不同林分郁闭度与坡度下机载LiDAR最优点云密度
2025-02-19 00:00:00段海澎熊亮刘旻昊董秀军
人民长江 2025年1期




摘要:
机载激光雷达技术(light detection and ranging,LiDAR)的发展为茂密植被山区的地质灾害调查提供了新型方案。该项技术高度依赖地面点的密度,而地面点密度的大小与激光穿透率和原始点云密度息息相关,需要评估不同植被密度条件下实际获取的最优点云数量,从而满足调查比例尺下的DEM(Digital Elevation Model)插值要求。以安徽省黄山市周边地形复杂的山区为研究测区,研究了不同林分郁闭度及地形坡度条件下穿透率与地面点密度间的关系,以及原始点云密度与地面点密度间的关系,并根据调查比例尺要求获取了不同精度的数字地形产品;再对以各点密度构建出的DEM进行量化评价,以反算得出针对安徽省山区地质灾害调查的机载LiDAR最优原始点云采集密度推荐值。结果表明:郁闭度与坡度和地面点密度之间存在负相关关系,且郁闭度影响更大;原始点云密度超一定阈值后,地质灾害的识别并不能得到显著优化;根据实验结果确立针对安徽省山区地质灾害1∶500调查比例尺下机载LiDAR最优点云采集密度推荐值,当林分郁闭度分别为[0.7,1.0),[0.2,0.7),[0,0.2)时,对应的点云密度推荐值分别为[65,90),[45,65),[16,45)pts/m2。
关" 键" 词:
最优点云密度; 机载LiDAR; 郁闭度; 地形坡度; 地面点密度; 地质灾害调查; 安徽省
中图法分类号: P237
文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2025.01.017
收稿日期:2024-05-16;接受日期:2024-09-11
基金项目:
国家自然科学基金项目(42072306);安徽省交通控股集团科技项目(JKKJ-2020-45)
作者简介:
段海澎,男,正高级工程师,博士,主要从事公路工程地质灾害和特殊路基研究。E-mail:hfdhp@163.com
Editorial Office of Yangtze River. This is an open access article under the CC BY-NC-ND 4.0 license.
文章编号:1001-4179(2025) 01-0125-07
引用本文:
段海澎,熊亮,刘旻昊,等.
不同林分郁闭度与坡度下机载LiDAR最优点云密度
[J].人民长江,2025,56(1):125-131.
0" 引 言
