臂式高空作业平台变幅系统建模与模型降阶
2025-02-17 00:00:00牛轲磊贺尚红杨庚黄毅
重庆大学学报 2025年1期




关键词:高空作业车臂架;变幅液压系统;AMESim;实时仿真
中图分类号:TP391.7 文献标志码:A 文章编号:1000-582X(2025)01-033-12
高空作业平台是一种将人或物举升到空中指定位置进行高空作业的专用设备。当前对高空作业平台的设计开发主要集中在实车测试和离线仿真,而对设计效率更高、还原更准确的实时仿真研究较少,因此解决高空作业平台的实时仿真研究具有较高的工程应用价值。
近年来,随着仿真研究的不断突破,研究人员对实时仿真进行了大量的研究,杜朝阳等[1]提出了一种基于RT-lab的液压系统快速原型化的设计方法,多模型并行计算且满足实时仿真要求。李艳红等[2]所提出的可视化建模方法将多种可视化仿真建模语言开发的模型融合,实现复杂系统的模型开发、管理和运行,为复杂系统的实时仿真提供支撑。实时仿真应用研究大多集中在硬件在环仿真方面,如王琛等[3]提出了一种多层次、多时间尺度的半实物仿真系统,作为开发和测试直流微电网控制算法和运行策略的新方法。蒋鑫等[4]应用AMESim建立了某车辆整车仿真模型,并对模型进行实时化处理,将编译后的实时模型下载至实时处理器中,实现整车硬件在环仿真。Hao等[5]以综合电力系统为例,通过实时模拟器对电力系统模型进行仿真,将网络和能源管理系统作为实际的物理设备,构建了实时仿真的硬件在环实验平台。王鹏等[6]利用UM和Simulink软件建立了高速列车磁流变半主动悬挂控制系统联合仿真模型,通过构建整车悬挂系统硬件在环实验台,证明了控制策略的有效性和高速列车应用半主动控制悬挂的可行性。