基于简易视觉标签的高精度室内定位技术
2025-02-17 00:00:00熊禹高锋马杰
重庆大学学报 2025年1期




关键词:室内定位;视觉定位;误差分析;加权最小二乘
中图分类号:TH7 文献标志码:A 文章编号:1000-582X(2025)01-045-09
随着人工智能等技术的飞速发展,智能移动平台在医疗、仓储物流、工业生产等领域的应用需求日益增加。精确的室内定位作为其关键技术之一,是实现导航、决策等自主行为的基础[1]。与其他应用场景相比,室内定位对计算复杂度、部署便利性和抗干扰能力有更高要求。室外环境中,卫星能够提供准确全天候的定位、授时服务,且技术成熟稳定。但在室内环境,由于建筑物遮挡、传播干扰和多径效应等,卫星信号会严重衰减导致失效[2]。
根据室内定位使用的信号类型不同,主要包括基于无线信号和视觉信息两类定位技术。室内定位主要通过无线测距、测角或位置指纹等方式实现定位。常用的无线信号包括WIFI、蓝牙、UWB(ultra wide band)等,在室内受多径效应、非视距传播等影响,信号基站的部署成本相对高昂。基于视觉的定位技术主要包括SLAM(simultaneous localization and mapping)和标签定位。前者通过对环境特征的提取与匹配能够在未知环境下进行建图和定位,但算法复杂度高、环境适应性弱、实时性差、应用难度大。视觉标签定位技术预先存储标签特征及坐标信息,应用时通过标签检测和匹配实现绝对定位,算法复杂度低。其中,选择视觉标签和定位算法是实现低成本高精度室内定位的关键。