安徽省地质构造复杂、地形地貌多变,长江、淮河贯穿境内,加之受亚热带季风气候影响,以及不规范的生产活动,导致安徽省在每年集中降水期内地质灾害频发[1-3]。传统的地质灾害人工调查方法在大面积区域工作时,无法准确获取灾害的相关信息,且存在调查效率低、人员安全无法得到保障等问题,难以查明库区高位隐患的灾害以及山区茂密植被覆盖下的地质灾害类型与迹象[4]。通过机载LiDAR技术可穿透植被获取精确的三维信息,为河道沿岸陡峭山体的地灾识别调查、水工建筑物的维护设计、水库科研勘测等水利专业工作提供数据支撑[5-8]。
机载LiDAR现场扫描后获得的原始数据集称为点云,而点云的采集密度则会直接影响DEM的精度。在数据采集的过程中,由于植被覆盖程度复杂多样,因此很难直接评估出构建用于地质灾害调查的DEM的采集点密度[9]。一方面,已有的不同比例尺下构建DEM的点云采集密度标准是面向测绘行业制定的,但此规范并不适用于地质灾害调查工作。相较于地形测绘,地质灾害调查获取点云的目的是解译地质灾害、提取灾害信息,更加注重微地貌的形态[8-11]。另一方面,地质灾害识别依赖于对地形特征的增强显示,而地面点密度又决定着数据增强显示的效果,但考虑到时间效率成本等影响,不能一味增加原始点云密度以提高地面点密度,因此针对点云采集密度优化的研究是十分必要的[12-16]。
目前,国际上对于机载LiDAR采集点云密度的研究主要集中于以测绘为目的的方向,Liu等[17]研究发现将原始点云数据抽稀后,依旧可以在一定程度上具备DEM数据精度;Zhou 等[18]研究得知用于地貌学领域的DEM最佳分辨率为0.5 m,然而对于地形复杂且植被覆盖密度不均的山区,所需要的采集密度也会有所区别。沈永林等[19]以海地地震诱发的滑坡体为研究对象,基于高分辨率航空影像和机载LiDAR数据,进行了多源数据地物分类和滑坡识别的有益尝试。虽然机载LiDAR技术已经在地质灾害的识别与监测方向开始逐步推广应用,但仍存在许多实际应用问题亟待研究。一是现有遥感数据采集的精度规范多为测绘领域服务,且同时具备遥感与地质专业经验的调查人员稀缺,因此缺乏应用于地质灾害遥感调查领域的直观数据;二是相关方向的应用参考多以单体典型灾害为主,面向大范围复杂山区的调查研究还待完善;三是在已有对中国西南山区机载LiDAR地质灾害调查的研究基础上,演变应用于中国东南安徽省山区地质灾害的研究还存在较大经验缺口[20-23]。
针对以上问题,本文以安徽省黄山市周边地形复杂山区为依托,从激光穿透率对地面点密度影响的实验以及原始点云密度对地面点密度影响的实验两个角度分析,同时根据均方根误差量化评价DEM质量,以反算得出针对安徽省山区地质灾害调查的机载LiDAR最优原始点云采集密度推荐值。
1" 研究区概况
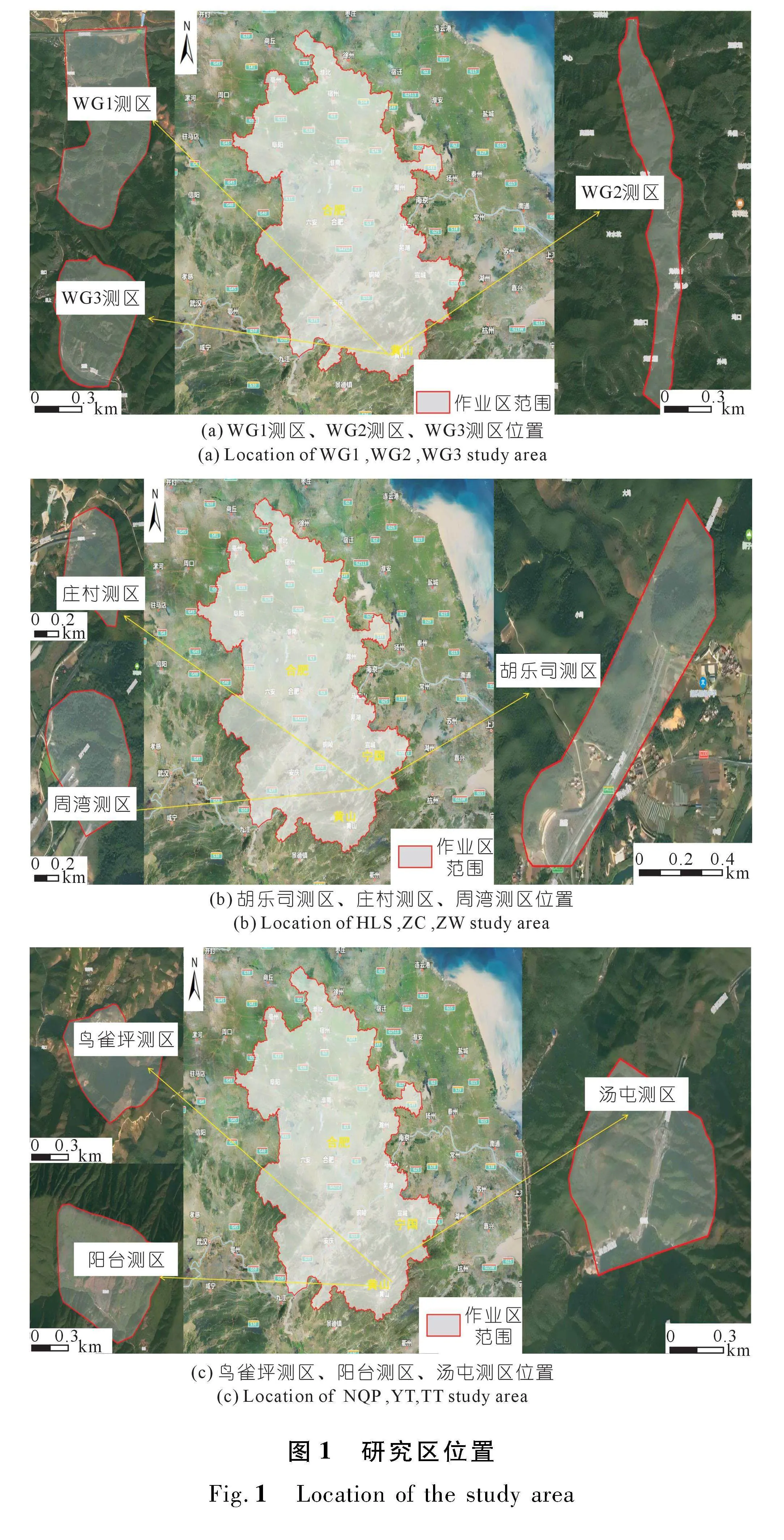