高宁等[7]设计实现了一种基于组合式仪器平台和Simulink的半实物仿真系统,通过分析RTW代码生成过程,实现Simulink模型的实时性扩展。并通过编写脚本文件,自动生成可在组合式仪器平台上运行的半实物仿真应用。Nemeş 等[8]使用AMESim 与Matlab/Simulink构建了电动汽车实时仿真模型,并建立了用于测试电动汽车电池组的硬件在环仿真平台。Ciornei等[9]使用NI VeriStand软件设计了一个用于实时评估电动汽车整车的虚拟测试台。Li等[10]研究了直接驱动电液伺服系统在模锻锤中的应用,使用AMESim 和Simulink 建立了组合仿真模型,通过对控制系统的实时仿真实验,验证了方案的正确性。以上的研究工作不仅对模型的实时化处理提出了新的研究方法,而且通过不同的仿真平台对多个领域进行分析与应用,由此可见当前的实时仿真技术已经较为全面,但对实时仿真模型的精确建模和模型降阶研究还有所欠缺。
综上所述,笔者以某臂式高空作业平台臂架变幅液压系统为例,建立臂架变幅液压系统精确模型,提出使用一种线性频域分析为主、活性指数分析为辅的分析方法,对AMESim建立的液压模型进行分析和简化。
1臂式高空作业平台臂架变幅液压系统原理
某臂式高空作业平台的臂架变幅液压系统原理如图1所示,主要由油箱、负载敏感变量泵、单向阀、换向阀、平衡阀、液压缸、溢流阀、流量阀、安全阀、卸荷阀组成。
工作时,变量泵将液压油输送至电比例流量阀,流经换向阀、平衡阀进入变幅液压缸,推动液压缸伸出,臂架做上变幅动作。回油时,回油路中平衡阀的顺序阀部分在进油压力的作用下打开,液压油经换向阀流回油箱。
图1中,卸荷阀作用为:当臂架不工作时,泵的流量通过卸荷阀以一个较低的压力卸荷;当臂架动作时,负载压力经单向阀传至泵的负载敏感口,液压泵提供系统所需流量,多余的流量则通过卸荷阀溢流到油箱。安全阀限定了系统的最高工作压力。溢流阀则在臂架变幅下时,限定负载溢流压力,避免损坏结构件,起到稳定压力的作用。
