语音控制的智能小车设计
2025-02-17 00:00:00张妍
科技资讯 2025年1期
摘""要:设计并实现了一种基于单片机的语音控制智能车系统。系统采用STM32单片机作为主控制器,配合语音识别模块、红外避障模块、循迹模块和无线通信模块等的协同工作,实现了小车的自主循迹和语音控制功能。通过语音指令的识别和处理,实现对智能小车的进退、转向和停止等控制。实验结果表明,设计的小车对指令的识别和动作执行迅速、准确,行驶稳定,说明设计方法正确有效,可以应用到其他类似的语音控制的场景,为无人驾驶汽车的研究奠定了基础。
关键词:语音控制""STM32单片机""避障""循迹
中图分类号:TN912.3;TP23
Design"of"Voice-Controlled"Intelligent"Vehicle
ZHANG"Yan
School"of"Information"Science"and"Engineering,"Dalian"Ocean"University,"Dalian,"Liaoning"Province,"116023"China
Abstract:"In"this"article,"a"voice-controlled"intelligent"vehicle"system"based"on"a"microcontroller"has"been"designed"and"implemented."The"system"uses"the"STM32"microcontroller"as"the"main"controller,"working"in"conjunction"with"a"voice"recognition"module,"an"infrared"obstacle"avoidance"module,"a"tracking"module,"and"a"wireless"communication"module,"to"achieve"autonomous"tracking"and"voice"control"capabilities"for"the"vehicle."Through"the"recognition"and"processing"of"voice"commands,"the"intelligent"vehicle"is"controlled"to"advance,"retreat,"turn,"and"stop."The"experimental"results"show"that"the"designed"vehicle"quickly"and"accurately"recognizes"commands"and"performs"actions,"with"stable"driving,"indicating"that"the"design"method"is"correct"and"effective."It"can"be"applied"to"other"similar"voice-controlled"scenarios"and"has"laid"the"foundation"for"the"research"of"autonomous"driving"vehicles.
Key"Words:"Voice"control;"STM32"microcontroller;"Obstacle"avoidance;"Tracking
信息技术的快速发展推动了汽车行业向智能化转型,智能小车集成了前沿技术,成为智能制造的关键标志,并在多个领域展现出应用潜力。它不仅是技术创新,也极具教育实践意义,在电子设计大赛和高校科研教学中占有重要地位。智能小车在功能、便携性和应用范围上具有优势,预示着其未来有广阔的发展空间。
1""整体方案设计
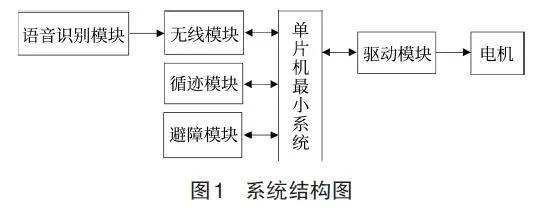
本系统设计了一种集成语音控制、自动循迹和避障功能的小车。硬件包括单片机最小系统、语音识别、避障、循迹和电机驱动模块,如图1所示。软件方面,通过编程和算法设计实现了语音识别、循迹、避障等功能。
2""硬件电路设计
2.1""STM32最小系统