在视觉标签选择方面,Guan等[3]以室内标志牌等特殊物体作为标签,离线提取SURF(speeded-up robustfeature)特征点构成标签数据库。该方式无需改造环境,但特征点信息多,且易受光照等环境因素影响。为降低存储需求,Hong 等[4]利用相对较少的屋顶角点。张梦珠等[5]则将语义分割与定位算法相结合以提高特征匹配速度,但语义分割会消耗大量计算资源。
采用自然标签无需改造室内环境,但桌子、墙角等自然标签的特征通常较为类似,为正确区分不同标签的坐标带来了困难。为此,有学者提出人工标签,通过编码方法将标签ID、坐标等信息嵌入到标签中,以保证标签的唯一性[6]。但标签复杂的编码信息导致其识别复杂度较高,耗时达到几百毫秒[7]。此外,复杂的编码纹理也更容易受到环境光照、污染物等影响。
定位算法常采用图像匹配或几何约束法。徐聪[8]根据数据库中标签图像与实时采集的标签图像之间的多视图几何关系进行位姿估计。Li 等[9]采用模板匹配法,通过仿射变换实现定位。图像匹配过程主要依赖特征提取和匹配,导致算法复杂度高。与之相比,几何约束法根据标签和传感器间的几何关系实现定位,计算量小。Hong 等[4]采用双目相机对视觉标签进行测距,由距离公式获取位姿信息,精度可达厘米级。但双目相机存在视差,且左右图像匹配的计算资源消耗大[10]。韩锟等[11]同时测量多个标签的距离,由几何约束的超定方程组通过最小二乘法估计位姿,在计算复杂度和精度方面总体更具优势。但当标签冗余量不够或位置特殊导致约束方程组奇异时,定位误差会急剧增加[12]。