在整个臂架变幅运动过程中,变幅平衡阀起到了至关重要的作用:变幅油缸运动时,平衡阀调节顺序阀部分开口的大小,保证在负载的情况下,变幅速度平稳;油缸在受到较大外力作用时,又可以起限压保护的作用;在变幅动作停止时,油缸处于静置状态,此时的平衡阀起保压、锁止油缸的作用。比例流量阀带有压力补偿功能,保证电比例流量阀进出口压差恒定,使流过电比例流量阀的流量只与阀开口(即控制电流)大小有关系,而与负载力的大小无关,保证系统流量的稳定性。负载敏感变量泵可以有效解决在变幅过程中负载与流量不匹配的问题,泵出口的流量大小由泵出口压力和负载所需压力形成一定的压差控制,在压差的控制下实现泵流量随负载变化而变化的特性。
2变幅液压系统仿真模型
根据变幅液压系统原理、零部件结构原理和样本测试曲线,应用多领域建模仿真软件AMESim建立变幅液压系统的仿真模型。在建模时,对系统性能影响较大的元件,根据元件具体的结构尺寸使用HCD(hydraulic component design)库进行建模,其他影响较小的元件则使用系统液压库自带的标准模型进行设计。
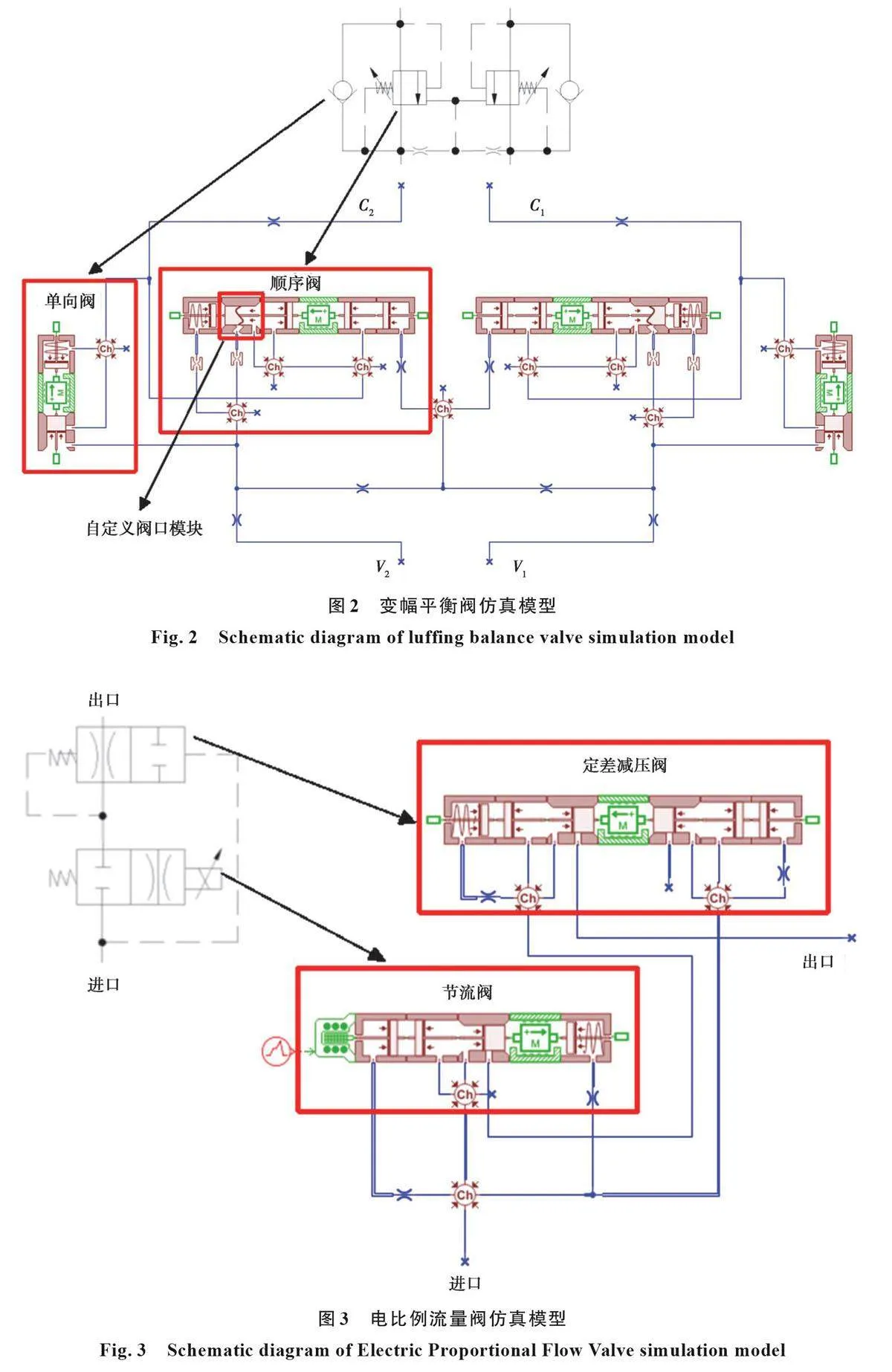
高空作业车变幅动作的平稳性直接影响高空作业车工作时的安全性和相关液压元件的使用寿命,而变幅液压系统中的平衡阀是影响系统平稳性的一个重要液压元件。文中所研究的某型臂式高空作业平台变幅系统采用深圳桑特液压公司的ST8143-A00C插装式平衡阀,根据插装式平衡阀的结构原理,通过AMESim中的机械库、液压库、HCD库中的液压元件模型块作为构建的基础,建立双向螺纹插装式变幅平衡阀的仿真模型,如图2所示。