系统的核心是STM32单片机最小系统,系统采用高性能控制器STM32F103RCT6为控制核心,和其他的外围电路共同将传感器中采集的信息进行处理,最终实现对语音控制小车的控制功能。STM32最小系统主要包括时钟电路、复位电路、电源电路等。
STM32晶振电路选择32MHz的晶振。晶振的输出连接到单片机的外部时钟引脚,为单片机提供基准时钟信号。STM32复位电路用于控制单片机系统启动和初始化的重要部分。它由复位电源、复位按钮和复位电路组成。复位电源是为单片机提供复位信号的电源,这里用的是3.3"V电源。
2.2""语音控制模块
语音信号处理模块是语音控制小车控制系统的重要组成部分,其主要功能是完成语音信号的采集、处理和识别,从而实现小汽车的语音控制功能。模块内置STC11L08XE单片机和一个咪头。在语音信号采集阶段,模块使用内置的咪头采集环境中的语音信号,并进行采样和量化处理。在语音信号预处理阶段,模块对采集到的语音信号进行降噪、滤波、分帧等处理,提高信号的质量。在特征提取阶段,模块从经过预处理的语音数据中提取关键特征,如Mel频率倒谱系数(Mel"Frequency"Cepstrum"Coefficient,MFCC)。在建立声学模型阶段,模块使用训练好的高斯混合模型(Gaussian"Mixture"Module,GMM)等算法建立声学模型,以便在语音识别阶段进行匹配。在语音识别阶段,模块将采集到的语音信号与建立的声学模型进行匹配,并输出识别结果[1]。
2.3""NRF24L01无线模块
NRF24L01是一种低功耗、高性能的无线通信模块,被广泛应用于无线传输领域。它具有高速数据传输、多通道和多设备通信、低功耗设计、强大的抗干扰能力以及灵活的配置和接口[2]。
本文选择NRF24L01无线模块用于单片机与语音控制模块进行通信,实现语音信号控制小车的运动。使用能发射或接收端CE接单片机的P1.5,CE不能为高电平,为了防止NRF24L01内部发送数据时锁相环开环控制造成载波振荡;SPI引脚MISO、MOSI、SCK和CSN用来配置24L01的发射、接收、空闲和掉电模式,分别接到单片机的P1.1~P1.4;中断端IRQ,接到单片机的P1.0,当NRF24L01接收到有效的语音数据,该模块就能通过IRQ引脚传输数据,单片机从NRF24L0l自带的RX寄存器中读出接收到的数据;振荡器选择16M晶振,功率放大器供电端VDD_PA输出为1.8"V,ANT1和ANT2接天线,电源选择3.3"V[3]。
2.4""电机驱动模块电路设计
L298N是一种双H桥直流电机驱动器,通过稳定电源电压来控制电机的供电,以实现电机的稳定运行。它可以提供高达2"A的电流输出,并具备双向驱动功能,适用于直流电机的控制。L298N电路模块采用了双桥驱动芯片,通过控制输入信号来调节电机的转速和方向。它具有多个引脚用于连接外部控制信号,包括使能端、方向端和PWM输入端。引脚OUT1、OUT2接电机M1,OUT3、OUT4接电机M2。TN1~TN4引脚分别接单片机的PB5~PB8,可以实现电机的正转、反转、制动和停止等操作[4]。
2.5""循迹模块电路设计
循迹模块采用一对灰度传感器对管,分别连接在单片机的PB13、PB14口上,用于实现小车的循迹功能。灰度传感器对管是2个反射式红外光电传感器ST188的组合,能够检测地面的反射光强度,从而判断小车当前所处的轨道位置。循迹模块中的灰度传感器对管通过对比不同通道的光强度,可以判断出黑色和白色地面的差异,从而确定小车是否偏离轨道。当小车偏离轨道时,灰度传感器对管会检测到不同的反射光强度,通过控制系统的反馈机制,使小车进行相应的调整,以实现精确的循迹操作。
2.6""红外避障模块电路设计
红外避障模块是利用ST188配合比较器实现避障功能,模块输出端接单片机的PB12引脚上。小车行驶过程中,红外避障模块发射红外光并监测其反射情况。当发射出去的红外光没有发射回来,光电晶体管没有电流处于截止状态,比较器的同相端电压比反相端电压高,输出高电平,发光二极管处于熄灭状态,小车判断前方没有障碍物。当光线遇到前方物体并反射回来时,光电晶体管导通,比较器的同相端电压被拉低,比较器输出低电平,此时,发光二极管被点亮,小车能够判断前方存在障碍物。
3""软件系统设计
3.1""STM32单片机主程序设计