针对视觉标签室内定位存在的问题,文中面向智能移动平台提出一种基于简易视觉标签的室内高精度定位方法。针对简易标签纹理特征不唯一问题,设计了基于相机FOV(field of view)和方位角的快速查询匹配方法。在分析标签分布特性与定位误差关系基础上,提出加权最小二乘位姿估计算法,建立迭代求解和最优估计的协同策略,实现了算法复杂度和定位精度的良好平衡。通过实验对所提方法的性能进行验证和分析,与UWB 相比定位误差得到了大幅降低。文中的主要贡献为:1)针对简单视觉标签的非唯一性,提出一种快速查询匹配策略;2)制定加权最小二乘和迭代求解的协调策略,在共圆奇异和一般工况下均能实现位姿的精确估计;3)设计基于简易视觉标签的室内定位系统,该系统具有高实时性、高精度、易部署和抗干扰强等优点;4)通过仿真和实验对比验证了所提定位系统的性能。
1高精度室内定位系统设计
视觉标签的选择和定位算法是实现高精度室内定位的关键。
1.1视觉标签设计
考虑如下因素,采用图1所示的简易视觉标签[13]:1)自然纹理特征不受控,极易受环境干扰;2)编码标签具有唯一性,但识别更复杂,且精细的编码纹理也易受干扰;3)相机的色彩解析能力强,且RGB 是基础颜色空间;4)圆形具有易检测、鲁棒性好和视角不变性等优点。
通过色彩和形状特征进行标签识别,根据标签圆心进行方位角检测,从而提高抗干扰能力,降低视觉处理算法的复杂度。但是,标签简单特征使其不具有唯一性,导致无法根据其特征直接获取坐标实现定位。
1.2高精度定位算法
针对简易视觉标签的非唯一性问题,结合几何约束定位精度高、算法复杂度低等优点,设计图2所示的高精度定位算法。