研究前期,笔者团队对安徽省黄山、宣城、安庆等区域的铜汤、汤屯、黄塔桃、宁绩、六潜等多条运营山区高速公路开展了地质灾害LiDAR遥感调查工作。本研究以前期调查工作选定的9个地质灾害重点防治区域为研究对象,总面积约20 km2,见图1。其中选定“G3W德州至上饶高速公路祁门至皖赣界段拟建高速(K0—K1+580)”为WG1测区,区内高速公路沿线纵贯山谷;选定“G3W德州至上饶高速公路祁门至皖赣界段拟建高速(K2+430—K14+750)”为WG2测区,区内纵穿高速公路且散布村镇居民;选定“G3W德州至上饶高速公路祁门至皖赣界段在建高速(K22+070—K23+430)”为WG3测区,区内有河谷与公路穿过;选定“溧宁高速(胡乐司隧道进口处)”为胡乐司(HLS)测区,区内有一条高速公路穿过且覆盖隧道口;选定“鸟雀坪村”为鸟雀坪(NQP)测区,区内主要发育有几处古老滑坡,且有村镇分布于坡面;选定“汤屯”为汤屯(TT)测区,区内有一处高速互通,且公路一侧山体发育有一处古滑坡;选定“阳台村”为阳台(YT)测区,区内发育有3处大型滑坡,且坡面有村镇分布;选定“溧宁高速(周湾隧道进口处)”为周湾(ZW)测区,区内有铁路桥通过;选定“溧宁高速(庄村隧道进口处)”为庄村(ZC)测区,区内有高速隧道口通过。此9个研究区及周边为安徽省地质灾害多发、易发区,且区域内涉及居民与重要交通线路较多。从地质特征上看,出露地层多为前震旦系浅变质岩与火山碎屑岩;从地貌特征上看,地形起伏较大,坡度多处大于25°,山地面积占比近80%;从气候特征上看,属亚热带季风湿润气候,年均降水量约在1 400~1 900 mm,这些特征对于地质灾害来说都具有极强的诱发性[24]。
2" 数据与实验方法
2.1" 数据获取与处理
此次机载LiDAR数据的采集使用奥地利RIEGL激光测量系统公司的RIEGL VUX-1LR激光雷达系统,激光发射频率为820 kHz,精度为15 mm,重复精度为10 mm,视场角为330°,扫描速度为10~200 r/s。
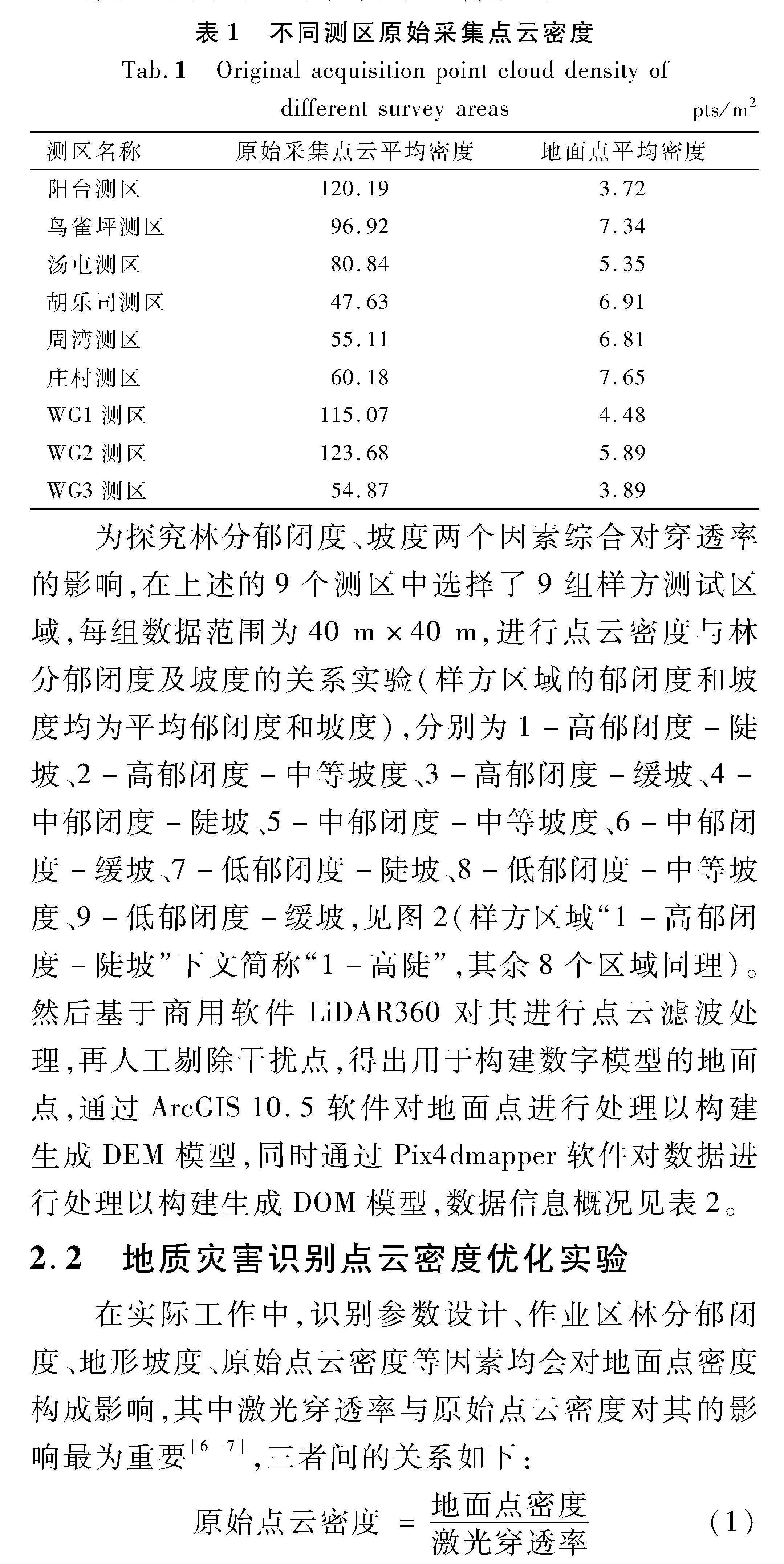
研究测区内地形地貌较为复杂,在坡度0~70°均有分布,且植被多样,主要分布有原始常绿、落叶阔叶混交林和黄山松纯林。由于不同测区的地形地貌及植被覆盖情况不一,故针对不同测区采集不同的原始点云密度。不同测区的采集点云密度见表1。
为探究林分郁闭度、坡度两个因素综合对穿透率的影响,在上述的9个测区中选择了9组样方测试区域,每组数据范围为40 m×40 m,进行点云密度与林分郁闭度及坡度的关系实验(样方区域的郁闭度和坡度均为平均郁闭度和坡度),分别为1-高郁闭度-陡坡、2-高郁闭度-中等坡度、3-高郁闭度-缓坡、4-中郁闭度-陡坡、5-中郁闭度-中等坡度、6-中郁闭度-缓坡、7-低郁闭度-陡坡、8-低郁闭度-中等坡度、9-低郁闭度-缓坡,见图2(样方区域“1-高郁闭度-陡坡”下文简称“1-高陡”,其余8个区域同理)。然后基于商用软件LiDAR360对其进行点云滤波处理,再人工剔除干扰点,得出用于构建数字模型的地面点,通过ArcGIS 10.5软件对地面点进行处理以构建生成DEM模型,同时通过Pix4dmapper软件对数据进行处理以构建生成DOM模型,数据信息概况见表2。