该双向平衡阀由2 个插装式平衡阀组成,对于单侧的平衡阀,由一个单向阀和一个顺序阀组成基本功能,整个模型的重点建模工作在于如何模拟插装式平衡阀中的阀口溢流形式,对此,文中使用自定义的阀口模块进行处理[11],通过外部的结构计算,得到阀芯位移与阀口溢流面积相对应的表格,通过表格定义阀芯不同位移下的溢流面积。仿真模型中的阀块内部和与之相连的各腔室以及腔室孔口,使用经计算后的液容模块及节流孔模块处理,与平衡阀连接的管道的动态效应予以忽略。
电比例流量阀由定压差减压阀(压力补偿器)和节流阀组成,根据其工作原理和结构,建立如图3所示的仿真模型。此处的压力补偿器保证电比例流量阀的进出口两端压差恒定,从而使电比例流量阀的出口流量只与阀口开度有关,保证系统流量的稳定性。
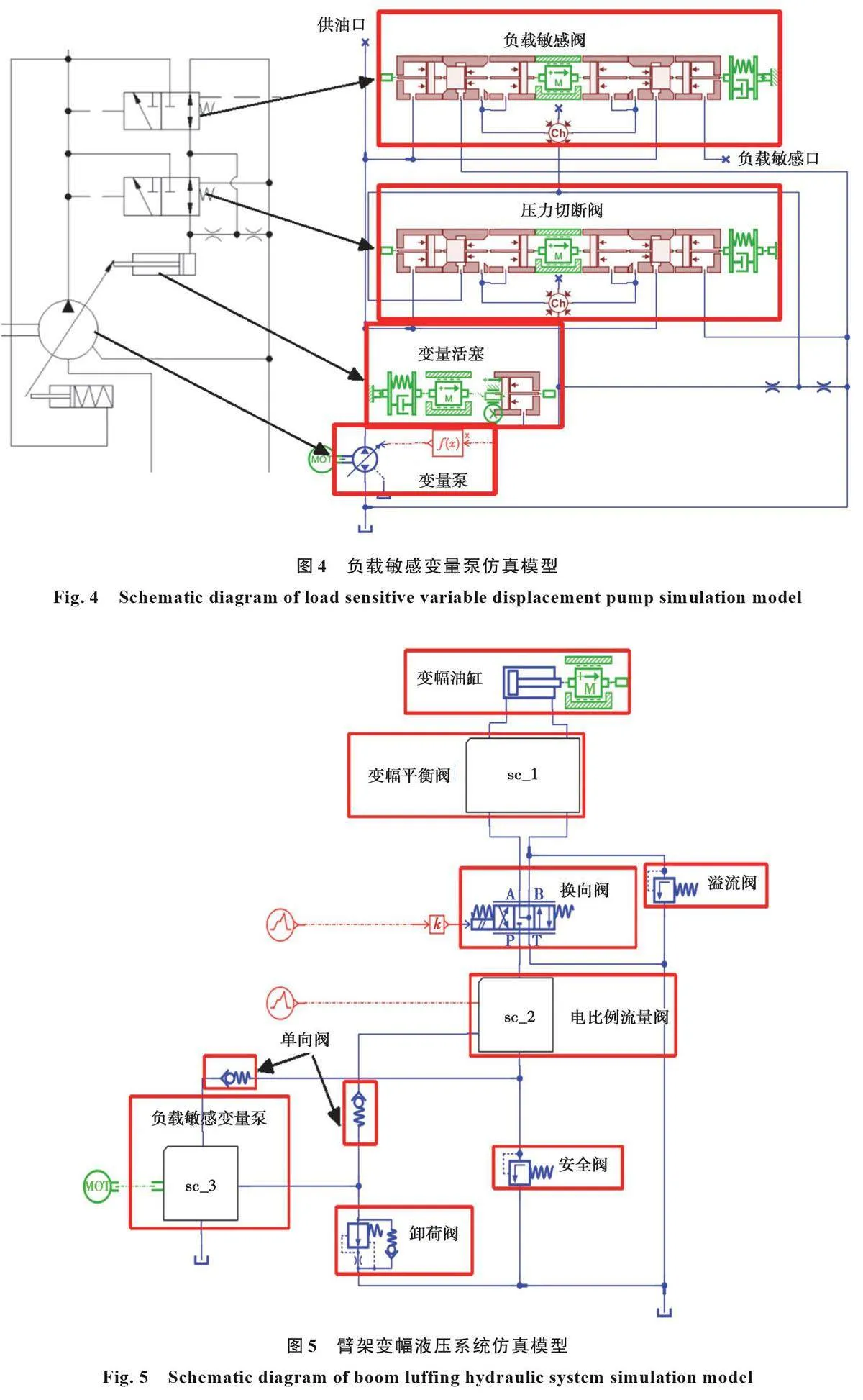
负载敏感变量泵的工作原理如图4左侧所示,由变量泵、负载敏感阀、恒压阀和变量活塞等组成,根据工作原理及结构,建立右侧的仿真模型。负载敏感变量泵根据负载的反馈压力调节压力切断阀与负载敏感阀的阀芯位移,通过受力变化,使变量活塞发生位置变化,进而斜盘倾角,改变泵的排量,实现泵的输出压力、输出流量与负载的压力、流量相匹配[12]。
在对高空作业车变幅液压系统建模时,使用上述负载敏感变量泵、电比例流量阀、变幅平衡阀的自建模型,结合液压库中的单向阀、换向阀、溢流阀、卸荷阀、安全阀等标准模型,通过参数设置与调整,最终建立臂式高空作业平台臂架变幅液压系统仿真模型,如图5所示。
3变幅液压系统模型验证
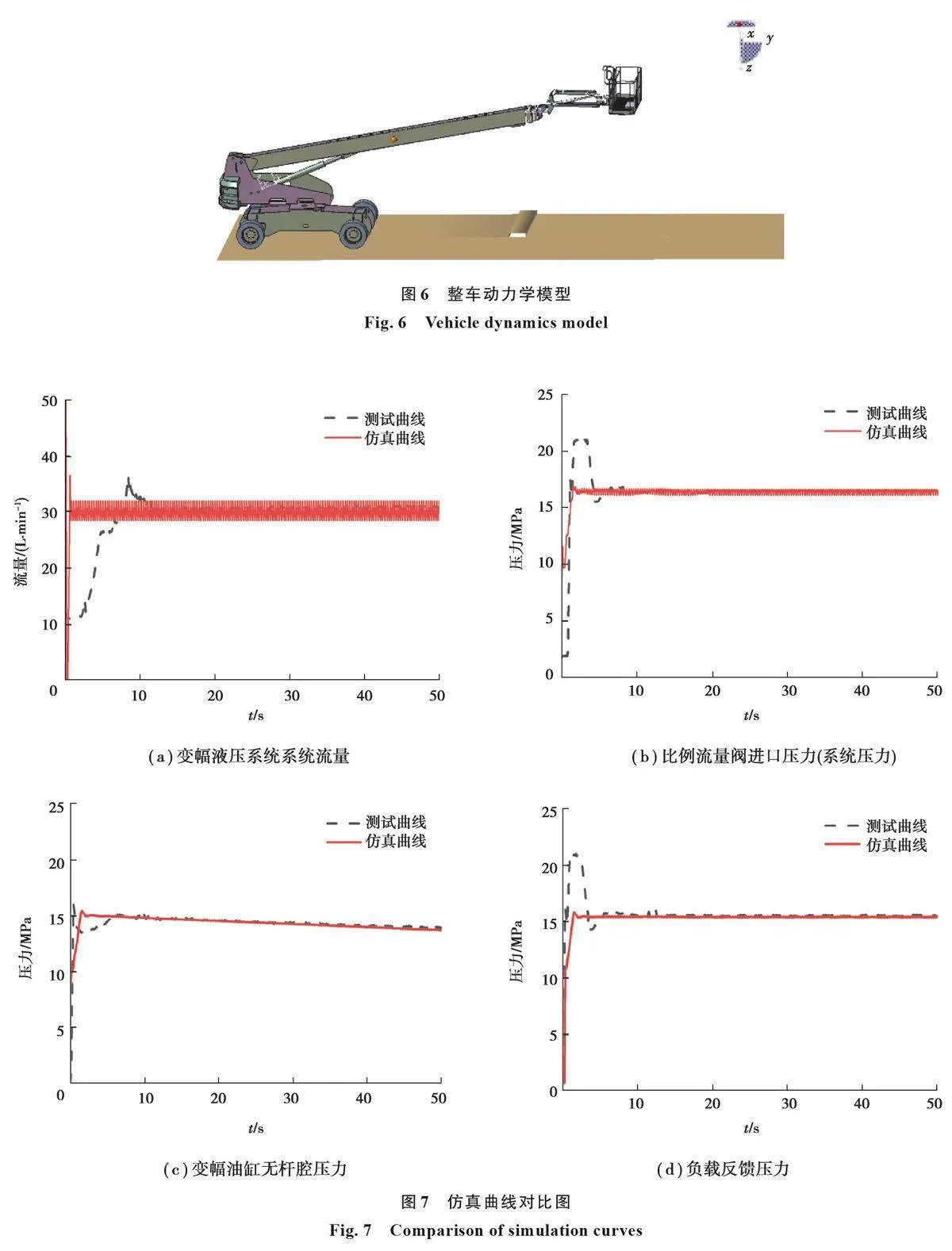