在主程序中,首先进行系统初始化和外设配置,然后进入一个判断。如果是循迹模式,读取左右循迹传感器的数据。程序通过读取的数据来实时监测前方障碍物和地面黑线,根据监测结果来调整小车的运动状态,使其能够实现自动循迹行驶的功能;如果是语音控制模式,通过串口通信和NRF24L01无线模块,程序能够接收和发送指令,实现语音控制和数据传输。
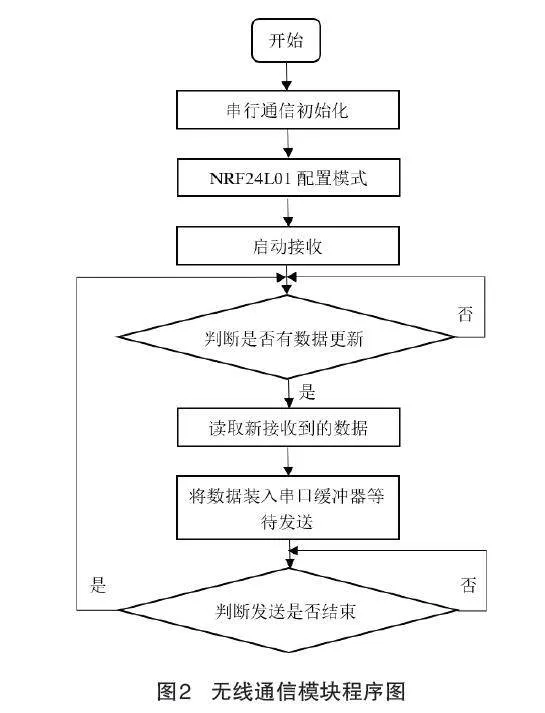
3.2""NRF24L01无线通信模块程序设计
NRF24L01无线通信模块程序首先对24L01模块进行初始化和检测,确保模块正常工作。通过设置寄存器来配置发送和接收地址,程序读取和写入寄存器以及发送和接收数据。发送数据时,程序将待发送数据写入发送缓冲区,并启动发送过程。发送完成后,程序检查发送状态并清除相关中断标志。对于接收数据,程序等待接收完成并读取接收缓冲区的数据。整个过程中,程序使用SPI通信,并根据不同情况返回相应的状态或错误码。
3.3""语音识别模块程序设计
系统初始化后,通过内置麦克风或外部音频输入接口进行音频采集。采集到的音频信号需要经过预处理,去除噪音和增强语音特征。通过特征提取算法从音频信号中提取关键的语音特征,将其转化为可供识别的特征向量。在特征提取完成后,将提取到的特征与预先训练好的语音模型进行匹配,通过比较相似度确定最可能的识别结果。最后,将识别结果输出给无线通信模块,无线通信模块数据传输给单片机,以实现语音控制。
3.4""L298N电机运动控制程序设计
首先,确定哪些引脚用于控制电机的方向和速度,初始化引脚和变量;其次,通过单片机的IO口或PWM输出来生成相应的控制信号,控制引脚的高低电平和脉冲宽度进而控制电机的运动。
4""系统测试
该系统通过了语音控制功能测试、避障功能测试和循迹功能测试。
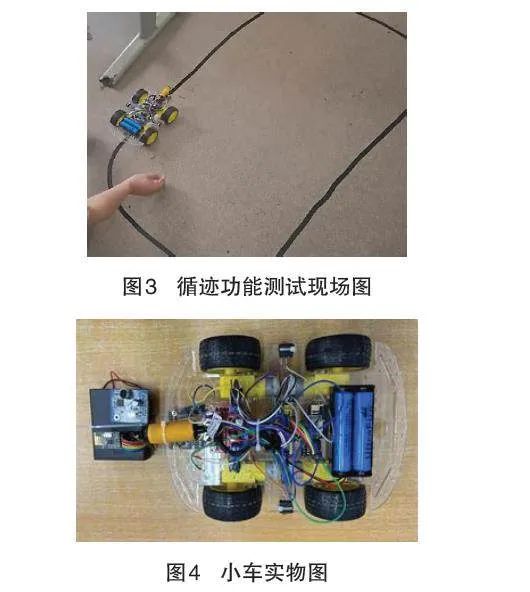
语音控制功能测试涵盖了5种指令:左转、右转、前进、后退和停止,平均响应时间低于0.5"s;红外避障功能测试过程中,以教室的讲台为障碍物,小车可以在20"cm的距离范围内检测出障碍物并做出预期的避障行为;循迹功能测试过程中,在教室地面上绘制了一条环形作为指示线路,然后观察小车的行为。测试结果表明,小车能够准确地识别和跟踪地面上的黑线,并沿着指定路径稳定地行驶[5]。
5nbsp;"结语
本系统通过语音识别模块将语音指令转化为控制信号,实现对小车的方向、运动控制。通过红外传感器感知周围环境,自动跟随指定的轨迹行驶或者探测到障碍物能及时做出避让动作实现自主循迹、避障功能。这一成果不仅验证了设计理念,也提供了一个实践电子设计和编程技能的教学平台,能够激发学生对科技探索的热情,培养他们的创新能力和团队协作精神。
参考文献
[1]"丁书亚,王鲁云.语音控制遥控小车设计与制作[J].电子元器件与信息技术,2020,4(6):75-76.
[2]"黄凯荣.语音控制智能小车的设计[J].电子制作,2020(15):41-44.
[3]"米媛园,李光宗,乔丹妮.基于LD3320的语音控制和自动避障的智能小车设计[J].计算机测量与控制,2021(24):36-37,40.
[4]"王钰,朱琳,苏世雄,等.基于STM32的双模式智能避障小车系统设计与实现[J].自动化与仪表,2021,36(3):33-36,54.
[5]"田亚立,梁波.语音和射频遥控的多功能小车设计[J].福建电脑,2022,38(12):61-68.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2017年1期)2017-05-17 03:54:20
中国新技术新产品(2017年2期)2017-01-20 18:09:43
科技创新与应用(2016年34期)2016-12-23 10:14:38
电子技术与软件工程(2016年20期)2016-12-21 10:44:40
电子技术与软件工程(2016年19期)2016-12-19 20:34:26
科技视界(2016年26期)2016-12-17 08:35:54
教育界·下旬(2016年8期)2016-12-14 10:01:53
电子制作(2016年11期)2016-11-07 08:43:49