2.2" 地质灾害识别点云密度优化实验
在实际工作中,识别参数设计、作业区林分郁闭度、地形坡度、原始点云密度等因素均会对地面点密度构成影响,其中激光穿透率与原始点云密度对其的影响最为重要[6-7],三者间的关系如下:
原始点云密度=地面点密度激光穿透率
(1)
故本节主要从激光穿透率验证与不同原始采集点云密度的影响两方面着手分析地质灾害识别调查的最优地面点密度,并对不同地面点密度构建出的DEM进行量化评价以对最优地面点密度进行验证,从而反算出原始点云采集密度的最优推荐值。
2.2.1" 激光穿透率实验
本节对于激光穿透率的分析主要从林分郁闭度与地形坡度对于地面点密度的影响关系着手研究。
(1) 林分郁闭度。林分郁闭度也称林冠层盖度,决定着林分结构以及光、水等生态因子透过林冠在林分内的分布状况,可以有效反映激光的穿透能力[11]。针对此次研究,结合树冠的闭合程度,将林分郁闭度人工划分为低、中、高3个等级:① 树冠闭合程度为[0,0.2),郁闭度划分为Ⅰ级(低郁闭度);② 树冠闭合程度为[0.2,0.7),郁闭度划分为Ⅱ级(中郁闭度);③ 树冠闭合程度为[0.7,1.0],郁闭度划分为Ⅲ级(高郁闭度)。
此次实验使用机械布点法以获取郁闭度,即在作业区布设N个样点,在每个样点的位置上垂直仰视树冠层,据此判断此样点位置树冠覆盖的情况,将被树冠覆盖的样点数统计出来,并利用公式(2)计算郁闭度:
郁闭度=被覆盖的样点数总样点数
(2)
即树冠在阳光直射时的总地面投影面积(总冠幅)与此处作业区林地总面积的比值,若地面被树冠的投影完全覆盖则郁闭度表示为1.0,其次为0.9,0.8,0.7,…,0,依此类推。
(2) 坡度。坡度为坡面的垂直高度H与水平宽度L的比,即坡角的正切值。本次研究将获取得到的数字高程模型(DEM)基于ArcGIS软件的坡度分析工具,将其定义为陡坡(>50°)、中等坡度(20°~50°)、缓坡(<20°)共3个不同等级的坡度。之后采用同一宏命令对不同郁闭度与坡度下的激光穿透率进行处理,并进行人工手动检查后,得到各样方区域的穿透率测试结果。
2.2.2" 原始点云密度实验
地面点密度受原始点云密度的直接影响,从应用于地质灾害调查的地貌学宏观研究角度来说,当原始点云密度达到一定数值后,依旧不断增加点云密度,数字地形产品的精度并不会得到显著提高,不能获取更多的有效地形细节。因此,需实验找出既能对微地貌进行有效识别,又在合理取值区间的最优点云密度。在确定了地面点密度与林分郁闭度存在负相关关系的情况下,还需明确地质灾害特征与点云密度之间的关系,即明确地面点密度与原始点云密度之间的具体匹配关系。针对该实验区,本文根据区内发育地质灾害的面积大小,分别选取了2处面积大于0.1 km2的滑坡和2处面积小于500 m2的滑坡,通过对地面点抽稀以获得不同点云数据进行对比实验,比例尺选取1∶500,以0.2 m的构网间距内插生成三角网格模型,探究地面点密度大小与滑坡要素识别之间的关系。