为验证所建臂架变幅液压系统仿真模型的准确性,更好地模拟变幅过程中负载的变化,使用Virtual.Lab Motion建立整车动力学模型,如图6 所示。通过AMESim与Motion采用Co-Simulation的联合仿真方式对液压模型进行测试,其联合仿真的工作原理为两者的求解器在分析过程中同时运行,分别求解各自的模型,在设定的通信步长上通过接口进行信息交换[13]。将动力学模型中被驱动部件的运动状态信息,即油缸位移、速度作为输出,将液压模型中油缸产生的力作为输入。
通过对比仿真与实验数据,确保仿真模型的准确性。选取主臂全缩状态下,臂架向上变幅的典型工况,在电比例流量阀全开的情况下,通过将控制信号输入到换向阀,使臂架向上变幅。对比仿真结果如图7所示。
由上述对比结果可以看出,臂架在刚开始运动时,存在部分偏差,但在稳定运行后,该仿真模型基本与实际系统符合,故模型建立基本正确,为接下来的模型简化提供了条件。
4仿真模型降阶
在AMESim搭建的复杂且保真度高的模型想要在实时平台上运行仿真,需要对模型进行相应的简化工作,这个过程也称为“模型降阶”。在这里,针对AMESim提供的分析工具,使用一种线性频域分析结合活性能量指数分析的方法,分析简化建立的仿真模型。
AMESim提供的性能分析器中的“频率”分析工具,可以识别系统在仿真过程中不同时间的无阻尼或不稳定的高固有频率,自动定位产生高特征频率的线性化时刻,分析在该时刻下的高固有频率的变量组成,以及分析该频率的实部、虚部、需要求解的最大时间步长。在此基础上,通过直接比较需要求解的最大时间步长和指定积分求解器的固定时间步长,对造成该最大求解时间步长的子元件进行删除或参数调整,以减少求解时间步长,达到简化模型的目的。
活性能量指数分析工具可以得出系统运行时各个子部件能量变化情况[14],直接得到在整个仿真过程中各个领域子模型的活性能量参与占比,通过消除具有最低活性指数的元件来实现模型的简化。通过计算模型中各个子元件的能量活性指数并结合线性频域分析,判断出其中能量活性指数低且固有频率远高于控制系统关注频带的子模型,并对其替换删除或参数调整,实现对原有模型的化简,以满足实时仿真需求[15]。