在标签特征唯一且坐标已知的情况下,当观测到的标签数量不少于3个时,可根据式(1)实现定位,冗余观测有利于提高定位精度和鲁棒性[11]。但文中采用的标签仅具有简单的色彩和形状特征,不具有唯一性。为此,在第2节提出基于相机FOV和方位角的快速查询匹配方法,在无需遍历标签数据库的前提下实现标签的快速准确匹配。然后,为根据观测到的标签位置实现高精度定位,在分析标签分布特性与定位误差关系基础上,提出加权最小二乘位姿估计算法,建立迭代求解和最优估计的协同策略,实现了算法复杂度和定位精度的良好平衡,具体参见第3节。
2标签搜索匹配策略
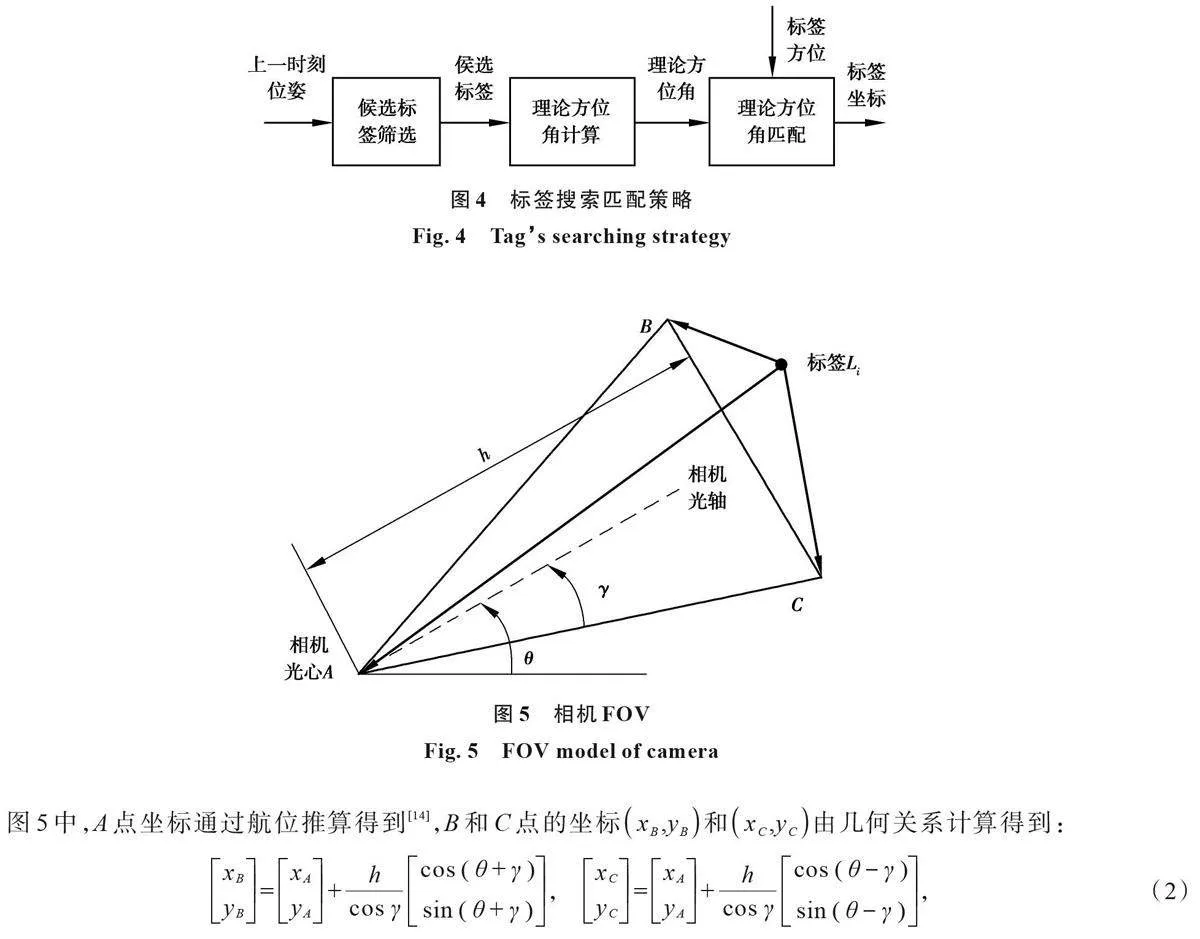
设计的标签搜索匹配策略如图4所示,考虑的因素如下:
1)相机仅能观测到其FOV内的标签,因此根据当前位姿信息筛选标签数据库中可能观测到的标签(即候选标签),可避免遍历数据库,提高匹配效率和可靠度;
2)当候选标签与相机观测标签一致时,两者的方位角一致,因此可利用该特性进行标签匹配。
2.1候选标签筛选
为快速确定候选标签,根据上一周期定位结果通过航位推算估计当前位姿[14],结合图5所示的相机FOV模型计算可观测标签所在的空间范围,从标签数据库快速确定候选标签。
式中,h和γ分别为探测距离和半水平视场角。
为便于快速检索,将定位区域栅格化且每个栅格内仅有1个标签,根据栅格序号存储标签数据。结合相机FOV模型分2步确定候选标签。
步骤1:粗筛。根据A、B、C点坐标确定相机FOV覆盖的栅格。
2.2基于方位角的标签匹配
考虑候选标签与相机观测标签一致时,两者方位角应一致。为此,设计如下的标签匹配策略。
步骤1:任选一观测到但未匹配的标签计算其方位角α与色彩特征相同的候选标签理论方位角的偏差
与采用所有特征数据进行总体优化匹配的方法相比,该策略可以有效避免因为遮挡等导致观测信息缺失引起的误差。通过上述过程,可以快速从标签数据库中获取相机观测到的有效标签及其坐标。