2.2.3" DEM量化评价与地面点密度选取方法
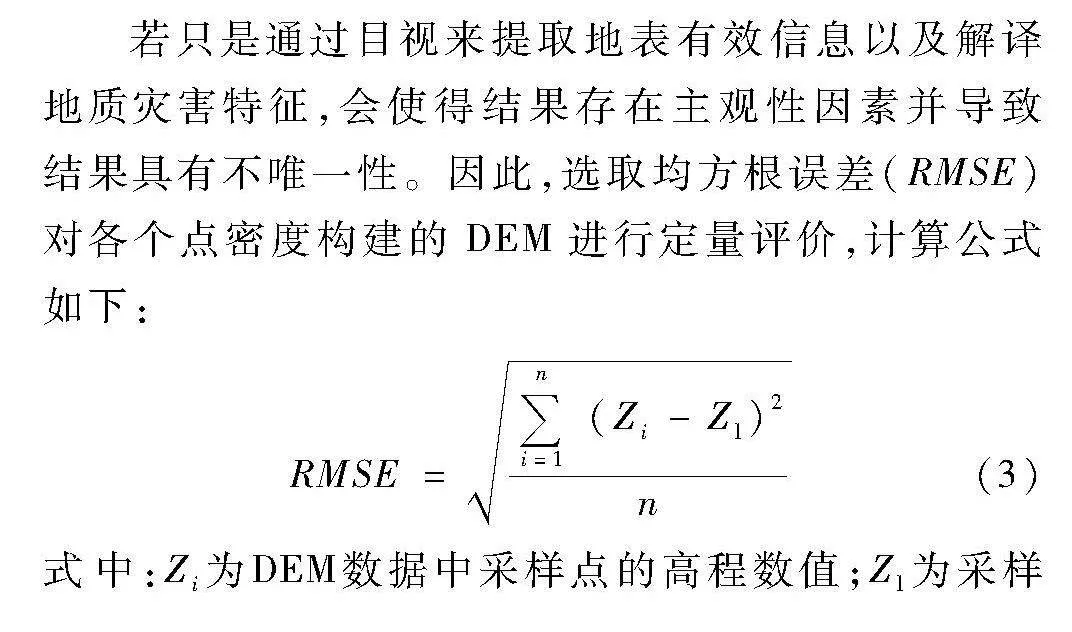
若只是通过目视来提取地表有效信息以及解译地质灾害特征,会使得结果存在主观性因素并导致结果具有不唯一性。因此,选取均方根误差(RMSE)对各个点密度构建的DEM进行定量评价,计算公式如下:
RMSE=ni=1(Zi-Zl)2n
(3)
式中:Zi为DEM数据中采样点的高程数值;Zl为采样
点的实际高程数值;n为采样点的个数。均方根误差(RMSE)对DEM评价指标的数值越小,则说明DEM中的采样点高程值与实际高程数值之间的误差越小,即DEM越符合真实地形条件。
最终从激光穿透率对地面点密度的负相关影响以及原始点云密度对地面点密度的正相关影响两个角度分析,同时根据均方根误差量化评价DEM质量,以反算得出针对安徽省山区地质灾害调查的机载LiDAR最优原始点云采集密度推荐值。
3" 结果与分析
3.1" 点云密度优化实验结果
3.1.1" 激光穿透率实验结果
不同样方区域的地面点密度变化及穿透率变化测试结果见表3。从仅对比单一因素——林分郁闭度来看,植被穿透率与林分郁闭度整体上呈现负相关趋势,且地面点密度与激光点云的植被穿透率存在正比关系,则地面点密度与林分郁闭度之间存在负相关关系。对比同一郁闭度条件下3个不同等级坡度的穿透率可知,坡度大小对于穿透率的影响不大,其中高郁闭度条件下穿透率最低,平均穿透率稳定在5.75%;中郁闭度条件下穿透率一般,平均穿透率稳定在7.89%;低郁闭度条件下穿透率最高,平均穿透率稳定在10.63%。
3.1.2" 原始点云密度实验结果
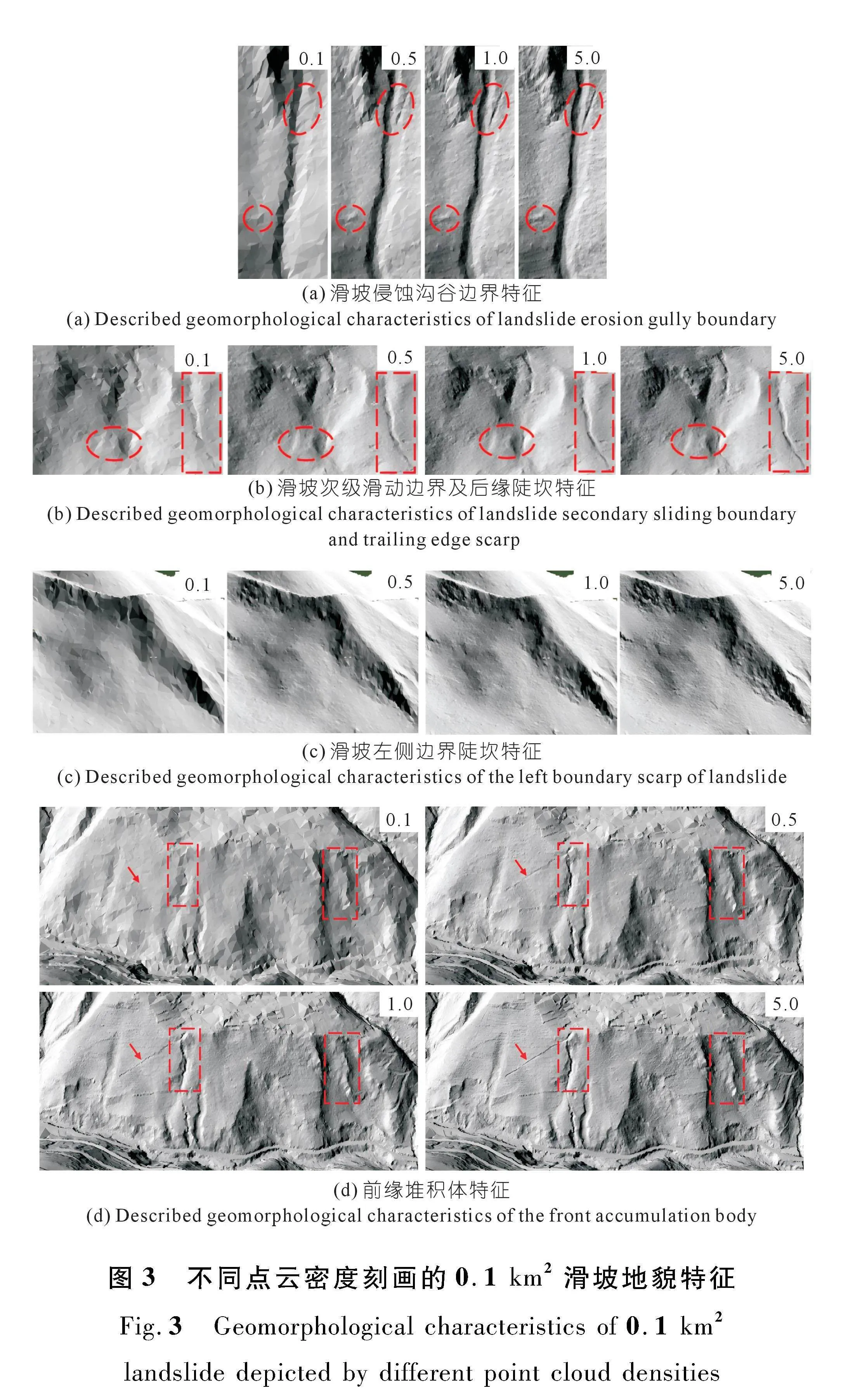
如图3所示,通过一系列点云密度实验,从不同地面点密度刻画面积大于0.1 km2的滑坡侵蚀沟谷边界形态(图3(a))、后缘陡坎及次级滑动边界地貌特征(图3(b))、滑坡左侧边界陡坎特征(图3(c))及前缘堆积体特征(图3(d))几个方面研究了点云密度与地貌特征之间的关系。结果表明:点云密度在 0.1~5.0 pts/m2时,地貌特征随点云密度的增加而不断清晰,但点云密度超过1.0 pts/m2达到5.0 pts/m2时,地貌特征并未得到显著优化。
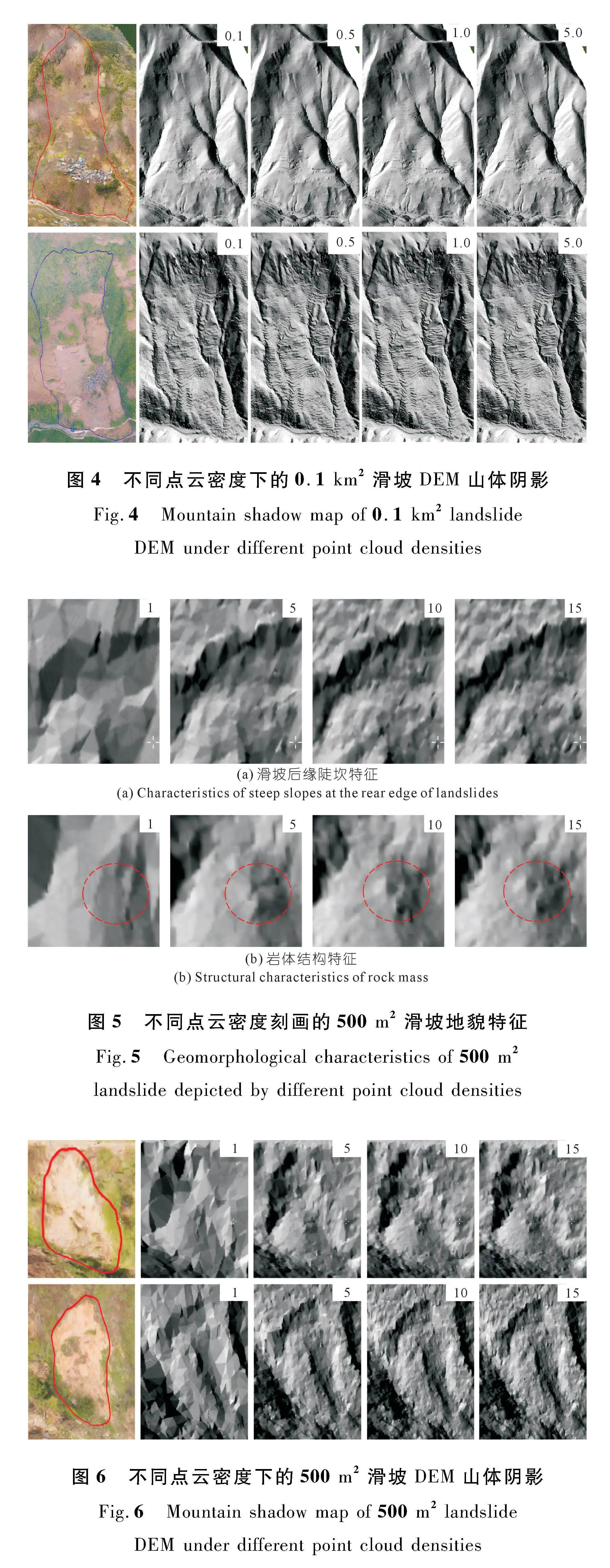