文中所研究的变幅液压系统,仿真模型的复杂度主要集中在变幅平衡阀、电比例流量阀和负载敏感变量泵,为此对这3个模型分别进行分析简化。以平衡阀仿真模型为例,进行实时简化分析。
通过线性频域分析得到每一个子部件的固有频率,针对拥有高固有频率的部件进行分析简化。而结合使用活性指数分析工具,则可以将拥有高固有频率且活性指数较小的部件进行删减,以简化平衡阀模型。
从可变时间步长解算器切换到固定时间步长求解器是使用实时研究模型的先决条件。为确保数值稳定和实时性要求,固定时间步长的值必须取在合理范围内。对于文中的平衡阀模型,简化目标是使用固定时间步长为0.1ms 的欧拉求解器,对应积分频率Fint=10kHz。为了使用欧拉方法进行稳定积分,积分频率Fint需满足以下要求(Fi 为i子部件的频率,Ri为实部)。
1)若i子部件是欠阻尼(振荡模式),则
若要实现模型简化,标准可变步长积分方法的当前积分频率低于要用于固定步长求解器的积分频率限制。通过线性分析再结合活性能量指数分析,对平衡阀模型进行简化。
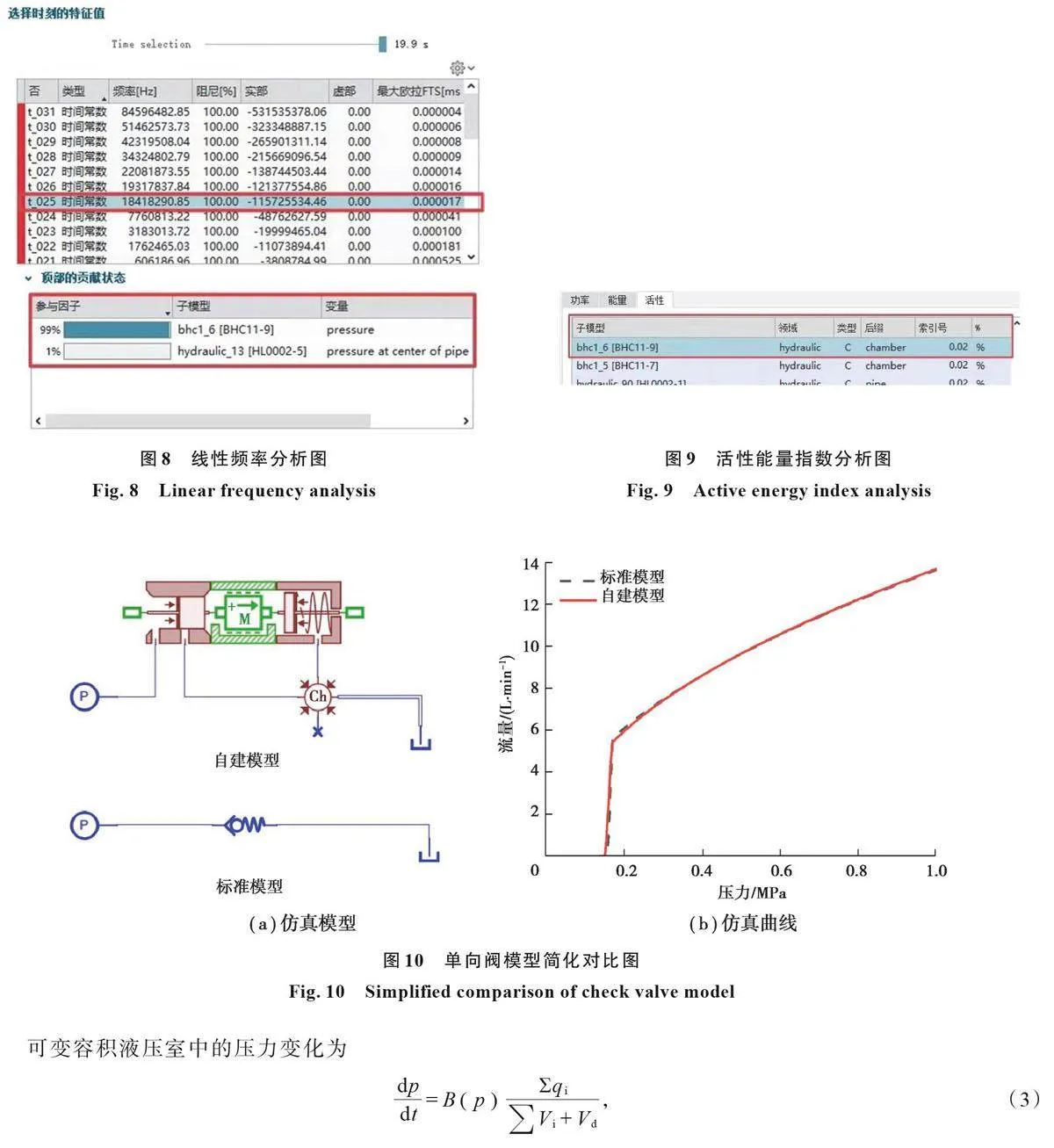
1)简化单向阀。通过如图8所示的线性频域分析可知,在19.9s的线性化时刻,产生1个18418 290.85 Hz的极大频率,需要计算的最大欧拉时间步长为0.000017ms,与设定的0.1ms 欧拉固定时间步长相差较远,通过“状态贡献”可以看出,对于该频率,腔室子模型的参与因子为99%,影响极大。结合图9的活性能量指数分析,在整个仿真过程中,该腔室子模型的活性能量指数为0.02%,可以忽略不计。结合两者的分析,说明单向阀腔室子模型在平衡阀模型仿真中对整个系统的影响较小,增大了整个模型的复杂度,影响模型运算速度,故可对该模型进行简化替代。使用Hydraulic 库的CV012标准单向阀模型,通过设置参数,也能达到同HCD库自建模型同样的效果,且不会带来腔室影响,如图10所示。