3高精度位姿求解
理论上,当有效标签数量不少于3 个时即可根据式(1)实现位姿解算[11],但实际应用时存在如下问题:1)标签与相机位姿、环境干扰等因素会引起像素误差,降低定位精度;2)根据式(1)构成的方程组进行位姿解算时存在矩阵逆运算,特定条件下奇异导致无法求解。为此,本节基于测角方程(1)分析误差传递特性,设计加权最小二乘位姿估计算法,建立迭代求解和最优估计的协同策略,实现高精度位姿求解。
3.1误差传递特性分析
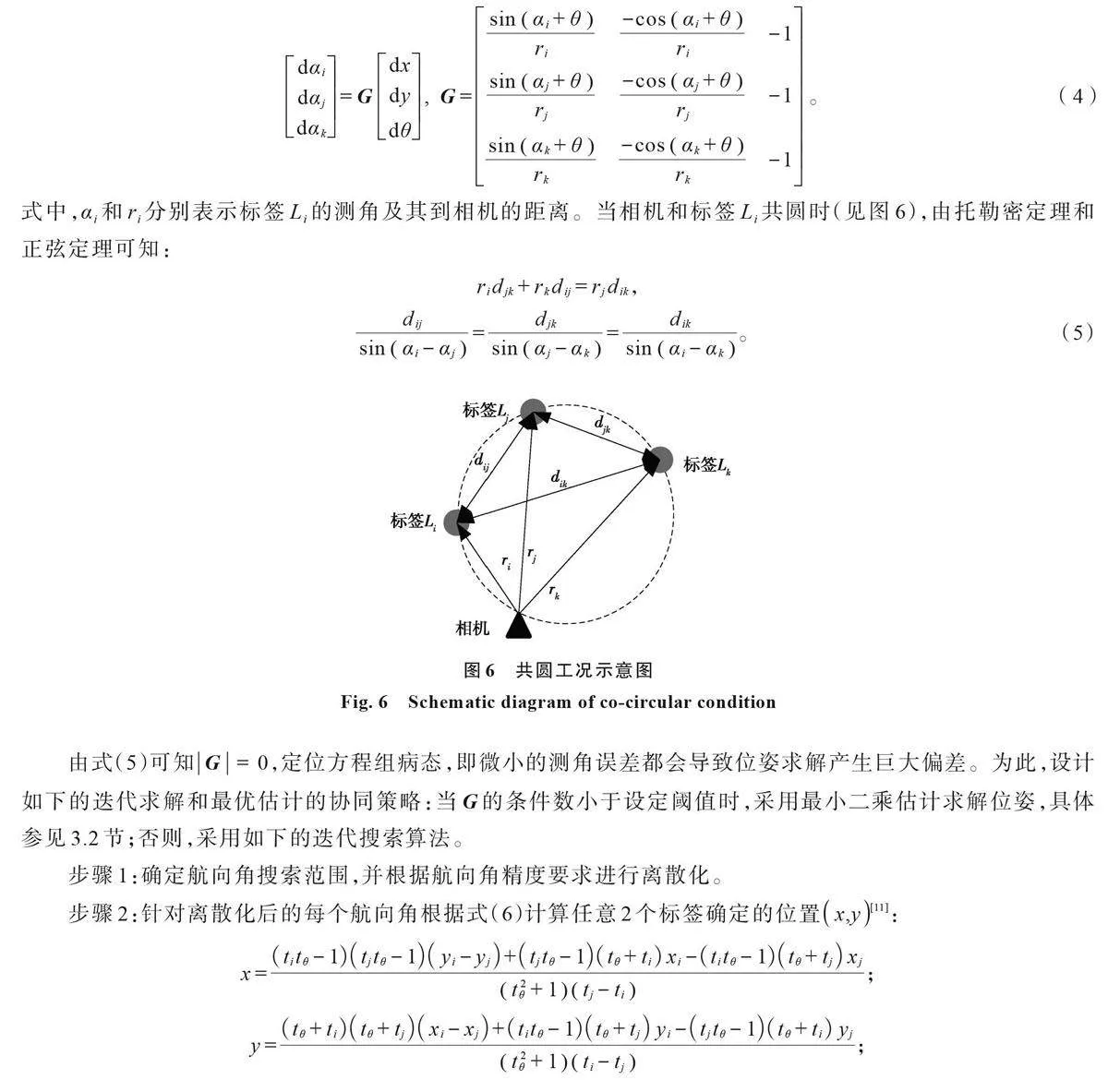
考虑3个有效标签可实现位姿求解,由式(1)采用灵敏度理论可得误差传递特性:
4实验验证与分析
在数值验证和分析所提算法有效性基础上,对实际定位精度与UWB 进行了对比实验。
4.1仿真验证和分析
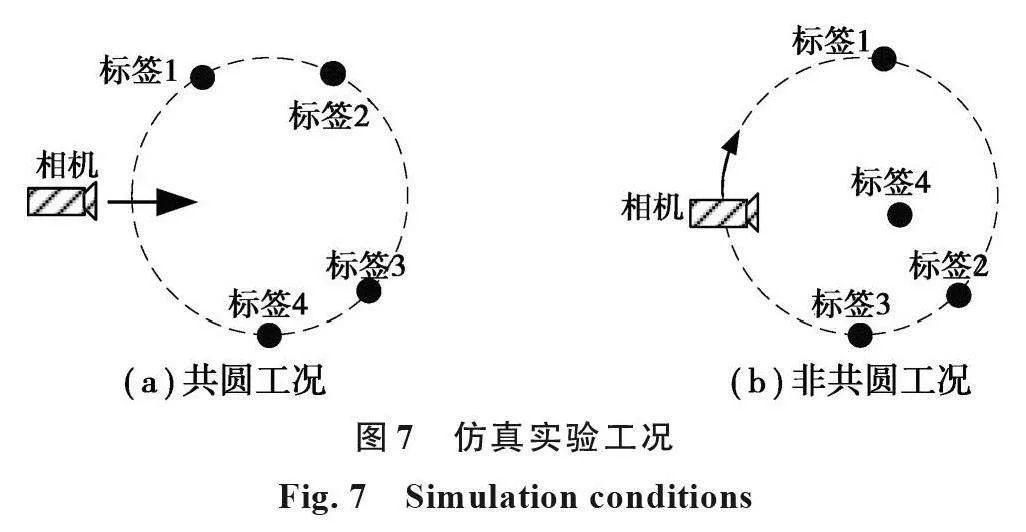
为验证所提协同求解策略和加权最小二乘估计的有效性,设计了图7所示的定位场景。共圆工况所有标签处于同一圆上,用于验证协同策略的有效性。非共圆工况中标签4与其他标签不共圆,相机沿圆周运动,用于验证设计的加权系数能够抑制不良标签组的影响。
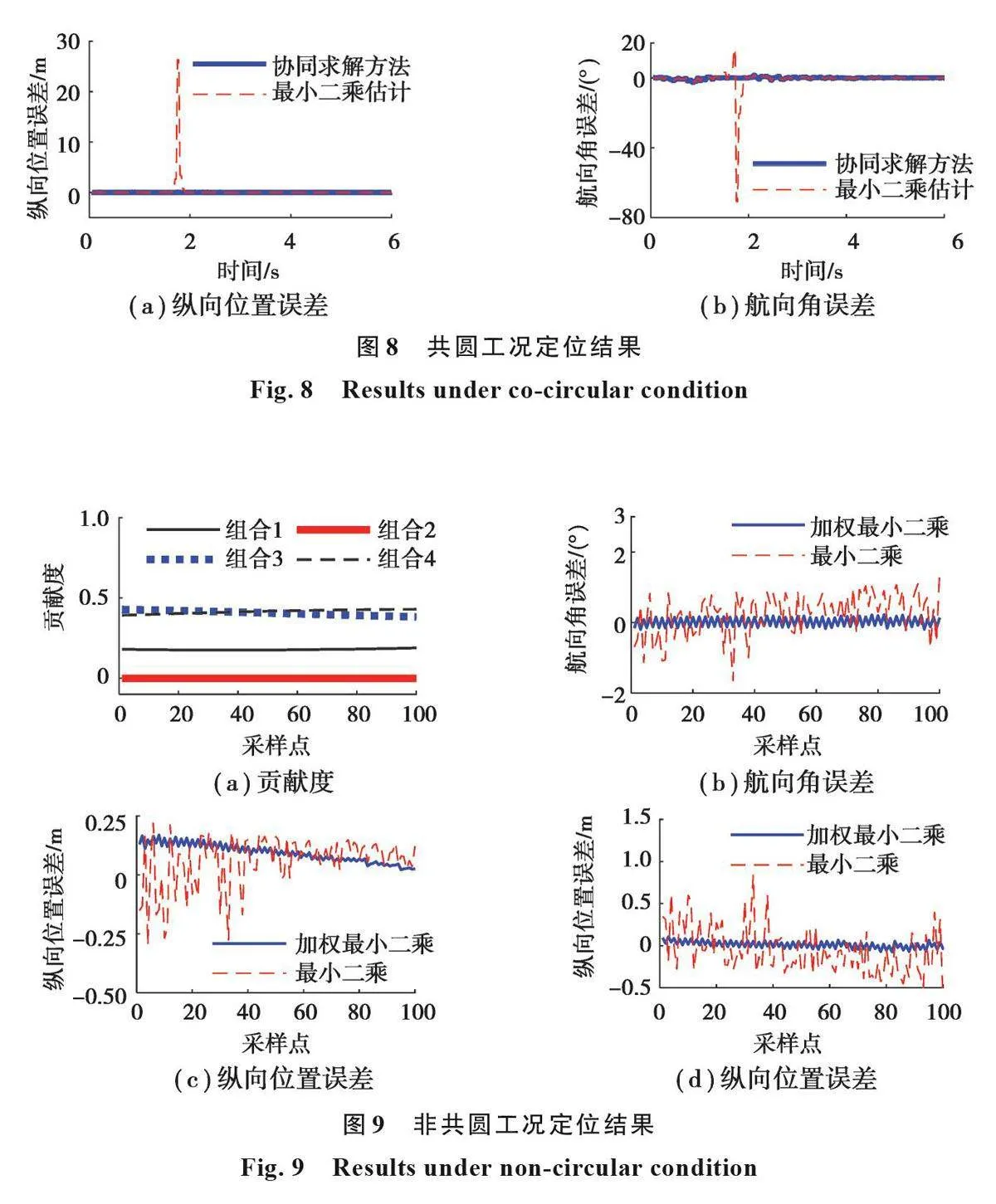
相机沿图7(a)中箭头方向匀速由圆外移动到圆内过程中的主要定位结果如图8 所示。在1.3~1.9s 间相机与标签处于共圆状态,此时根据式(1)建立的超定方程组奇异,导致最小二乘估计误差快速放大。而文中提出的协同策略能够正确判定超定方程组奇异性,并及时切换至迭代搜索算法,仍能够以较高的精度完成定位。