测区内2个面积大于0.1 km2的滑坡DEM山体阴影图见图4。从图4可以看出,滑坡边界与滑坡地貌特征会随着点云密度的增加而愈发清晰,当点云密度达到0.5 pts/m2后,便可以完整识别出滑坡的形态,之后再增加点云密度也仅是稍微提高滑坡要素特征的识别能力,并且当点云密度达到1.0 pts/m2后,并不会识别出更细节的要素。
如图5所示,通过一系列点云密度实验,从不同地面点密度刻画面积小于500 m2的滑坡后缘陡坎边界地貌特征(图5(a))及岩体结构特征(图5(b))两个方面研究了点云密度与地貌特征之间的关系。结果表明:点云密度在 1~15 pts/m2之间时,地貌特征随点云密度的增加不断清晰,但点云密度超过10" pts/m2达到15 pts/m2时,地貌特征并未得到显著优化。
测区内2个面积小于500 m2的滑坡DEM山体阴影图见图6。从图6可以看出,滑坡边界与滑坡地貌特征会随着点云密度的增加而愈发清晰,当点云密度达到5 pts/m2以后,便可以完整识别出滑坡的形态,之后再增加点云密度也仅是稍微提高滑坡要素特征的识别能力,并且当点云密度达到10 pts/m2后,并不会识别出更细节的要素。
3.1.3" DEM量化评价结果
分别对0.1 km2和500 m2面积滑坡的不同点云抽稀程度的DEM高程误差进行定量计算,得到的均方根误差(RMSE)均为厘米级。从图7~8可以看出,随着点云密度的增大,高程误差会随之不断减小,不过误差范围均控制在0.042~0.418 m。对于500 m2滑坡,当点云密度为5 pts/m2时,DEM的高程RMSE为0.22 m;对于0.1 km2滑坡,当点云密度为0.5 pts/m2时,DEM的高程RMSE为0.34 m,全部满足对DEM高程RMSE的误差要求。
3.2" 最优采集点云密度选定
从激光穿透率实验结果分析可知,基于高郁闭度条件下平均穿透率稳定在5.75%;中郁闭度条件下平均穿透率稳定在7.89%;低郁闭度条件下平均穿透率稳定在10.63%,从识别更多地质灾害的角度出发,应将地面点密度数据控制在5 pts/m2以上。
从原始点云密度实验结果分析可知,若想对微地貌达到高精度识别作用,对于识别面积大于0.1 km2的地质灾害,地面点数据基本要控制在0.5 pts/m2以上,而对于识别面积小于500 m2的地质灾害,地面点数据基本要控制在5 pts/m2以上。
基于上述实验结果,由于原始点云采集密度=地面点密度/激光穿透率,同时设备的高程精度在植被茂密山区存在误差,且设备硬件条件有限,基于当前情况,点云采集密度确实存在阈值,当超出阈值范围后并不能显著优化地质灾害的识别能力。因此针对安徽省山区地质灾害调查的机载LiDAR原始点云采集密度推荐值如表4所列。