2)合并及简化腔室体积。由于尽可能还原变幅平衡阀中的腔室体积,所以腔体模型的体积参数设置都很小,这为系统增加了1个具有高频特性的状态变量。为了减少具有高频特性的腔体模型,可以将相近的腔体模型合并,将合并后腔室中的死体积修正为合并前多腔室死体积的总和。
可变容积液压室中的压力变化为
式中:B为液压流体的体积模量;qi为输入流量;Vi为输入体积;Vd为腔室的死体积。如果腔室的体积增加,则压力的时间导数减小,腔室体积的固有频率也会降低。
3)简化阀芯质量。质量块模型阀芯质量较轻,且移动距离较小。在液体压力及弹簧力作用下,阀芯会受到一个很大的作用力,阀芯的移动几乎是一个瞬变的受力平衡过程。由活性能量指数分析得出,阀芯质量块的活性能量只占整个系统非常小的一部分,可忽略,所以可以选用MAS005RT质量块模型(无质量子模型)代替原有的子模型,减少系统状态变量,简化模型。
4)简化阻尼孔。初始模型中的阻尼孔,一部分是为了模拟阀块的进出口,另一部分是为了模拟阀杆内部的通孔,由于每个孔口的压降都很小,对模型精度影响较小,且活动指数较低,也可进行删减。
按照上述的简化方法,分别对负载敏感泵及电比例流量阀进行简化,得到模型简化前后对比图,如图11所示。将简化后的模型进行组装,可得到整个简化后的臂架变幅液压系统仿真模型。
5降阶模型验证