图7(b)所示工况中,每3 个标签为一组,共计4 种组合。其中,标签1、2、3(组合2)与相机始终处于共圆状态,该标签组合的求解精度最差。从图9(a)可以看出,组合2 对定位结果的贡献度接近于0。说明3.1节设计的求解质量评价指标能够反应不同标签组合的位姿求解结果的可信度。相应地,基于该指标的加权最小二乘位姿估计算法(8)能够有效抑制不良标签组的负面影响。从图9(b)~(d)可以看出,与非加权算法相比,所提估计算法的航向角和纵横向位置的最大估计误差分别降低了89.47%、51.61%和88.78%。
4.2 定位精度实验验证
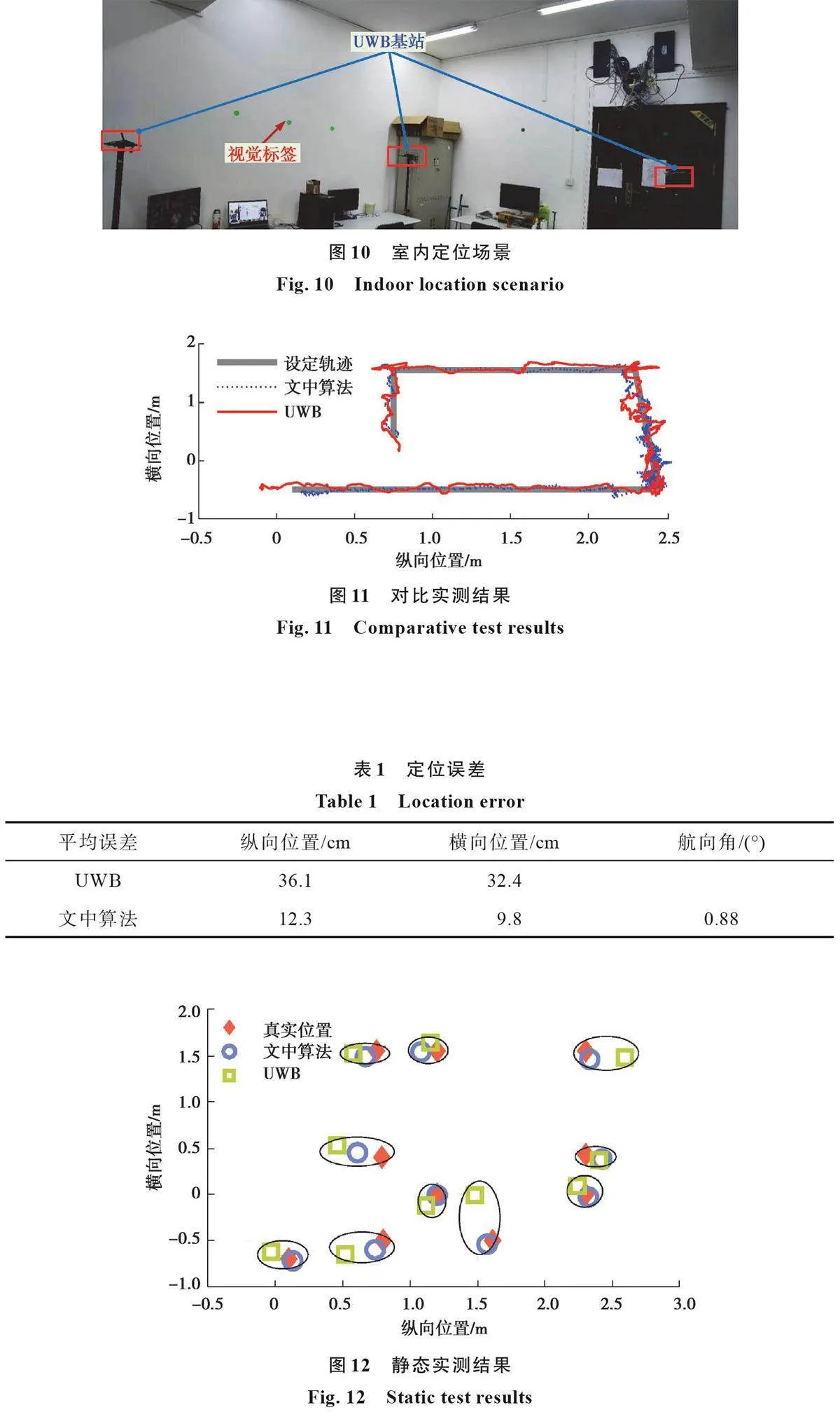
为进一步验证定位精度,考虑如下原因在图10所示的室内场景下与UWB 进行对比测试:
1)类似ORB-SLAM(oriented fast and rotated brief simutaneous lacalization and" mappling)的定位方法计算资源消耗较大;
2)在特征信息大幅遮挡或光照剧烈变化环境下,使用复杂纹理信息的视觉定位算法难以正常工作;
3)基于无线信号位置指纹的定位算法平均误差高达几米;
4)相对而言,UWB具有良好的实时性、较高的定位精度和较好的抗环境扰动能力。
测试时,定位算法运行于树莓派4开发板,处理速度为30 帧/秒。沿设定轨迹移动的定位结果如图11所示。
图11测试结果的平均误差如表1所示。与UWB相比,文中算法纵向和横向位置的平均误差降低了65.93%和69.75%。