据此再进行点云数据采集时,便可于野外用目测法先将林分郁闭度估测出来,再参照此表根据估测郁闭度选取所对应的点云采集密度区间。同时在实践工作中,还需根据不同的地形条件以及具体需求进行适时的调整,如果在个别小区域作业时,出现区域内林分郁闭度区间变化较大的情况,则应选取较高的郁闭度区间所对应的原始点云采集密度。
4" 结 论
以安徽省黄山市周边地形复杂的山区为研究测区,综合考虑林分郁闭度、地形坡度、地质灾害调查需求、时间效率成本等因素,提出适用于安徽省山区地质灾害调查最优点云采集密度范围,并得出以下结论:
(1) 在只考虑单一因素影响条件下,激光穿透率与郁闭度之间存在负相关关系,且坡度对穿透率的影响远远低于林分郁闭度,故野外获取数据时应着重考虑林分郁闭度对穿透率的影响。
(2) 对于面积小于500 m2的滑坡,将地面点密度控制在5 pts/m2以上能较好识别其边界等要素特征;对于面积大于0.1 km2的滑坡,将地面点密度控制在0.5 pts/m2以上能较好识别。
(3) 虽然原始点云密度的增加会使得地面点密度也随之增加,但不应一味追求提高原始点云密度,当其超过一定阈值后,并不会显著优化地质灾害特征的识别能力,且综合考虑经济时间成本等因素,可适当地将原始点云密度调整到90 pts/m2左右,地面点密度大于5 pts/m2,以便于更精确地识别微小地形特征。
参考文献:
[1]" 王国强,徐威,吴道祥,等.安徽省环境地质特征与地质灾害[J].岩石力学与工程学报,2004(1):164-169.
[2]" 吴明堂,姚富潭,杨建元,等.基于倾斜摄影测量与INSAR技术的库区滑坡识别[J].人民长江,2023,54(3):130-137.
[3]" 毕自航,李素敏,袁利伟,等.基于InSAR的乌东德水电站库区边坡形变监测及分析[J].人民长江,2024,55(1):143-150.
[4]" SANTANGELO M,CARDINALI M,ROSSI M,et al.Remote landslide mapping using a laser rangefinder binocular and GPS[J].Natural Hazards and Earth System Sciences,2010,10(12):2539-2546.
[5]" 郭晨,许强,董秀军,等.复杂山区地质灾害机载激光雷达识别研究[J].武汉大学学报(信息科学版),2021,46(10):1538-1547.
[6]" 潘星,佘金星,董秀军,等.基于机载LiDAR遥感技术的滑坡早期识别研究:以深圳盐田区为例[J].测绘,2020,43(6):243-247.
[7]" 孙涛,徐明宇,董秀军,等.机载LiDAR技术应用于茂密植被山区地质灾害调查[J].测绘通报,2021(4):90-97.
[8]" 董秀军,邓博,袁飞云,等.航空遥感在地质灾害领域的应用:现状与展望[J].武汉大学学报(信息科学版),2023,48(12):1897-1913.