为验证简化后模型的仿真还原度,对简化前后的臂架变幅液压系统仿真模型在同样工况进行仿真对比:臂架全缩,工作栏置于75kg的负载(操作人员),流量阀保持全开,通过控制信号使换向阀在0~5 s保持右位机能,5~10s保持中位机能,10~15s再次保持右位机能,使油缸缓慢运动。运行仿真,得到如图12的臂架变幅液压系统模型简化前后仿真对比曲线。从图中可以看出,油缸在运动过程中,简化前后油缸活塞位移偏差在0.01m左右,系统流量基本保持在30L/min左右,系统压力保持在10MPa左右,负载反馈压力在8MPa左右,偏差较小,由此可见,简化后模型符合预期目标。
实时意味着1s的模拟时间在1s内运算完成。简化前的模型在20s的仿真时间中的CPU 运算时间曲线都在实时参考特征曲线(y=x)之上,即CPU求解时间大于实际系统求解时间,简化前模型无法进行实时求解,如图13所示。而简化后模型的求解时间低于实际求解时间,满足实时性要求。
在获得臂架变幅液压系统简化模型后,将模型下载至基于NI 软件平台和PXI硬件设备开发的臂式高空作业平台VCU控制器半实物仿真系统中,需将模型转换成实时系统能接受的文件格式,设置同仿真平台软件VeriStand的仿真接口,编译生成可被VeriStand调用的“.dll”实时文件,将实时模型文件部署至实时机[16],实现了对变幅液压系统的实时仿真。
6结束语
1)利用商用建模仿真软件,建立变幅平衡阀、电比例流量阀、负载敏感变量泵仿真模型,用机械动力学仿真软件建立变幅液压系统的臂架负载动力学模型,通过机液联合仿真,以变幅液压系统系统流量、压力和油缸无杆腔压力及负载反馈压力为评价指标,实现了臂式高空作业平台整车条件下变幅系统的精确建模。
2)基于AMESim 提供的分析工具,使用一种线性频域分析为主、活性能量指数分析为辅的方法,将模型中固有频率较高且活性指数较低的子部件进行替换删除或参数调整,在保证模型较高还原度的前提下,对变幅液压系统复杂模型进行模型降阶,降阶前后的模型不仅控制了数值误差,且运算时间也满足实时仿真的要求。