车维护与修理(2015年1期)2015-02-28 12:15:27