[9]" 吴福,廖泽源,何娜,等.面向茂密植被山区地质灾害调查的LiDAR点云密度优化研究[J].武汉大学学报(信息科学版),1-11[2024-01-12].http:∥doi.org/10-13203/j.whugis 20230386.
[10]陈涛.机载激光雷达技术在构造地貌定量化研究中的应用[J].国际地震动态,2015(6):44-46.
[11]许强,郭晨,董秀军.地质灾害航空遥感技术应用现状及展望[J].测绘学报,2022,51(10):2020-2033.
[12]刘小莎,董秀军,钱济人,等.高植被山区泥石流物源LiDAR遥感精细识别方法研究[J].武汉大学学报(信息科学版),2024,49(3):400-410.
[13]孙涛.滑坡隐患机载LiDAR增强显示与识别方法研究[D].成都:成都理工大学,2021.
[14]贝祎轩,陈传法,王鑫,等.机载LiDAR点云密度和插值方法对DEM及地表粗糙度精度影响分析[J].地球信息科学学报,2023,25(2):265-276.
[15]王康康,郑学东,赖旭东.机载LiDAR点云密度与DEM产品精度关系研究[J].测绘地理信息,2021,46(3):78-82.
[16]黄德华.福建山区机载LiDAR微地貌识别最优点密度研究[J].测绘与空间地理信息,2023,46(10):132-136.
[17]LIU X Y,ZHANG Z Y,PETERSON J.The effect of LiDAR data density on DEM accuracy[C]∥Proceedings of the 17th International Congress on Modelling and Simulation.Christ Church,2007:1363-1369.
[18]ZHOU L,HEITAROK,SAKAE M.Detection of subtle tectonic-geomorphic features in densely forested mountains by very high-resolution airborne LiDAR survey[J].Geomorphology,2013,182:104-115.
[19]沈永林,李晓静,吴立新.基于航空影像和LiDAR数据的海地地震滑坡识别研究[J].地理与地理信息科学,2011,27(1):16-20,115.
[20]彭艺伟,董琦,田冲,等.基于机载激光雷达的地质灾害识别关键技术及应用研究[J].安全与环境工程,2021,28(6):100-108.
[21]TULAR B,LOZI E,EICHERT S.Airborne LiDAR-derived digital elevation model for archaeology[J].Remote Sensing,2021(9):1855.
[22]AGUERAVEGA F,AGUERAPUNTAS M.Effects of point cloud density,interpolation method and grid size on derived digital terrain model accuracy at microtopography level[J].International Journal of Remote Sensing,2020,41(21):8281-8299.
[23]DUKA A,TOMLJANOVIC K,FRANJEVIC M.Application andaccuracy of unmanned aerial survey imagery after salvage logging in different terrain conditions[J].Forests,2022,13:2054.
[24]申家莲,张兵.黄山市地质灾害的特征分析及预报[J].安徽农业科学,2004(6):1225-1226.
(编辑:刘 媛)
Study on optimal cloud density of airborne LiDAR under different forest canopy densities and slopes
DUAN Haipeng1,XIONG Liang1,LIU Minhao2,DONG Xiujun2
(1.Anhui Transportation Holding Group Co.,Ltd.,Hefei 230000,China;
2.State Key Laboratory of Geological Disaster Prevention and Geoenvironmental Protection,Chengdu University of Technology,Chengdu 610059,China)
Abstract:
The development of airborne LiDAR technology provides a new solution for geological hazard investigation in densely vegetated mountainous areas.This technology highly relies on the density of ground points,which is closely related to the laser penetration rate and the original point cloud density.It is necessary to evaluate the optimal number of point clouds obtained under different vegetation density conditions in order to meet the DEM (Digital Elevation Model) interpolation requirements at the survey scale.Taking the mountainous area with complex terrain around Huangshan City,Anhui Province as the study area,the relationship between the penetration rate and the ground point density under different forest canopy density and terrain slope,as well as the relationship between the original point cloud density and the ground point density were studied,and digital terrain products with different precision were obtained according to the requirements of the survey scale.Then,the DEM constructed by the density of each point was quantitatively evaluated to inversely calculate the recommended value of airborne LiDAR optimal cloud acquisition density for geological disaster investigation in mountainous areas of Anhui Province.The results indicated that there was a negative correlation between canopy density and slope on ground point density,and canopy density had a greater impact.After the original point cloud density exceeded a certain threshold,the identification of geological hazards cannot be significantly optimized.Based on the experimental results,the recommended values for the optimal cloud collection density of airborne LiDAR for geological hazards in mountainou areas of Anhui Province at a scale of 1:500 were established,when the forest canopy density was [0.7,1.0),[0.2,0.7),[0,0.2),the corresponding recommended values for point cloud density were [65,90),[45,65),[16,45] pts/m2.
Key words:
optimal cloud density; airborne LiDAR; canopy density; terrain slope; ground point density; geological hazard investigation; Anhui Province
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
福建林业(2020年5期)2020-03-18 08:23:02
中国铁道科学(2019年5期)2019-10-19 07:55:14
城市道桥与防洪(2019年5期)2019-06-26 00:56:04
热带林业(2019年4期)2019-03-05 09:53:58
测绘通报(2018年10期)2018-11-02 10:07:28
森林工程(2018年3期)2018-06-26 03:40:46
电气化铁道(2016年4期)2016-04-16 05:59:46
河北遥感(2015年2期)2015-07-18 11:11:14