由于移动过程中无法精确控制定位节点沿设定轨迹运动,表1统计的定位精度低于实际性能。为此,在定位区域内选择图12所示的10个测量点,静态测试定位结果以保证准确性。总体来说,UWB的平均误差为14.5cm,在(1.61cm, -0.50cm)位置的误差高达49cm。相对而言,文中算法的平均误差为5.5cm,最大误差仅为9cm,定位精度得到显著提高。
5结论
为实现低成本高精度的室内定位,文中设计了一种基于简易视觉标签的室内定位方法。仿真和实验结果表明:
1)基于相机FOV和方位角的标签匹配关联策略能够快速筛选标签数据库,实现非唯一性标签坐标的准确查询。
2)基于误差传递方程条件数的位姿求解算法切换策略能够及时准确检测标签共圆工况,并切换至合理的位姿求解算法。
3)设计的加权最小二乘位姿估计算法能够有效抑制不良标签组的负面影响。与UWB相比,文中所设计算法能够显著降低定位误差。
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:37:11
软件(2016年4期)2017-01-20 09:23:15
物理教学探讨(2016年11期)2016-12-19 21:55:19
科技视界(2016年25期)2016-11-25 20:33:17
电脑知识与技术(2016年25期)2016-11-16 14:58:08
中国科技博览(2016年21期)2016-11-14 10:20:27
中国科技博览(2016年18期)2016-10-19 06:43:40
电脑知识与技术(2016年21期)2016-10-18 23:35:56
科学与财富(2016年28期)2016-10-14 18:47:08
中国科技博览(2016年15期)2016-08-23 20:16:20